不同结构绝对光栅尺的误码机制研究
2015-06-01韦青海房飞宇
韦青海,陈 新,刘 强,王 晗,陈 彬,房飞宇
(1.广东工业大学 机电学院 广州510006;2.广东省微纳加工技术与装备重点实验室 广州510006)
引言
光栅尺广泛运用于精密仪器设备[1-2],它的精度对全自动设备发挥着非常重要的作用[3-4]。就功能而言,光栅尺分为增量式和绝对式,随着科学技术的发展,绝对式光栅尺具有越来越大优势,因为绝对尺具有增量式光栅尺所没有的优点:上电后直接得到当前位置信息,无需“归零”操作,简化了控制系统设计;绝对位置在读数头中完成,无需后续细分电路;采用双向串行通信技术,通信可靠[5]。但是绝对尺昂贵的价格和粗大的结构尺寸,还不能够广泛运用于自动化[6]。因此绝对光栅尺技术有待进一步研究。
基于增量光栅尺原理,传统绝对式光栅尺原理一般采用多码道技术,利用感光二极管接收绝对码信息[7]。区别于传统技术,目前已有相当多的研究单位使用图像识别传感器的方法来获取绝对位置[8],而图像识别技术使得单码道技术得以实现,那么对图像进行再细分时就不会对绝对位置造成干扰[9]。图像识别绝对光栅尺经常采用基于CCD像素数的变化来记录绝对位置的变化[10]。本文使用FPGA驱动CMOS摄像头采集绝对码道的图像信息,FPGA采集方法比传统方法更具有稳定性[11]。就绝对式光栅尺结构而言,其分为开放式绝对式光栅尺和封闭式绝对光栅尺。两者的工作原理相同,只是结构有所不同,因此性能也有所差异。近来很多研究已经把光栅尺本身误差当做测量误差来源来研究[12],尽管有很多相关单位都在研究绝对位置测量原理,但是很少深入研究绝对光栅尺的测量误差及错误[13]。
本文以基于CMOS图像识别的开放式和封闭式绝对光栅尺作为研究对象,通过大量对比实验,并结合相应理论,研究不同结构性能对图像识别绝对光栅尺造成的误差和误码特点。
1 绝对光栅尺原理
早期光栅尺为增量式光栅尺,普遍采用摩尔条纹原理。随着超精密工业发展以及测量技术要求越来高,绝对光栅尺能检测绝对位置,开机无需复位找零,因此具有更大的实用优势。绝对式光栅尺利用编码方法来识别绝对位置,传统绝对式光栅尺一般基于摩尔条纹的多码道技术,利用感光二极管采集编码信息,最终输出绝对位置。随着科学技术的发展,图像拍摄技术、数据采集速度和数据处理速度得到很大提高,因此利用图像识别传感器的方法来获取绝对位置是一种趋势。
基于CMOS图像识别绝对光栅尺的关键部件:刻有绝对码的单码道光栅面板、金相物镜、CMOS摄像头、驱动CMOS的FAGA模块,进行数据处理的DSP模块。其获取绝对位置的方法与传统的原理截然不同。金相物镜将光栅面板上的绝对码放大,FAPGA驱动CMOS摄像头直接拍摄放大后的绝对码图像,DSP模块对FPGA采集到的图像信息进行数据处理,并将绝对位置以数字信息显示在显示屏上。基于CMOS图像识别绝对光栅尺原理系统流程如图1所示。
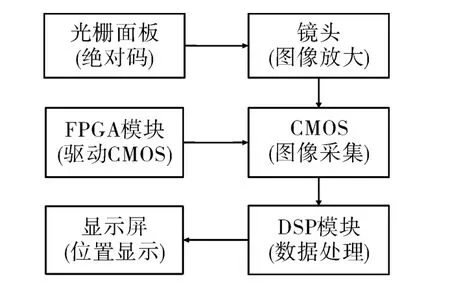
图1 图像识别绝对光栅尺原理系统流程图Fig.1 Working flow chart of image identification absolute grating scale
