某型舰载单轴旋转调制捷联惯导姿态角误差修正方法
2015-06-05周海渊赵李健王前学
周海渊,潘 良,赵李健,王前学
(中国卫星海上测控部,江阴 214431)
某型舰载单轴旋转调制捷联惯导姿态角误差修正方法
周海渊,潘 良,赵李健,王前学
(中国卫星海上测控部,江阴 214431)
某型舰载单轴旋转调制捷联惯导在航天远洋测量船进行了搭载试验,以成熟的某型平台式惯性导航系统为基准进行了性能比对分析,数据处理发现两者姿态角之差伴随着捷联惯导单轴旋转调制的角度存在较为明显的阶梯现象。捷联惯导数据误差源分析结果表明,单轴旋转平台不水平是引起上述现象的根本原因。针对上述情况,构建姿态角误差补偿数学模型,采用最小二乘拟合方法对相关系数进行了计算并修正了阶梯现象,最后采用随机数据对建模结果进行了再次验证。研究结果表明基于最小二乘拟合的修正方法,消除了旋转平台不水平对单轴旋转调制捷联惯导姿态数据的影响,为后续设备的改进提供了方向。
捷联惯导;单轴旋转调制;阶梯效应;姿态修正;最小二乘方法
航天测量船执行海上测控任务对目标实施外测定轨,惯性导航系统提供的姿态信息是影响其测控精度的关键因素。惯性导航系统分为平台式和捷联式两类,目前测量船以平台式惯导为主要设备。从惯性导航系统的发展现状可以看出,捷联式惯导经济实惠、体积小巧、标校方便、精度更高,已经逐步取代传统的平台式惯导成为多数应用领域的主流[1-3]。由于航天测量船对姿态角精度要求很高,使用单纯的捷联式惯导很难满足要求,而采用单轴旋转调制方案可有效提高捷联式惯导系统姿态角精度。
伴随着国内捷联惯导的迅速发展和海上测控任务对高精度姿态测量的需求,多个捷联式惯导生产单位在航天测量船进行了设备搭载试验。某型单轴旋转调制激光陀螺捷联惯导(以下简称SINS)搭载试验数据分析发现,其姿态数据误差存在与设备单轴台体旋转调制角度相关的阶梯现象。本文对该现象产生的机理进行了分析,针对性设计了合理的误差补偿方案。
1 捷联惯导搭载试验
本次搭载试验包括以下设备:某型SINS一套;某型双频GPS接收机一套,为SINS提供实时位置、速度、时间信息;某型平台式惯导(以下简称INS),为SINS提供姿态比对参考;某型光学经纬仪,为SINS提供航向比对基准。各设备安装示意图如图1所示。
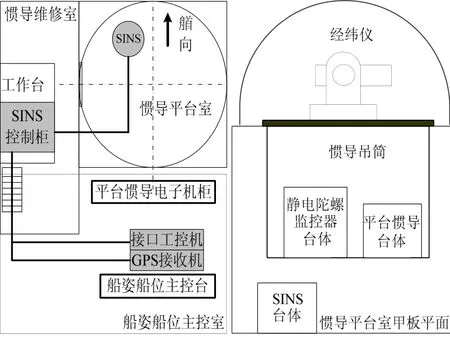
图1 捷联惯导搭载试验设备安装示意图Fig.1 The setting about SINS in the experiment
该型号SINS采用0°、180°、270°、90°四位置转停方案。将INS与SINS的姿态数据进行做差,结果如图2所示。从试验数据分析,不难得出INS与SINS姿态数据做差后存在与设备单轴台体旋转调制角度相关的阶梯现象。INS为已经成熟的设备,多次应用于海上测控任务,因此在姿态角做差比对中产生的上述现象应该与SINS本身有关。
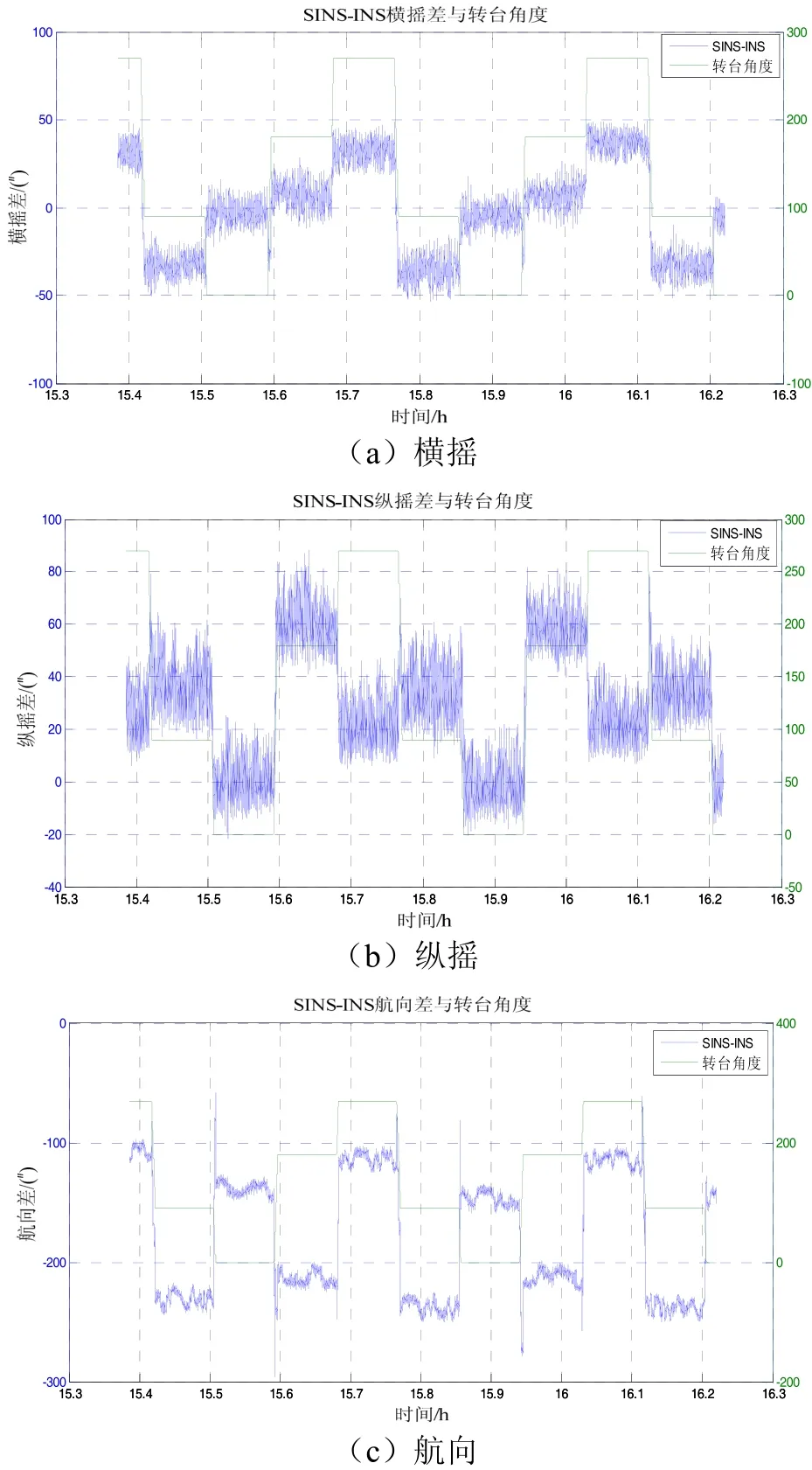
