云闪定位系统中的数字AGC设计
2015-06-07孙秀斌唐昕瑜肖坤峰
卢 舟,孙秀斌,唐昕瑜,肖坤峰
(1.成都信息工程大学电子工程学院,四川成都 610225;2.中国气象局大气探测重点开放实验室,四川成都 610225;3.成都傅立叶电子科技有限公司,四川成都 610045)
云闪定位系统中的数字AGC设计
卢 舟1,2,孙秀斌1,2,唐昕瑜1,2,肖坤峰3
(1.成都信息工程大学电子工程学院,四川成都 610225;2.中国气象局大气探测重点开放实验室,四川成都 610225;3.成都傅立叶电子科技有限公司,四川成都 610045)
在云闪定位系统中,天线接收的闪电辐射源信号会因为云闪与天线的距离、闪电电磁辐射的强弱等因素而不稳定。为了使系统接收到的电磁辐射信号保持在一定动态范围内,本文介绍了一种基于FPGA和数控衰减器的数字AGC系统,给出了硬件电路总体设计方案以及各部分电路的设计方法,并且详细介绍了基于切比雪夫逼近法的数字AGC功率估计算法以及AGC算法实现流程。该设计方案实现了对云闪信号的数字自动增益控制,为云闪定位系统中的数控AGC工程实现提供了一种切实可行的方案。
云闪定位;数字自动增益控制;切比雪夫多项式;FPGA;AD9446
0 引言
闪电是一种伴随有强脉冲放电过程的自然灾害性现象,它可分为云闪和地闪两大类。云闪是指发生在云内或云际之间的放电现象,地闪是指发生在云体与大地或地物之间的放电过程[1]。通过探测云闪放电过程辐射的电磁脉冲,可以连续跟踪雷暴发展的过程,并确定云闪发生的位置。目前的地闪定位系统已经日趋完善,然而国内还没有研发出成熟的云闪探测设备[2]。因此,对于云闪定位系统的研究及其设备的研制变得紧要。
云闪定位系统的动态范围是其可接收最大信号与最小信号的功率之比,而灵敏度则可表征系统接收微弱信号的能力。灵敏度越高,云闪定位系统能探测的距离也就越远。对处于复杂电磁信号环境下的云闪定位系统来说,获得大动态范围则显得相当重要。在接收弱电磁信号(云闪发生在较远处)时,要提高定位系统的增益;在接收强电磁信号(云闪发生在较近处)时,要使定位系统的增益随信号的增强而降低,这样才能确保云闪定位系统能够正常工作[3]。为了防止近距离的强云闪电磁脉冲信号引起ADC过载,需要合理分配定位系统接收通道中各器件的增益,因此设计一款数字自动增益控制电路(AGC)用以调节定位系统的动态范围显得极其重要。