区别于传统式摩尔条原理光栅尺,基于CMOS图像识别绝对光栅尺只有主光栅,无需指示光栅。使用一个金相物镜直接将光栅面板上的绝对编码放大,放大后的绝对码图像摄入CMOS摄像头,为图像采集系统提供位置信息。光学放大系统使用金相物镜,具有放大后成像距离为无穷远的优点,可在任意位置观测到放大后的图像,因此利于摄像头抓获放大后的成像,同时也提高其动态防抖性能。背光源为平行光,以降低光源造成光学干涉,提高成像质量。基于CMOS图像识别绝对光栅尺的光路系统如图2所示。

图2 光路系统Fig.2 Light path system
FPGA模块驱动CMOS摄像头采集到瞬间位置码段,并将此位置图像信息传递给DSP模块,DSP模块根据事先编写的相应解码程序解读图像信息进行快速数据处理,得出当前的绝对位置信息,并将其转化为数字信息显示到显示器上。
2 误码分析
传统绝对光栅尺通常采用格雷编码方法,不同的码道刻线组成代表着不同的二进制代码,每一代码对应着独一无二的绝对位置。本文采用单码道技术,由伪随机排列的“黑白”序列构成绝对码道,这种序列每连续n位代表一个绝对位置,相邻的n位序列共享(n-1)位序列。
基于CMOS图像识别绝对光栅尺的位置表达可用下式来描述:

式中:Mx是绝对位置值;Nx是里程碑绝对编码值;K是光栅细分的增量值;B是相邻光栅线之间的细分增量值;d、δ、σ是相应值的权重参数,常数20为金相物镜的放大倍率。绝对码的编码片段如图3所示,不同的码带宽度对应不同的二进制编码,代表着不同的位置信息,采集系统采集到编码图片信息后,经过数据处理模块,转换为数字信息,完成绝对位置的读数。

图3 绝对光栅编码片段Fig.3 Code segment of absolute grating
工作环境中,存在振动现象,金相物镜与光栅面板之间、CMOS摄像头与金相物镜之间的距离发生变化,金相物镜的成像系统发生光学变化,以及运动时CMOS摄像头拍照产生拖影,致使对绝对码解码困难甚至出错,影响了解码的速度以及准确性。
1)金相物镜与光栅面板之间的距离发生变化。金相物镜浮动于光栅面板上,金相物镜景深很小,约为L=80μm,振动影响时,设金相物镜的工作面与光栅面板间距离变化值为Δd,如果跳离景深范围(Δd>L),那么图像将会很模糊甚至看不清,必然不能为DSP模块提供准确有用的相应二进制图片信息,如图4所示。对应于公式(1),得不到相应的Nx值,而Nx是绝对位置Mx的主要值;同时,因为跳离景深范围,所以拍摄的照片模糊甚至看不到,因此光栅线边沿分界线模糊不清,也引起光栅线宽度、相邻光栅线之间的宽度发生变化,不利于光栅细分增量值K、相邻光栅线之间细分增值B的准确获取。绝对光栅尺与增量式光栅尺的工作原理存在一定差异,对增量式光栅尺而言,振动致使光栅计数错乱,只会引起小范围的误差,其测量原理是累加计数,存在累计误差;对绝对光栅尺而言,其测量原理不是累加计数,每一段代码都有相应的独一无二的绝对位置,不存在累积误差,如若发生错误解码,就得不到相应的绝对代码值Nx,直接显示错位位置信息。
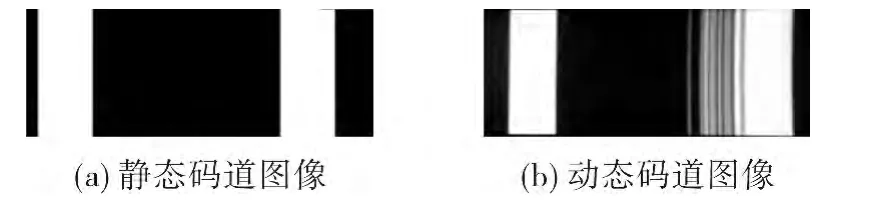
图4 静、动态码道图像比较Fig.4 Comparison of code segments between static and dynamic states
2)CMOS摄像头与金相物镜之间的距离在振动情况下会发生变化,同样也会引起类似上述的后果,但其影响因子比较小。因为CMOS摄像头与金相物镜之间的连接为固定的刚性连接,受振动影响产生而产生的形变量很小;金相物镜放大后所形成图像的可视范围为无穷远。