图2 SINS与INS姿态角做差结果Fig.2 Attitude data error of INS and SINS
2 捷联惯导姿态数据误差分析
2.1 捷联惯导姿态数据误差源
影响SINS测量精度的误差因素很多,大致可以分为四类:惯性器件误差、电路误差、机械误差和计算误差[4-6]。
① 惯性器件误差:惯性器件误差是指惯性器件本身的误差,包括激光陀螺和加速度计的零偏、比例因子、误差和随机噪声等。惯性器件误差通常是捷联惯导系统的主要误差。
② 电路误差:电路误差主要包括两个方面,一是陀螺和加速度电路的随机噪声引起的误差,二是信号处理电路进行量化处理产生的量化误差。该误差不会随时间积累。
③ 机械误差:机械误差主要包括陀螺仪、加速度计、单轴旋转平台安装等机械设备安装引起的误差。陀螺和加速度计误差可以通过标定补偿,单轴旋转平台安装误差也可以通过标定后补偿。
④ 计算误差:计算误差主要包括计算机有限字长引起的舍入误差和姿态解算算法误差。相对于其它误差而言,计算误差为小量。
本次SINS搭载试验选用的激光陀螺和加速度计性能稳定,精度较高,依据惯性器件误差、电路误差、计算误差的特性,不会引起INS与SINS姿态数据做差后存在明显的与转台角度相关的阶梯效应。由于姿态角误差与转台角度紧密关联,根据这一特殊现象,单轴旋转平台不水平应该是引起该现象的主要因素。
2.2 捷联惯导姿态数据误差与转台角度
该型号SINS台体转角的角度范围为0°~270°,SINS与INS姿态角的差值与转台角度关系如图3所示。从图3中可见,横摇差和纵摇差与转台角度表现出明显的三角函数特性;而航向差则除了与转台角度有某种三角函数关系外,还与转台的正转、反转有关,表现出一定的齿隙特性。
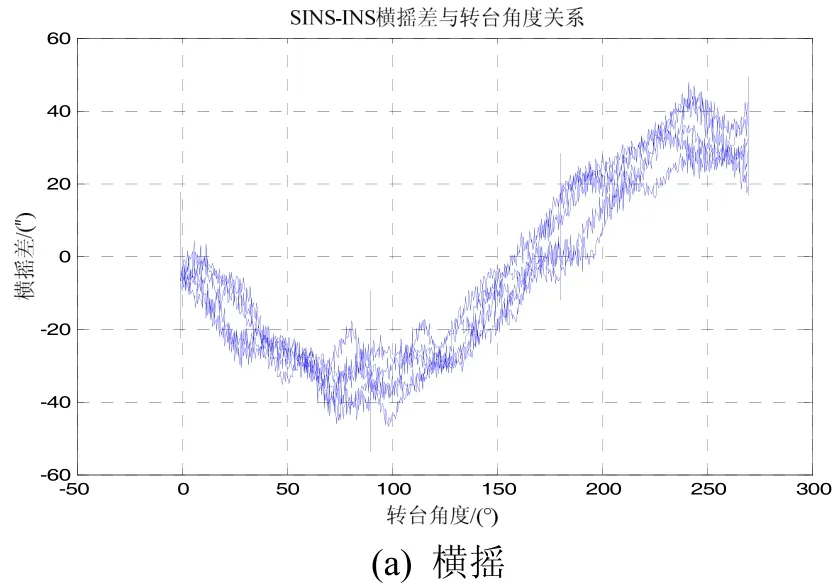
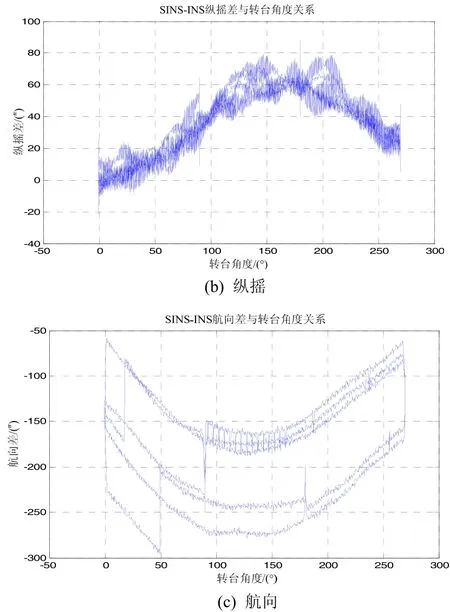
图3 INS-SINS姿态角差与转台角度关系Fig.3 INS-SINS attitude data vs. rotation angle of rotary platform
3 捷联惯导姿态数据误差补偿
3.1 水平姿态误差参数估计与补偿效果
根据图3(a)中的横摇差与转台角度曲线,按周期函数参数估计方法,可建立如下的误差补偿数学模型:

式中:ΔR为横摇误差,R0为曲线中的常值分量,AR为幅值,ΦR为初始相位。式(1)可改写为:

式中:aR=ARcosφR,bR=ARcosφR。对于式(2)只需要获取三个Kp对应的ΔR值即可确定R0、aR、bR三个参数;如果多于三个点,可采用最小二乘法拟合。
采用台体0°、180°、270°、90°四个转位的姿态角差平均值作为观察量,以R0、aR、bR作为待估参数写成矩阵形式:

式(3)的最小二乘解为:

采用同样的方法可以确定纵摇的三个参数P0、aP、bP,根据图2(a)、图2(b)中的曲线数据分别对横摇差、纵摇差曲线的参数估计结果见表1。
利用以上参数,对2(a)、图2(b)曲线中的数据进行误差补偿,结果见图4,从图中可见阶梯现象已消除。为了验证利用以上方法估计参数的普适性,对其它时间段SINS数据进行验证,效果良好,见图5。