1 数字AGC原理及系统总体设计方案
1.1 数字AGC原理
数字AGC相对模拟AGC而言能实现比较复杂的算法,数字AGC技术是指将接收到的模拟信号数字化,然后计算样本幅值的大小反过来控制前端放大电路中的可编程数控衰减器,配合相应的放大器将输出信号调整到适合检测的幅值范围内,通过FPGA控制可编程数字衰减器来使输出的数字信号幅度或者功率达到稳定状态[4]。
1.2 系统总体设计方案
云闪电磁辐射信号由天线接收后,经信号调理电路送入数字AGC系统,系统框图如图1所示,信号经过一级放大,数控衰减,二级放大,带通滤波后进入A/D采样,采样后的数据送入FPGA处理,使用AGC算法生成控制字对数控衰减器的衰减幅度进行控制,通过上述方案实现闭环控制以确保A/D输入不过载。
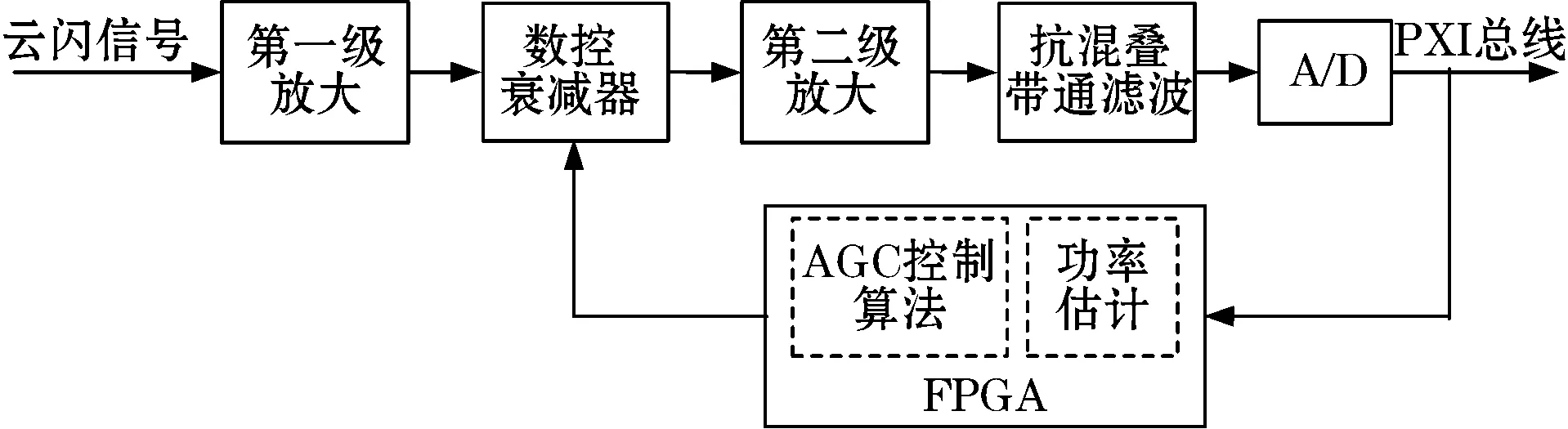
图1 数字AGC系统框图
2 数控AGC硬件电路设计
首先选用LM318进行一级放大,使天线接收到的信号具有一定增益,接着通过数控衰减器HMC629LP4,再由AD8009级联进行2级放大,经过抗混叠带通滤波后由AD9446进行模数变换,FPGA芯片接收到A/D转换出的数字信号后用AGC算法进行处理,主要是通过切比雪夫多项式逼近系数逼近来实现对数运算;接着由FPGA控制前端的数控衰减器,将信号衰减到适合A/D模拟输入的范围,最终实现信号的数字自动增益控制。
2.1 一级和二级放大
本设计中第一级放大选用LM318运算放大器,它具有速度快、电压转换速率高、频带宽、动态范围大等优点,适合于在数控AGC中作云闪脉冲放大器。第二级放大器选用2块AD8009作级联放大,G1=20 dB,G2=12 dB,第二级放大总增益为32 dB。
2.2 数控衰减器
信号采集系统中大动态范围设计的实现主要取决于数控衰减器,数控衰减器的衰减量大小由可编程逻辑器件进行控制。当云闪电磁辐射信号幅度较小时不衰减或减小衰减量;反之,适当增大衰减量,以适应各种幅度的信号。本次设计选用数字衰减器HMC629LP4。它是一个4位数控衰减器,其最大衰减量为45 dB,需要5 V或3 V单电源供电。