3)金相物镜的光学成像系统发生变化。金相物镜由复杂的光学镜组组合而成,受振动影响时,导致图像的畸形。图像畸形,放大后图像的光栅、相邻光栅间隙的实际宽度必定差别于理论值,直接引起(1)式中K、B值变化。如果畸变程度严重,有可能会引起编码的解码出错,那么(1)式中Nx值变化,此时的绝对位置值是错误的,是没有意义的。
4)对CMOS摄像头本身而言,由于拍摄帧频限制,发生振动时,容易造成对图像信息没有完整抓获。随着使用时间的增长,CMOS发热量增加,图像的拍摄质量也随之下降,严重时可能导致解码出错,而出现绝对位置报告出错。
3 开放式与封闭式的比较分析
与传统的光栅尺一样,基于CMOS图像识别的开放式与封闭式绝对光栅尺的工作原理完全相同,关键零部件都一样。由于安装环境的不同,导致其结构有所相异。
对于开放式而言,安装环境比较理想,污染源少,无需作防污染措施。开放式绝对光栅尺只有读数头以及光栅面板两部分,并且两者分别独立安装在机床的固定部分与运动部分,不存在任何连接。影响误码率的主要因素是机床导轨的性能,且振动是通过机床分别作用在读数头与尺身。
对于封闭式而言,安装环境比较恶劣。为防止污染源对光栅污染和破坏,必须设计有封装尺壳,如图5所示。封闭式比开放式增加很多零部件,同时也增大了绝对光栅尺的误码率。金相物镜和CMOS摄像头是绝对光栅尺扫描头的关键部件,类似传统增量式光栅尺的指示光栅、光电二极管以及相关电路组成的扫描头。封闭式绝对光栅尺的基本技术要求:保证金相物镜工作面与光栅面板之间的距离,读数头依靠辅助滑轨安装在绝对光栅尺尺壳上;金相物镜固定在滑车上,借助滑轮紧贴在光栅面板上平行滑动,CMOS摄像头安装在金相物镜的另一端,利用读数头-滑车连接板和滑车压紧弹簧将滑车与读数头之间实现柔性连接,保证读数头紧贴在光栅面板上平行滑动,降低振动的影响。
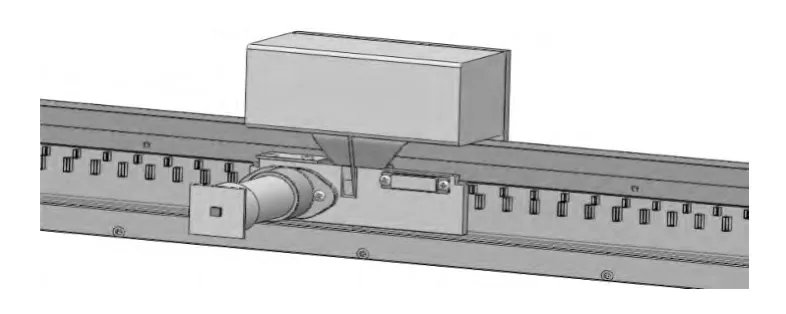
图5 封闭式绝对光栅尺结构示意图Fig.5 Structure of sealed absolute grating scale
4 实验设计
根据上述分析,振动环境下,基于CMOS图像识别绝对光栅尺的误码率更高。开放式绝对光栅尺与封闭式绝对光栅尺具有不同的结构特点和性能。在相同环境下,以相同的驱动速度进行对比实验。基于CMOS图像识别绝对光栅尺完全依靠对图像进行解码得到绝对位置,因为拍摄速度及解码速度的局限性,实验以本绝对光栅样尺的最高速度2mm/s进行。使用直线电机ArotechABL1500作为动力驱动源和参考对象,整个实验在光学隔振平台上进行,受外界影响很小。
ArotechABL1500使用气浮导轨技术,属于超精密仪器,具有高稳定性和低振动特点,分辨:±12nm;精度:0.05μm;重复定位精度:0.02μm;直线度0.1μm。为确保其高精度,以免对实验的造成干扰,使用激光干 RENISHAW XL-80对ArotechABL1500进行校核。主要是验证直线电机的重复定位精度,ArotechABL1500的行程为100mm,验证实验每间隔2mm分别记录激光干涉仪和ArotechABL1500的读数,对比数据以验证定位精度。验证结果如图6所示,由检测结果显示ArotechABL1500的定位精度在3μm以内,因此,后面的开放式、封闭式绝对式光栅尺实验直接以ArotechABL1500的读数为基准。