表1 SINS水平姿态误差参数估计结果Tab.1 Horizontal attitude error correction of SINS
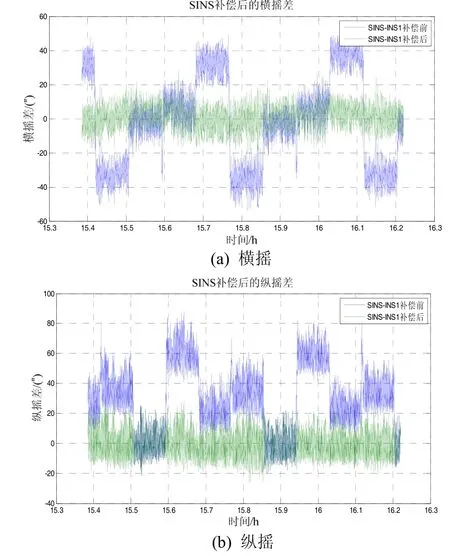
图4 补偿后的SINS姿态差误差曲线Fig.4 Horizontal attitude data after correction

图5 其它时间段SINS水平姿态误差补偿效果验证Fig.5 Horizontal attitude data after correction picked up by random
3.2 航向误差参数估计与补偿效果
对于航向数据,可以采用水平姿态角相同的方法进行参数估计。由于航天测量船使用经纬仪作为航向基准,采用INS作为水平姿态基准,因此SINS航向修正与水平姿态修正补偿略有不同,航向误差补偿参数中的常值分量没有实际意义不需要补偿。

表2 SINS航向误差参数估计结果Tab.2 Course attitude error correction of SINS
补偿后航向差曲线如图6(a)所示,阶梯现象已消失,但在转台旋转过程中的航向数据存在大小约40″的毛刺。分析发现毛刺方向与转台角速度方向相反,如图6(b)所示,利用转台角速度再乘一定系数对航向数据进一步补偿,效果如图7所示,毛刺和阶梯现象基本消失。
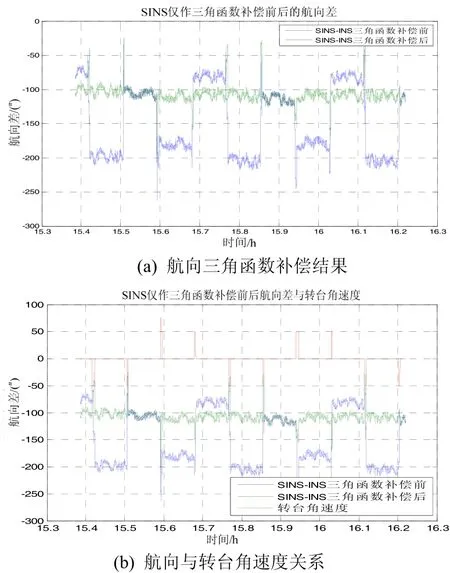
图6 SINS航向仅做三角函数补偿Fig.6 Course attitude data after trigonometric function correction
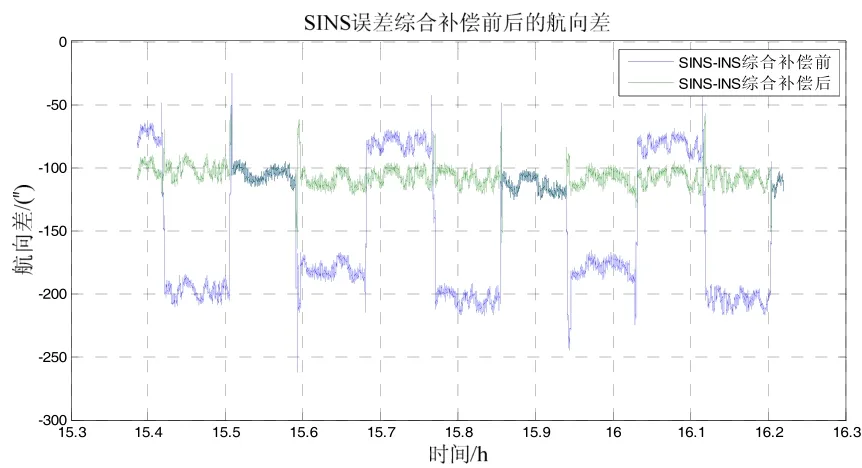
图7 SINS航向综合补偿效果Fig.7 Course attitude data after integrated correction
为了验证利用以上方法估计参数的普适性,对其它时间段SINS数据进行验证,效果良好,见图8。
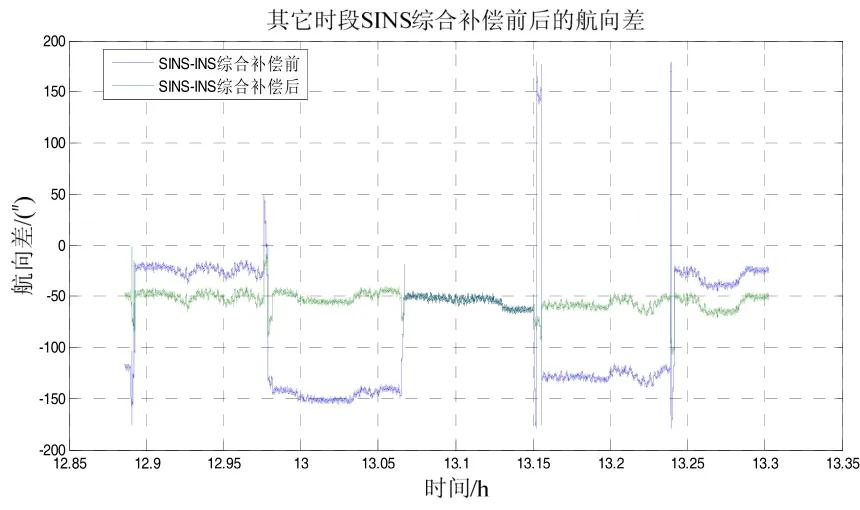
图8 其它时间段SINS航向误差综合补偿效果验证Fig.8 Course attitude data after correction picked up by random
4 结 论
从某型SINS搭载试验中发现,姿态数据误差存在与设备单轴台体旋转调制角度相关的阶梯现象,通过误差源分析SINS单轴旋转台体不水平是引起该现象的主要因素。本文在对姿态误差数据分析中发现,该误差与台体旋转调制角度存在特定三角函数关系。通过最小二乘拟合方法对数学模型各系数进行了计算并修正了阶梯现象,最后用随机数据对建模结果进行了再次验证。数据处理结果表明相关模型系数可以作为固定参数对该型SINS姿态数据进行修正。相关方法为该型设备的进一步改进提供了新的方向。
(References):