数控衰减器工作模式分为2种,串行数据输入模式和并行数据输入模式,其中并行输入又分为直接并行模式(Direct Parallel Mode)和锁存并行模式(Latched Parallel Mode),本方案采用直接并行模式。FPGA根据AD转换输入的数字信号进行功率估计,然后通过IO口控制HMC629LP4的D0~D3引脚,可以进行3 dB、6 dB、12 dB、24 dB和45 dB的衰减[5]。数控衰减器电路原理图如图2所示。
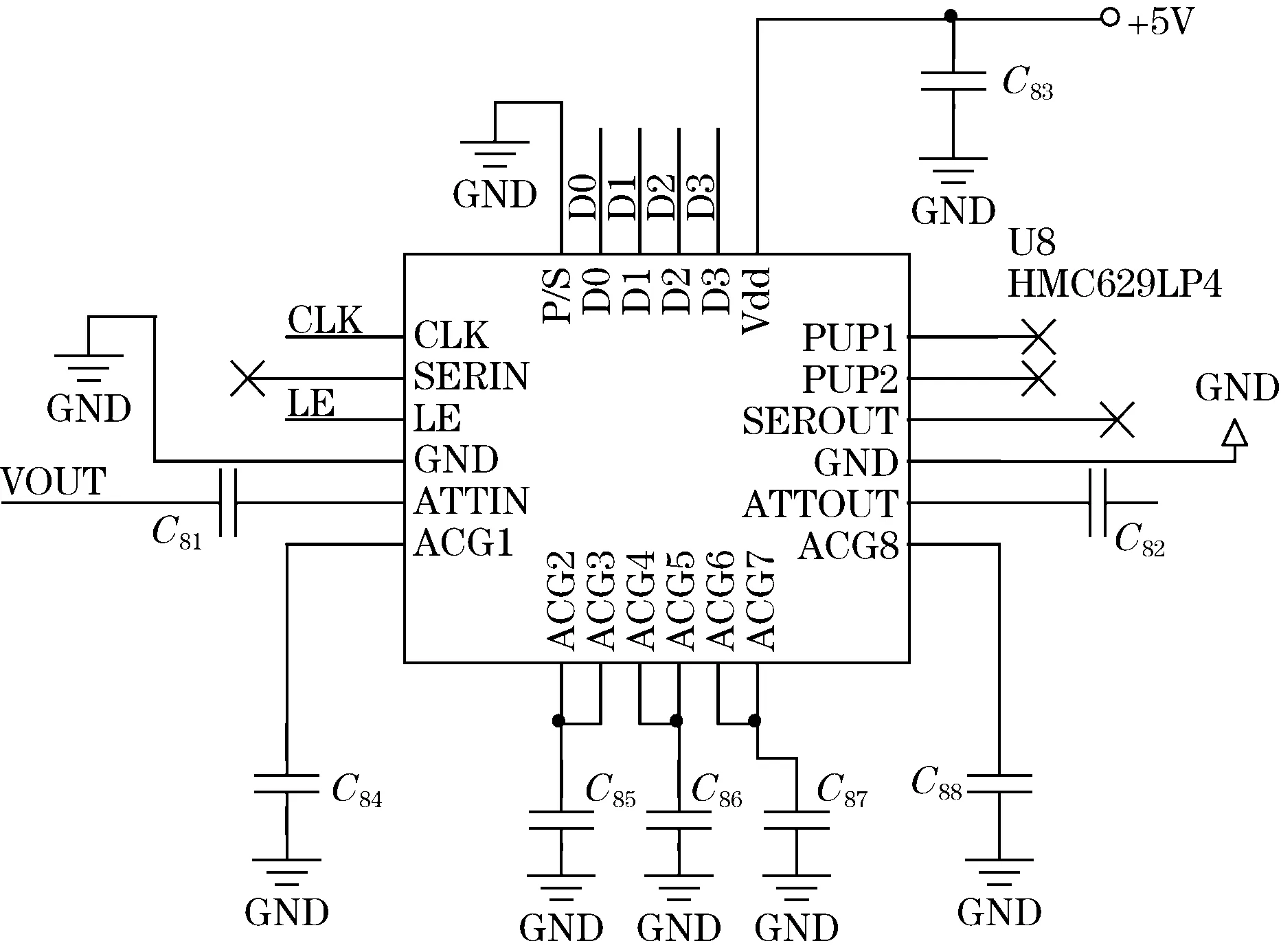
图2 数控衰减器原理图
2.3 抗混叠带通滤波器设计
云闪放电主要辐射VHF(甚高频)信号,抗混叠带通滤波器是为了滤除低频干扰信号,而有效地采集云闪高频信号。本文设计了一个通带为110~118 MHz的模拟带通滤波器(BAND-PASS FILTER),使用Filter Solutions滤波器设计软件来进行巴特沃斯无源带通滤波器设计,滤波器类型为巴特沃斯带通,设置滤波器参数中心频率为114 MHz,带宽10 MHz,低端截止频率为100 MHz,高端截止频率为150 MHz,滤波器阶数设置为3阶。软件计算完成后还要修改R、L、C的参数值直到其满足实际设计和幅频特性的要求为止,3阶无源巴特沃斯带通滤波器电路图如图3所示。
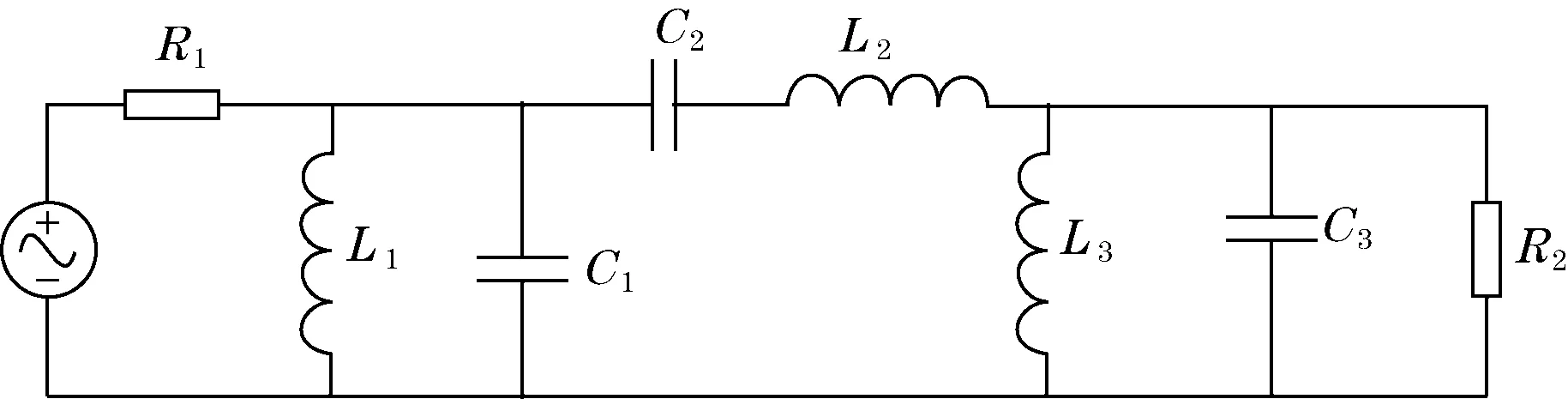
图3 3阶无源巴特沃斯带通滤波器电路图
2.4 采集电路
云闪信号采集系统中模数转换器A/D的作用十分关键,模拟信号经A/D器件转换后得到数字信号,便于FPGA进行处理。因此模数转换器A/D的选择决定了整个信号采集系统的性能。本文根据云闪信号采集系统的设计需求和已经选取的信号采样频率fs=60 MHz,选择的16位超高速CMOS模数转换器AD9446作为系统的信号采集芯片,采样速率为100 MSPS[6]。AD9446的模拟电压输入范围有2种分别是2 V和3.2 V,系统采用3.2 V为模拟电压输入范围,那么可以得到AD9446的最小分辨率为:
(1)