图6 ArotechABL1500直线度和定位精度验证校核Fig.6 Straightness and positional accuracy check of ArotechABL1500
开放式试验。在光学隔振平台上搭建基于CMOS图像识别开放式绝对光栅尺实验平台,如图7所示。光栅面板固定在ArotechABL1500滑动台上,与其同步运动,作为光栅尺的可动部件;扫描部件(金相物镜、光源、CMOS摄像头)依靠3坐标可调整的夹紧装置固定在光学隔振平台上,作为绝对光栅尺的固定部分;CMOS摄像头的驱动模块FPGA和数据处理模块DSP封装于同一封装盒内,用数据线将其与CMOS摄像头连接好,置于光栅尺外部;用引线将显示器与封装盒之间连接好。
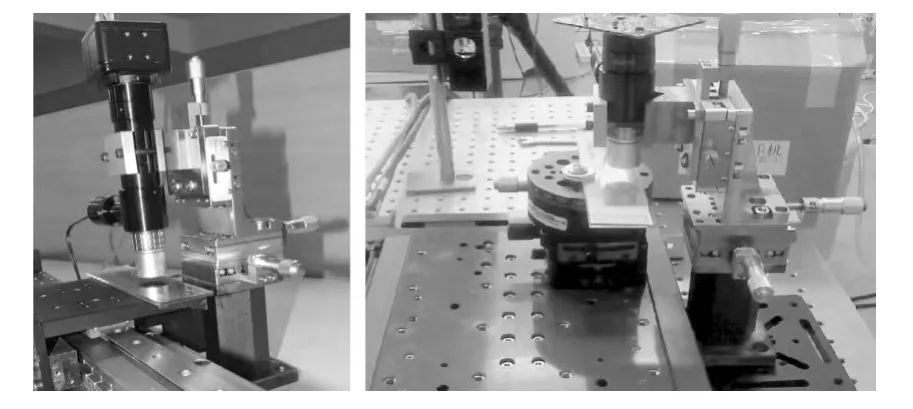
图7 图像识别开放式绝对光栅尺实验Fig.7 Experiment of unsealed image identification absolute grating scale
封闭式实验台。在相同实验环境下,在光学隔振台上搭建基于CMOS图像识别封闭式绝对光栅尺实验平台,如图8所示。由于FPGA板和DSP板的尺寸比较大,因此封闭式绝对尺的零部件只包括光栅面板、金相物镜、光源、CMOS摄像头。金相物镜安装在滑车上,依靠滑轮和弹簧压紧装置保证期与光栅面板码道间的工作距离,CMOS摄像头安装在金相物镜的另一端,光源为背光源,因此该绝对尺为为透射式绝对光栅尺。滑车通过连接板和压紧弹簧与读数头进行柔性连接,形成一个同步运动的整体。尺身安装在光学隔振平台上,作为绝对光栅尺的不动部分;读数头与Arotech-ABL1500的滑动台固定连接,两者同步运动。
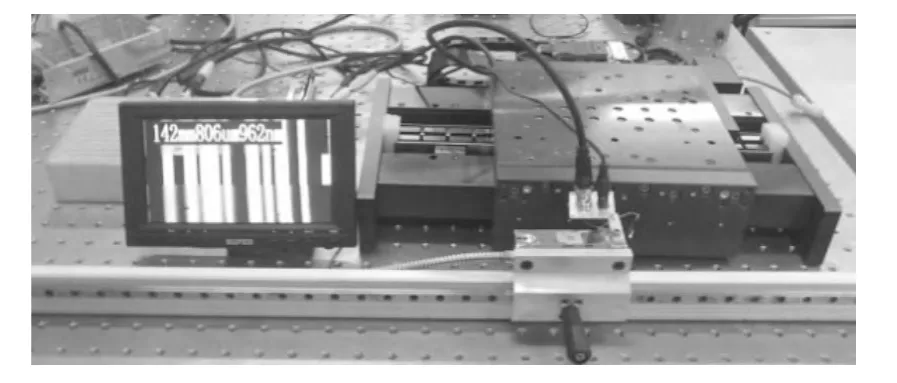
图8 图像识别封闭式绝对光栅尺实验Fig.8 Experiment of sealed image identification absolute grating
2个实验在ArotechABL1500直线电机速度为2mm/s下进行,步进为2mm时记录一次位置数据,最后根据基于CMOS图像识别绝对光栅尺与ArotechABL1500直线电机的读数,分析开放式与封闭式对基于CMOS图像识别绝对光栅尺误码率的影响。
5 实验结果与分析
上述的开放式绝对尺实验与封闭式绝对尺实验所使用的关键零部件皆相同,即光栅尺面板、金相物镜、CMOS摄像头、FPGA图像采集板、DSP数据处理板都相同。测出的实验数据如图9所示。根据实验数据可知,在没有出现误码的情况下,开放式绝对光栅尺和封闭式绝对光栅尺的精度都能与ArotechABL1500的精度匹配,但是封闭式比开放式出现误码的概率更高。由上述的误码理论分析可知,因为封闭式绝对光栅尺的金相物镜和CMOS摄像头安装在滑车上,所以滑车对封闭式绝对光栅尺性能产生很大的干扰影响。相对于开放式绝对光栅尺,封闭式绝对光栅尺的稳定性不仅受直线电机导轨性能的影响,更多的是滑车装置的影响。正如本实验所使用的直线电机ArotechABL1500的稳定很高,开放式绝对光栅尺的误码率就会很小;对于封闭式绝对尺,当其工作时,金相物镜和CMOS摄像头依靠滑车在光栅面板上平行滑行。因此,光栅面板的平面度、粗糙度、滑车滑轮的匀称度以及滑轮的稳定性将决定COMS所能拍摄到图像的准确性。