[1] 于飞, 翟国富, 高伟, 等. 舰船捷联惯导粗对准方法研究[J]. 传感器与微系统, 2009, 28(5): 15-18. Yu Fei, Zhai Guo-fu, Gao Wei, et al. Research on coarse alignment for vessel strapdown inertial navigation system [J]. Transducer and Microsystem Technologies, 2009, 28(5): 15-18.
[2] 龙兴武, 于旭东, 张鹏飞, 等. 激光陀螺单轴旋转惯性导航系统[J]. 中国惯性技术学报, 2010, 18(2): 149-153. Long Xin-wu, Yu Xu-dong, Zhang Peng-fei, et al. Single-rotating inertial navigation system with ring laser gyroscope[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 149-153.
[3] Nie Qi, Gao Xiao-ying, Liu Zhun. Research on accuracy improvement of INS with continuous rotation[C]// Proceedings of the 2009 IEEE International Conference on Information and Automation. 2009: 870-874.
[4] Cheng Jian-hua, Guan Dong-xue, Ben Xu-dong, et al. Design of simulation and verification system for rotation strapdowm inertial navigation system[C]//IEEE International Conference on Mechatronics and Automation. 2012: 865-869.
[5] Ben Yuei-yang, Wu Xiao. Research on error modulating of SINS based on single-axis rotation[C]//IEEE International Conference on Complex Medical Engineering, 2011: 293-297.
[6] Zhao Ling, Lai Ji-zhou, Liu Jia-ye, et al. Computation structure of rotating strapdown INS[J]. Journal of Chinese Inertial Technology, 2013, 21(1): 10-15.
Attitude error correction method for a shipboard single-shaft rotation modulation SINS
ZHOU Hai-yuan, PAN Liang, ZHAO Li-jian, WANG Qian-xue
(China Satellite Maritime Tracking & Controlling Department, Jiangyin 214431, China)
A ship-borne single-shaft rotary modulation SINS was tested on an aerospace oceangoing survey ship. By compared with a mature platform inertial navigation system, the data processing shows that the attitude errors have stepped behavior which is correlated with the SINS single-axis rotary modulation angle. The analysis on the error source of SINS data shows that it is due to the single-shaft rotary platform’s non-level. Then an attitude angle error compensation mathematical model is constructed, the correlation coefficient is calculated based on least square method, and the step phenomenon is corrected. Finally, the model is re-verified by using the random data. Experiment results show that the proposed method can eliminate the influence of single-shaft rotary platform’s non-level on the SINS attitude data, which provides a new way to improve the equipment’s performance.
SINS; single-shaft rotation modulation; step effect; attitude correction; least square method
U666.1
A
1005-6734(2015)02-0156-04
10.13695/j.cnki.12-1222/o3.2015.02.004
2014-08-20;
2014-12-17
周海渊(1982—),男,工程师,从事惯性导航设备应用研究。E-mail:lynn9527@gmail.com