基于航迹似然性的一体化目标跟踪算法研究*
2015-06-07郑润高陈金来梁东坡
郑润高 陈金来 梁东坡
(海军蚌埠士官学校 蚌埠 233012)
基于航迹似然性的一体化目标跟踪算法研究*
郑润高 陈金来 梁东坡
(海军蚌埠士官学校 蚌埠 233012)
针对目前大多数目标跟踪算法解决的只是目标跟踪过程(航迹起始、数据关联、航迹维持和航迹终止)中的部分问题,探讨了如何将目标跟踪的整个过程在一个算法中完整体现的可能性。通过研究,发现了航迹似然性这一有效参量,在此基础上提出了基于航迹似然性的一体化目标跟踪算法。在目标跟踪过程中,该算法通过航迹假设、利用航迹似然性参数能够及时发现新目标、较准确的关联数据、更新航迹、终止消失目标航迹。仿真结果表明,该算法能够实时地实现对杂波环境下雷达目标的一体化跟踪。
目标跟踪;一体化;航迹似然性
Class NumberTP274
1 引言
杂波环境下目标的跟踪需要解决一系列问题:包括航迹起始、关联数据更新航迹、相似航迹的融合以及消失目标航迹的终止。其中关联数据更新航迹这一环节是目前大多数目标跟踪算法所研究的对象。这类跟踪算法是建立在具有相关目标的先验知识(诸如目标个数、目标起始状态、目标出现及消失的时间等)的基础上的。但是在真实的对敌方目标的跟踪场景中,这些先验知识并不能先验地获得,这就要求在目标出现时及时地起始其航迹以及在目标消失后及时终止其航迹。因此,目标一体化跟踪算法显现出了一定的必要性。关于航迹起始、数据关联和目标跟踪[1~3]已经有了许多成熟的算法。其中,Reid提出的多假设跟踪算法[4](MHT)具备航迹起始、确认、维持、合并和终止的完整功能,是目前公认的最接近目标跟踪实际的算法。
目前MHT算法研究有两个方向:基于假设的处理方法和基于航迹的处理方法。两者的区别在于假设生成的方式,共同之处为使用K-best方法保留可能性最大假设,从而大大降低计算复杂度[5~6]。但是MHT算法仍然要求一定的先验性,并且算法的复杂程度较高,难于工程实现。通过对航迹起始、数据关联目标跟踪等现有算法的对比研究,提出了航迹假设概念、发现了航迹似然性参数,简化了一体化跟踪算法的理论实现过程。本文算法利用航迹似然性参数来检验航迹假设的合理性,结合卡尔曼滤波算法实现了杂波环境下目标的快速起始、跟踪和终止。仿真结果表明,该算法的跟踪时效性、准确性较高,具有一定的实际意义。
2 本文跟踪算法的一般步骤
在描述一般步骤之前,需要明确两点:跟踪目标首先要发现目标,所以本文一体化跟踪算法的第一步就是起始目标航迹。而实际情况是,目标的出现会有时间上的先后,这也就要求一体化跟踪算法必须考虑不同时刻目标的正确起始。这是第一点;与目标出现时间一样,目标的消失时刻也有所不同。因此第二点,即一体化跟踪算法必须及时撤销不同时刻消失目标的航迹。根据航迹的形成过程,本文提出的一体化跟踪算法可以分为以下几个步骤。
2.1 航迹起始
目标航迹的起始一般需要连续几个扫描周期(称为“滑窗”)的数据关联得到[1]。本文认为,一般杂波环境下的航迹起始分为两种情况。一种情况是雷达等设备开始扫描时,这时还没有形成航迹;另一种情况是在雷达扫描过程中,目标航迹已经形成,这时要起始新的目标航迹之前需要去除掉已有目标航迹的关联数据。本文算法中,航迹起始的过程如图1所示。
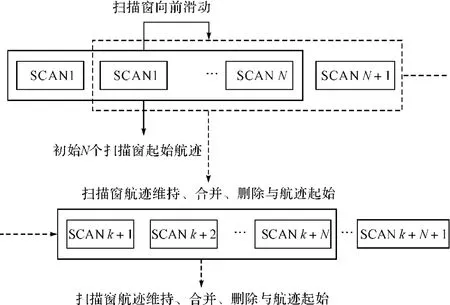
图1 一体化跟踪算法框架
航迹起始是一体化算法的关键。由于系统不具有目标的先验知识,本文航迹起始采用一般的穷举法,在滑窗内回溯滤波初始状态(本文选自“滑窗”大小为3:
回溯得到目标的滤波初始状态为:Xk-1=[x其中分别是相邻时刻的扫描量测值构成了一个“假设航迹”。由于穷举回溯必然会导致计算成几何倍数增长,而且穷举的量测组合中绝大部分不是真实目标,因此有必要从中找出真实目标(如果存在的话)。在没有目标先验知识的情况下,这个工作很难完成。但真实目标的航迹必然有其规律性,因此通过进一步的状态更新就可以将绝大多数非目标航迹消除掉。因此本算法的航迹起始只负责对“假设航迹”相应状态的建立,而假设航迹是否成立交由下一步的航迹维持更新来完成。
2.2 航迹维持更新
航迹维持更新通过与当前时刻量测值的数据关联来完成。包括两部分:
1)量测值是否处于跟踪波门内[3,7]:

其中vk=zk-zk|k-1,Sk=HkPk|k-1H′k+Rk。一条假设航迹的跟踪波门内不存在量测,原因可能是该假设航迹不是真实目标航迹,也可能是某一时刻真实目标没有被探测到(目标检测概率<1)[8]。但是如果目标连续三次都没有被检测到,则说明该目标已经消失或者该目标不是真实目标。这样相应的假设航迹就可以终止或者撤消了。2)更新目标状态:

其中滤波增益Kk=Pk|k-1H′k/(HkPk|k-1H′k)。
2.3 航迹合并融合
由于航迹的起始是通过穷举法实现的,因此跟踪过程中会有相似航迹(对应同一个目标)的出现,需要加以合并[9]。但是航迹的“相似”可以分成两种情况解读。
2.3.1 在目标航迹的起始阶段
如图2所示,{zk1,zk+2,…,zk+T}和{zk2,zk+2,…,zk+T}都可以起始为一条目标航迹,其中zk1和zk2是同一时刻的扫描量测。以上两条航迹指向同一个目标,而某一时刻一个目标只能有一个量测值,那么zk1和zk2之间可能就有一个不是目标的真实量测或者都不是目标的真实量测,如何将这两条航迹合并融合呢?合并融合时各占多少比重呢?这是一种情况。
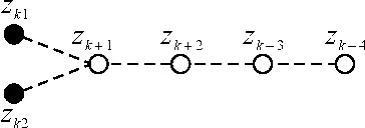
图2 航迹起始示意图
2.3.2 在航迹维持更新阶段
如图3所示,zk+4和z′k+4位于k+4时刻的航迹关联波门内,它们都可能是目标的真实量测。与PDA、JPDA[3,7,10]等算法的处理方法不同,本文算法将生成{zkzk+1zk+2zk+3zk+4}和{zkzk+1zk+2zk+3z′k+4}两条航迹。通过与后续的扫描量测关联来判断航迹是否成立:如果目标发生机动,那么{zkzk+1zk+2zk+3z′k+4}成立;如果没有,那么{zkzk+1zk+2zk+3zk+4}成立;如果这两条航迹后续的数据关联都相同,就存在两条相似航迹,这时将通过一个称为“航迹似然性”的参数实现取舍。2.4 航迹终止撤销
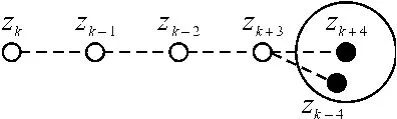
图3 航迹维持更新示意图
该环节用于撤销一些假航迹和航迹点相似但航迹似然性参数值很大的航迹、终止消失目标航迹。航迹终止撤销时会释放航迹关联的量测数据,因为可能属于其它目标的关联数据。
3 航迹似然性参数
本文算法的实现得益于航迹似然性这一参数。在算法实现中,从航迹起始开始每生成的一条航迹都有一个航迹似然性参数值。根据每条航迹的航迹似然性参数值,可以更好地实现航迹的合并融合、终止撤销等。该参数值的定义如下:

该参数来自航迹状态的新息及其协方差之比。从量测和目标角度看,如果关联量测都来自于同一个目标,那么最后滤波得到的航迹是最接近于目标真实航迹的其相应的航迹似然性参数值最小;如果关联量测序列中混有其它量测,那么滤波得到的航迹与真实目标航迹的相似性会低于前者,其相应的航迹似然性参数值越大。
因此在数据关联时,因为存在目标机动的可能,虽然新息及其协方差之比越小,不一定说明量测与目标真实量测越接近。但是目标不可能一直存于机动状态(即运动参数速度、加速度的快速变化),因此长时间来看,新息及其协方差比值的累加和这一数值越小,说明相应航迹越接近真实目标航迹。