图9 实验结果Fig.9 Experiment result
在允许的测量速度范围内,对应于公式(1),绝对位置值主要取决于Nx,Nx是对图像采集系统采集到的编码信息而解出的位置信息。在某一瞬间,由于结构系统的不稳定,致使图像采集系统所采集到的编码信息不准确。比如当滑车晃动时,金相物镜的工作面与光栅面板的距离发生变化,那么导致采集到的图像会脱离预期值,因为距离的远近将会影响CMOS的可视范围[10],最终引起码道信息错误而导致位置信息的错误,如图4(b)所示,因为成像系统的不稳定性,导致图像边缘的变化而引起码道信息的变化。这与增量式光栅尺产生的误差有所不同:增量式光栅尺依据累加技术测量原理,会出现小范围之内误差且存在累计误差;而绝对光栅尺每段编码信息对应的是独一无二的绝对位置信息,因此发生误码时,显示的位置信息是完全错误的,与实际位置信息偏差非常大,这点在图9所示的实验数据是显而易见的,但绝对光栅尺没有累计误差。对于公式(1)中的K、B值主要是细分技术计算值,因此两者出现偏差时是造成绝对位置信息小范围误差,而不会造成误码。
6 结论
基于COMS图像识别绝对光栅尺,开放式光栅尺与封闭式光栅尺的工作原理相同。封闭式光栅尺的结构比开放式绝对光栅尺复杂,降低了结构的稳定性,因此封闭式绝对尺增加了自身的干扰。绝对光栅尺的每一位置对应独一无二的绝对编码,一旦出现了误码,那么其所检测到的位置是完全错误的。因此,封闭式绝对光栅尺的误码率更高,开放式绝对光栅尺的误码率为3%,封闭式绝对光栅尺的误码率高达8%。随着高科技的发展,绝对光栅尺在精密领域发挥着越来越重要的作用,封闭式绝对光栅尺是市场的必须品。同时,随着信息技术迅速发展,图像误别绝对光栅尺具有非常乐观的发展前景。因此,对图像误别绝对光栅尺的研究具有一定的意义。
[1] Reboud V,Leveque G,Kehoe T,et al.Enhanced extraction efficiency in nanoimprinted light emitting structures mediated by plasmon-exciton interaction[C].USA:IEEE,2011.
[2] Li X H,Gao W,Muto H,et al.A six-degree-offreedom surface encoder for precision positioning of a planar motion stage[J].Precision Engineering,2013,37(3):771-781.
[3] Jie Degang,Liu Yanjie,Sun Lining,et al.A high speed and high precision displacement measurement method using double grating scales[J].Optics and Precision Engineering,2007,7:013.
[4] Chen Yun,Zhang Hongsheng.Oding modes of photoelectric shaft encoders and their developing trend[J].Chinese Journal of Optics and Applied Optics,2009,2(2):126-133.陈赟,张红胜.光电轴角编码器的编码方式及其发展趋势[J].中国光学与应用光学,2009,2(2):126-133.