AD9446的信号输入方式为差分输入,这是因为信号转换前前端电路对信号进行了放大和衰减处理,差分输入信号能很好的提升芯片性能,同时也能够很好地抑制偶次谐波。此外,差分输入信号也能够很好地抑制对地和电源噪声以及共模信号的干扰。AD9446直接输出16位二进制码转换数据,非常有利于后端数字信号处理。
2.5 逻辑控制模块
数控AGC系统中核心控制器选用可编程成逻辑器件(FPGA-Field Programmable Gate Array)来实现。FPGA主要完成AGC算法、信号功率估计和数控衰减器的逻辑控制等任务。本文逻辑控制芯片选用Cyclone(飓风)I系列中的EP1C6T144C8。该芯片性价比高、片上资源丰富、容量大,适用于本设计中的逻辑控制。
3 FPGA的自动增益控制算法设计
数字自动增益控制电路通过检测信号的功率和自动调节模拟前端的增益而使定位系统的输入信号幅度在ADC的动态范围内。对于小信号而言,AGC不起作用,此时定位系统的增益最大。随着信号增强,AGC开始工作,确保ADC的输入信号不过载。AGC电路分为模拟AGC和数字AGC,数字AGC是根据模拟信号数字化后的样本功率大小来自动控制前端电路增益的。为了简化,数字自动增益控制AGC原理如图4所示,A/D转换器完成采样后,对数字信号进行功率估计,之后与门限值进行比较决定衰减器的衰减量,形成稳定的AGC环路。
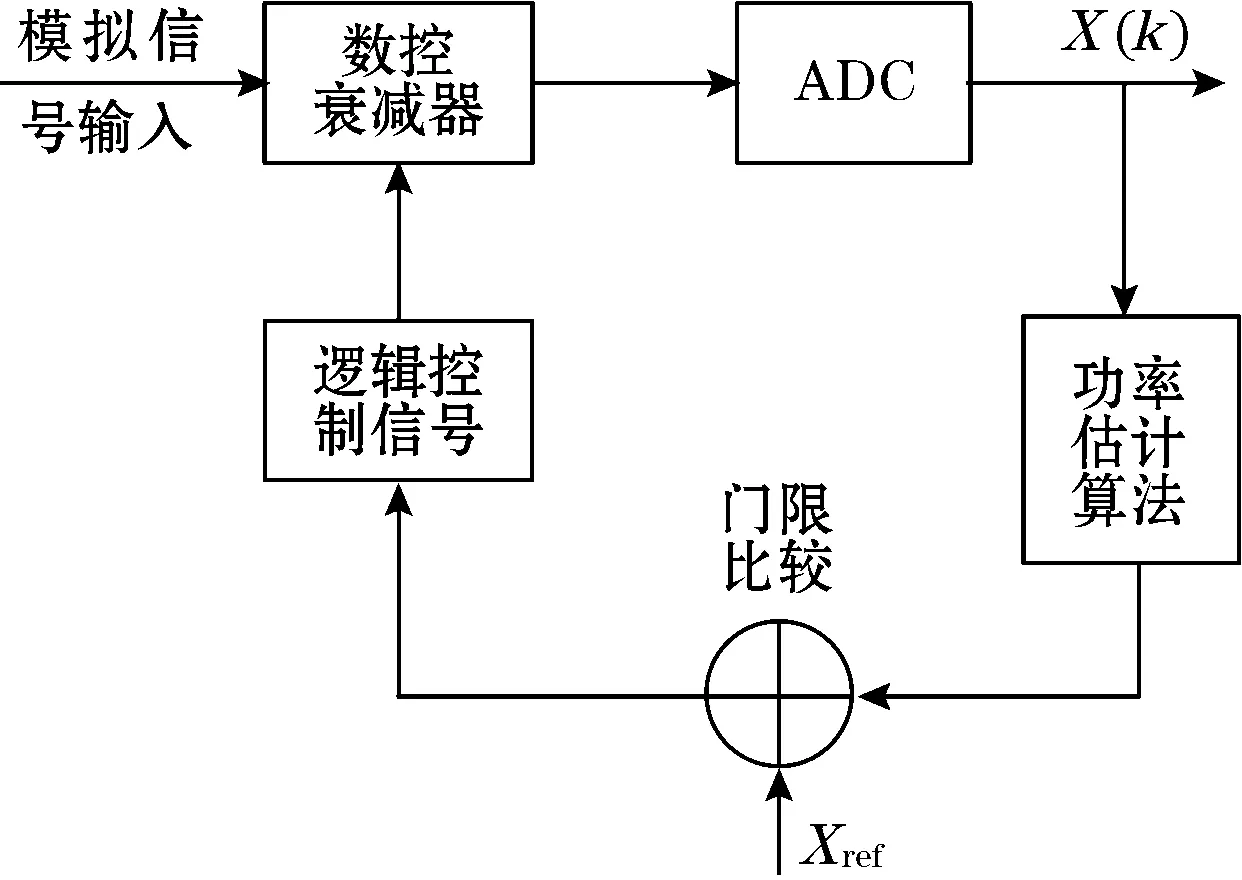
图4 数字自动增益控制AGC的原理框图
A/D转换器中采样数字信号值为M,VP-P的计算公式如式(2)所示。
(2)
由于A/D转换器信号输入范围采用0~3.2 V,则其满度输入信号功率由接收机功率估计公式可得
(3)
对该公式进行推导得
(4)
令10log(2.5)为常数R,公式化简为
PF=20lgVP-P+R
(5)
数字AGC中要实现对采样信号的功率估计,根据公式需要在FPGA内实现对数运算。经典的CORDIC算法能够在硬件中实现对数运算,但是CORDIC算法在取得高精度的同时迭代次数过多,造成内部延时变长[7]。本文采用的算法是通过切比雪夫多项式逼近系数逼近来实现对数运算,该算法能够有效减少实现过程中的迭代次数。利用切比雪夫逼近实现函数的原理是建立在切比雪夫多项式的理论基础之上的,切比雪夫多项式如下:
TK(x)=cos(karccos(x)) (-1≤x≤1)
(6)