4 仿真设计与分析
杂波环境中三个目标匀速运动态势如表所示。杂波虚警个数在整个监测区域服从泊松分布,密度为5*10-7个/m2,杂波量测值在监视区域内服从均匀分布。一体化算法采用卡尔曼算法作为基础滤波算法,运动模型为匀速运动模型,雷达扫描周期T=1s。量测噪声标准差为(50m,30m)。
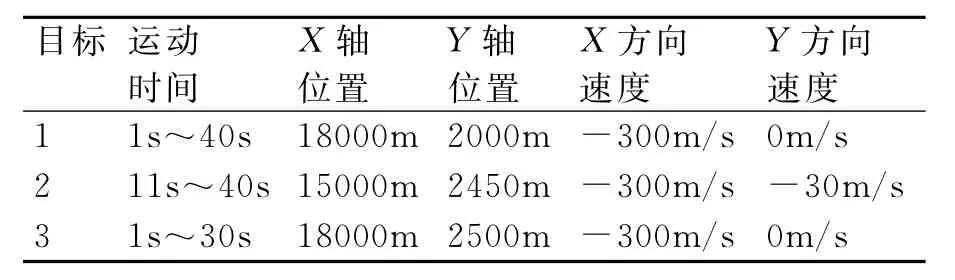
表1 目标初始运动态势
仿真效果图如图4所示。
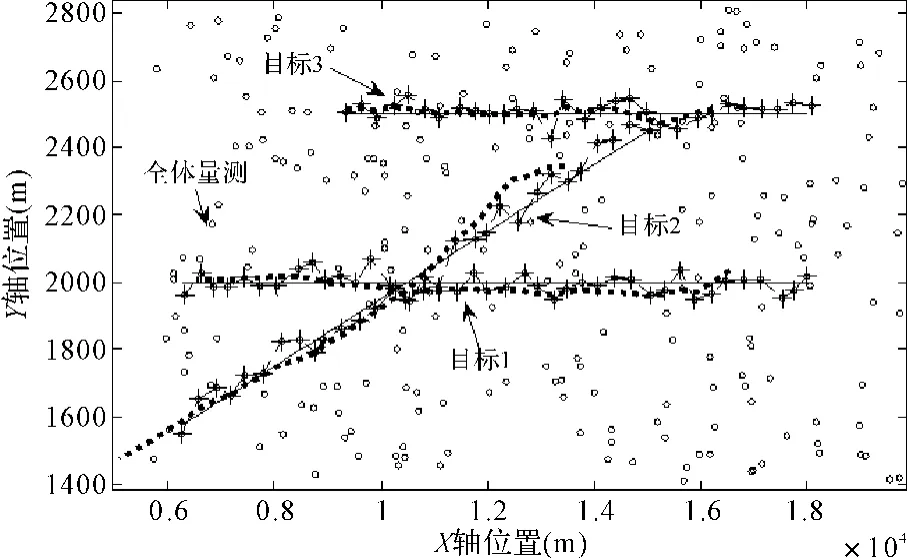
图4 本文算法跟踪随机目标效果
仿真结果分析:从图4~图5和表2可以看出,本文一体化算法对于场景中随机出现的多个目标具有较好的跟踪处理能力。但是目标航迹起始阶段的精度不高。首先航迹起始回溯滤波初始状态是由量测值关联得到的。量测本身有噪声,因此初始滤波状态与实际值具有一定的偏差,需要一定的调整时间,而调整时间的长短取决于所应用的运动模型的自适应能力。其次由于目标运动交叉的影响,该场景中目标的航迹似然性变化值较大,尤其是目标发生交叉前后。
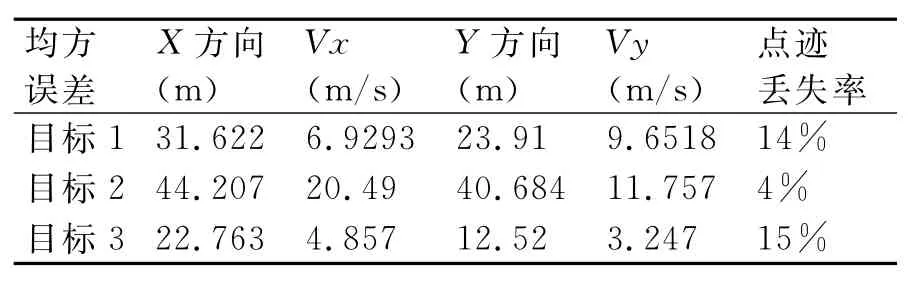
表2 随机多目标跟踪性能
5 结语
通过仿真发现本文提出的算法能够较好的实现杂波环境下多目标的一体化跟踪。在不具有任何目标的先验知识(包括出现的时间、出现时的状态等)的情况下,本文算法较好的实现了目标航迹的起始、维持更新以及终止。提出的航迹似然性参数较好地表征了目标航迹的真实性。但是对于杂波环境的处理能力还不够,存在点迹丢失比较严重的情况,对于交叉目标的跟踪能力不强,需要进一步提高算法的准确性。
[1]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006:56-58.
[2]Thiagalingam Kirubarajan,Y.Bar-Shalom.Probabilistic Data Association Techniques for Target Tracking in Clutter[J].Proceedings of the IEEE,2004,92(3):536-557.
[3]Y.Bar-shalom,T.Kirubarajan,X.Lin.Probabilistic Data Association Techniques for Target Tracking with Applications to Sonar,Radar and EO Sensors[J].IEEE A&E Systems Magazine,2005,20(8).
[4]Donald B.Reid,an Algorithm for Tracking Multiple Targets[J].IEEE Trans on Automatic Control,1976,21(1):101-114.
[5]Samuel S.Blackman.Multiple Hypotheses Tracking for Multiple Targets Tracking[J].IEEE A&E MAGAZINE,January,2004,19(1):5-19.
[6]R.Danchick,G.E.Newnam.Reformulating Reid's MHT method with generalized Murty K-best ranked linear assignment algorithm[J].IEEE Proc-Radar Sonar Navigation,2006,153(1):13-22.