[5] Deng J,Lin H.Motor velocity measurement by absolute optical encoder based on DSP [J].Electric Machines &Control Application,2010,1:14.
[6] Sugiyama Y,Matsui Y,Toyoda H,et al.A 3.2kHz,14-bit optical absolute rotary encoder with a CMOS profile sensor[J].Sensors Journal,2008,8 (8):1430-1436.
[7] Engelhardt K,Seitz P.Absolute,high-resolution optical position encoder[J].Applied Optics,1996,35(1):201-208.
[8] Wan Qiuhua,Wang Yuanyuan,Sun Ying,et al.A novel miniature absolute metal rotary encoder based on single-track periodic gray code[C].USA:IEEE Computer Society,2012:399-402.
[9] Kim J A,Kim J W,Kang C S,et al.An optical absolute position measurement method using aphaseencoded single track binary code[J].Review of Scientific Instruments,2012,83(11):115.
[10]Hsu C C,Lu M C,Wang W Y,et al.Distance measurement based on pixel variation of CCD images[J].ISA Transactions,2009,48(4):389-395.
[11]Xia Yuqin,Zhang Yong.Grating-ruler signal based on FPGA[J].IEEE,2010,1:422-424.
[12]Lopez J,Artes M,Alejandre I.Analysis of optical linear encoders'errors under vibration at different mounting conditions[J].Measurement,2011,44(8):1367-1380.
[13]Sun Qiang.Progress and technical features of absolute grating with high precision[J].The Manufacturing Technology and Equipment Market,2012 (5):72-73.孙强.高精度绝对式光栅尺研究进展及技术难点[J].世界制造技术与装备市场,2012(5):72-73.