通过切比雪夫多项式进行函数逼近可以写成
(7)
利用切比雪夫逼近可以将f(x)表示为16位精度的切比雪夫多项式[7]
f(x)=lg(1+x)=(28 438x-13 938x2+8 078x3-3 699x4+848x5)/216(0≤x≤1)
(8)
又由于AD9446的输入范围为0~3.2 V,所以将f(x)变换
F(x)=lg[1.6(1+x)]=f(x)+lg1.6 (0≤x≤1)
(9)
先计算出f(x)便可以得到F(x),算法模块输入值A为将0~1范围的x值映射至0~65 536范围后的值,即当x=0.5时1+x为1.5,x映射值为0.5×65 536=32 768,算法输出结果为F。由于该算法定义范围0≤x≤1,即1.6≤1.6+1.6x≤3.2,所以VP-P在1.6~3.2 V的范围内能够直接采用算法计算lgVP-P,而当VP-P处于0~1.6 V范围内时则需要进行变换使计算值在1.6~3.2范围之内。对应到f(x)中便是0~1的范围内需要转换,变换公式如下
lgx=lg(x×2k/2k)=lg(x×2k)-klg2
(10)
当x不在定义范围之内时,通过2的k次方加权使x×2k的值进入定义范围之内,计算x×2k的对数,再与常数-klg2进行和运算即可完成对定义范围之外的x求对数。例如lg0.5=lg(0.5×22/22)=lg(2)-2lg2,其中0.5不在范围之内,使用2的平方因子加权变换得到2即进入定义范围之内。如表1所示,根据AD的输入电压范围确定加权因子。
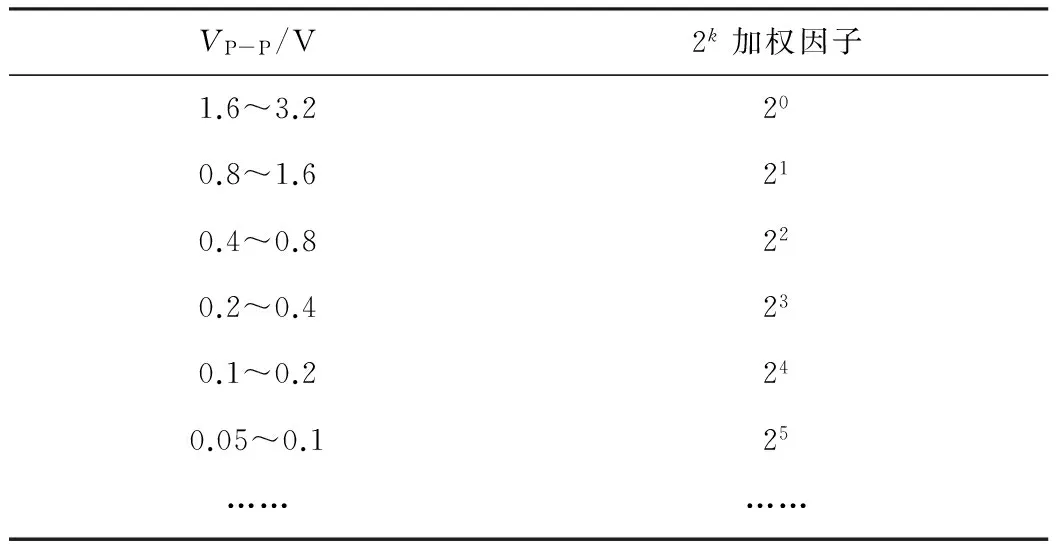
表1 关于k加权因子
当VP-P不在1.6~3.2 V范围之内时,加权后的值也需要映射至0~65 536,如式(11)所示。
(11)
式中:A为对数运算模块输入值;VP-P为信号电压值;M为A/D采样后的数字信号值;k为加权因子。
以VP-P=0.4 V为例,对信号进行功率估计的公式为PF=20lg0.4+R,即需要计算lg0.4,但是0.4不在算法的定义范围内,则需要用加权因子k=2变换lg0.4=lg(0.4×22/22)=lg(1.6)-2lg2,将计算lg0.4转变为计算lg(1.6),按照映射规则输入值A=0.6×65 536=39 321.6,根据式(11)由0.4 V的采样值M直接计算输入值A=0.4/2×216×22+1-216=13 107.2×22+1-216=39 321.6,结果也为39 321.6,可见转换公式的正确性。