[7]Kuo-chu Chang,Chee-Yee Chong,Yaakov Bar-Shalom.Joint Probabilistic Data Association in Distributed Sensor Networks[C]//IEEE TRANSACTIONS ON AUTOMATIC CONTROL,1986,AC-31(10):889-897.
[8]Yasushi Obata,Masayoshi Ito.Computation-time Reduction of Track Oriented Multiple Hypotheses Tracking[J].SICE July 2001,Nagoya,pp:282-287.
[9]苏峰,王国宏,何友.修正的逻辑航迹起始算法[J].现代防御技术,2004,32(5):66-68.
[10]Y.Bar-Shalom,Fred Daum,Jim Huang.the Probabilistic Data Association Filter[J].IEEE CONTROL SYSTEM MAGAZINE,2009:82-100.
Integrated Target TrackingAlgorithm Based on Track-probability
ZHENG Rungao CHEN Jinlai LIANG Dongpo
(Bengbu Navy Petty Office Academy,Bengbu 233012)
Aiming at the fact that most target tracking algorithms could resolve one or some of the problems of entire target tracking which includes track initiating,data association,track maintaining and track terminating,the paper discusses the probability of realizing the whole process of tracking in one algorithm.Through research,aparameter is found,which is named track-probability.On the basis of track-probability,the integrated target tracking algorithm based on track-hypotheses is proposed.While tracking targets,the proposed algorithm could detect new targets timely,associate data and update exactly and terminate tracks of disappeared targets.The simulation indicates that the algorithm could realize integrative track the radar targets in clutter in time.
target tracking,integration,track-probability
TP274
10.3969/j.issn.1672-9730.2015.11.012
2015年5月8日,
2015年6月27日
郑润高,男,硕士,讲师,研究方向:信号处理技术和卫星通信。