综上所述,可将信号功率PF表示为:
PF=10lg(2.5)+20lgVP-P
(12)
PF′=10lg(2.5)+20lg(VP-P×2k)-20klg2+20lg1.6
(13)
进一步,
PF′=10lg(1.25)+(10-20k)lg2+20lg1.6+20lg(VP-P×2k)
(14)
PF′=[10(F1.25+20F1.6+(10-20k)×F2+20×F]/216
(15)
式中:F1.25、F1.6和F2分别是表1中1+x为1.25、1.6和2时的对数运算模块的输出值,当做常数处理;PF′为估计出的信号功率;F为采样信号映射值A输入对数运算模块的计算结果;k为加权因子。
以式(15)为基础,数字AGC实现流程图如图5所示。
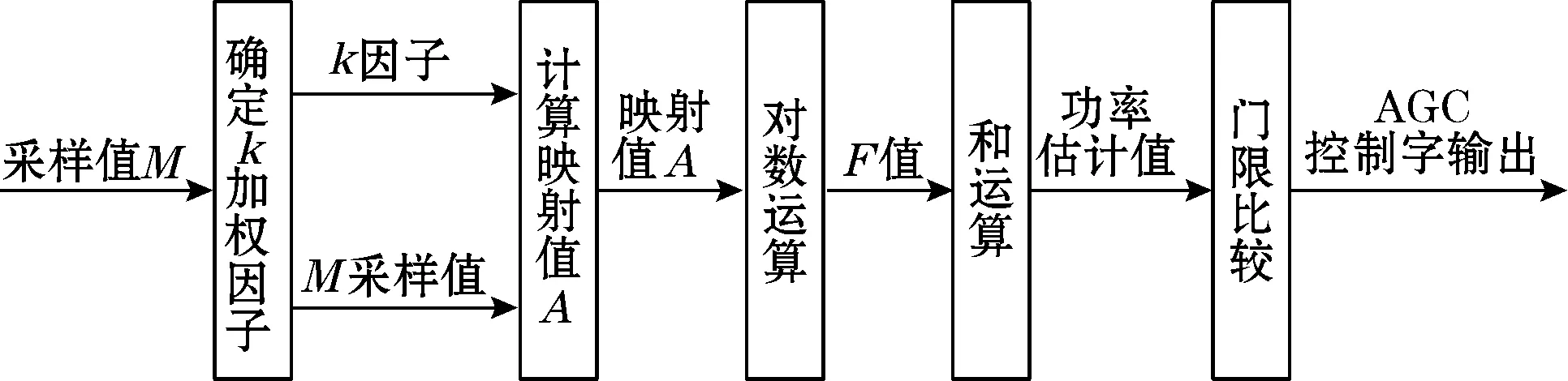
图5 数字AGC实现流程图
利用VERILOG HDL语言在FPGA中硬件实现数字AGC主要包括select模块和convert模块,select模块的功能即通过数字信号M确定k加权因子的值并输出给convert模块。convert模块则实现了映射值的计算、对数运算以及功率估计值的运算,然后通过和门限值的比较最终输出4位AGCWORD[3∶0]控制字来控制数字衰减器的衰减量。
4 结论
本文介绍了一种云闪定位系统中的数字AGC设计方案,给出了设计方案总体框图和各电路模块设计方法,并且详细介绍了基于切比雪夫逼近法的数字AGC功率估计算法以及AGC的实现流程。此设计主要用于调理云闪定位系统前端采集板采集到的云闪辐射信号,能够有效实现对云闪辐射信号的自动增益控制,并且可以将信号调整到适合A/D模拟输入的范围,实现了信号的大动态范围控制,使云闪定位系统的后端数字信号处理板能够顺利处理云闪电磁辐射信号。本设计完成了对云闪辐射信号的数字自动增益控制,为云闪定位系统的实现奠定了基础。
[1] 孙学金,王晓蕾,李浩,等. 大气探测学.北京:气象出版社,2009.
[2] 李云敏,孙秀斌,杨崧令,等. 云闪定位算法及误差分析.电子测量与仪器学报,2012,26(10):917-922.
[3] 刘艳萍,杨玉芝,崔朋朋.基于FPGA 的超声波气体流量计中AGC的实现.电子设计工程,2009,17(12):74-79.
[4] 李悦丽, 薛国义.雷达数字AGC技术的工程实现.电子工程师,2004,30(12):15-17.
[5] HITTITE MICROWAVE CORPORATION.HMC629LP4 /629LP4E.[2014-11-06].http://www.hittite.com/content/documents/data_sheet/hmc629lp4. pdf.
[6] ANALOG DEVICES.AD9446 Data Sheet[EB/OL].[2014-11-06].http://www.analog.com/media/en/data-sheets/AD9446 pdf.
[7] 贝耶尔. 数字信号处理的FPGA实现.3版.刘凌,译.北京: 清华大学出版社, 2011.
Design of Digital AGC in Cloud Lightning Location System
LU Zhou1,2,SUN Xiu-bin1,2,TANG Xin-yu1,2,XIAO Kun-feng3
(1.College of Electronic Engineering, Chengdu University of Information Technology, Chengdu 610225,China;2.CMA. Key Laboratory of Atmospheric Sounding-KLAS, Chengdu 610225,China;3.Chengdu Fourier Electronic Technology Co.,Ltd., Chengdu 610045,China)
In cloud lightning location system, the distance between cloud flash and antenna, the strength of the electromagnetic radiation and other factors can make the lightning radiation signals
by antenna instability. In order to make the electromagnetic radiation signals received by system maintained in a certain dynamic range, a kind of digital AGC system based on FPGA and digital attenuator was introduced, the overall design scheme of the hardware circuit and the design method of each part of the circuit were given, and the algorithm of digital AGC power estimation based on Chebyshev approximation method and the AGC algorithm implementation process were introduced in detail. The control of the cloud flash signal digital automatic gain was realized,thus providing a feasible scheme for digital AGC engineering implementation in cloud lightning location system.
cloud lightning location; digital automatic gain control; Chebyshev polynomial; FPGA; AD9446
四川省教育厅成果转化重大培育项目(13CZ0011)
2014-10-21 收修改稿日期:2015-03-03
TN911.7
A
1002-1841(2015)08-0096-04
卢舟(1990—),硕士研究生,主要研究方向为信号处理、雷电监测与预警。E-mail:494256382@qq.com
