自行高炮炮长瞄准镜动态观瞄装置
2015-06-01李勤学何玉兰柴继河陈秀萍
李勤学,何玉兰,王 涛,柴继河,闫 丽,陈秀萍,强 华,张 莹
(西安应用光学研究所 ,陕西 西安710065)
引言
在自行高炮武器系统中,火炮伺服系统是重要功能单元,它接受火控系统指令使火炮完成调转、跟踪、提前等运动[1]。其可靠性随着技术的进步不断提高,但由于系统复杂及作战受损,故障发生的可能性不容忽视。为使火炮伺服系统发生故障后,武器系统仍具有一定战斗力,许多自行高炮设置应急手段,在火炮伺服系统发生故障后以应急方式工作[2-3],使火炮完成调转、跟踪、提前等运动。采用光环瞄准镜观察、搜索,手动使瞄准线与火炮完成调转、跟踪、提前,这是主要应急手段之一。但这种手段存在反应速度慢、对准精度低、到达提前位置误差大的问题。动态观瞄装置产生含有光标的视频信号,通过实时接收目标或火炮提前量数据,解算并控制视频信号中光标动态位置。该视频信号经微显示器显示并被投影到瞄准镜分划面上[4-5],使动态光标出现在瞄准镜视场中,应急工作时引导炮长以手动方式使瞄准线及火炮快速调转、跟踪、快速到达提前位置。从而减轻操作难度、提高调转速度,利于抓住战机,提高命中概率。
1 光环瞄准镜工作方式及原理
采用光环瞄准镜为应急手段的自行高炮按伺服系统状况有两种工作方式:
1)自动方式(主要方式,火炮伺服系统正常工作方式)。以雷达或光电系统搜索、捕获、跟踪目标[6-7],目标信息经火控计算机处理发往火炮伺服系统,驱动火炮调转并跟踪目标[8],目标进入射程后,火控计算机解算提前量,驱动火炮到达提前位置后射击。
2)手动方式(应急方式,火炮伺服系统发生故障后工作方式)。雷达或光电系统搜索、捕获、跟踪目标,炮长间接接收雷达或光电系统指示,通过光环瞄准镜观察、搜索,以手动方式调转火炮、跟踪目标。目标进入射程后,目测其方向、速度、距离,估算提前量[9],手动使火炮到达射击提前位置后射击[10-11]。
图1是光环瞄准镜光学原理图。其光学系统由保护窗1(采用冕玻璃)、端部棱镜2(采用重火石玻璃)、物镜组3(采用冕玻璃、火石玻璃)、五棱镜4(采用冕玻璃)、分划板5(采用冕玻璃)、目镜6(采用冕玻璃、火石玻璃)组成[12]。光环瞄准镜安装在炮塔上,其瞄准线方位随镜体及炮塔运动,俯仰由端部棱镜驱动随火炮身管同步运动。因瞄准线始终平行火炮射线,因而这种光环瞄准镜属于非独立瞄准线瞄准镜。

图1 光环瞄准镜光学原理图Fig.1 Optical schematic diagram of optical ring sight lens
图2 是光环瞄准镜分划板原理。光环瞄准镜分划面刻制若干同心环,称为“光环”,其半径由目标典型速度、典型距离、弹丸飞行时间及物镜组焦距计算,标识瞄准线典型提前角。光环中心为瞄准线零位,对目标跟踪好时与目标重合。应急工作时,炮长目测目标速度、距离后选择相应光环,并选择其与目标运动方向相反、与所需提前位置(图2*号位置)对称的部位对准目标,使瞄准线和火炮到达提前位置,如图3所示。
这种光环瞄准镜具有与火炮射线同轴、视场大、分辨率高、可靠性好、使用方便、抗电磁干扰等特点。许多自行高炮除配装雷达或独立瞄准线光电系统外,仍然配置光环瞄准镜进行观瞄、搜索,应急工作时带动火炮捕获、跟踪目标,击毁目标。

图2 光环瞄准镜分划板原理Fig.2 View of reticle surface of ring sight lens

图3 光环瞄准镜瞄准线到达提前位置Fig.3 View of reticle surface while LOS in lead position
然而这种瞄准镜在应急工作时存在以下不足:
1)不易利用火控系统给出的提前量。仅依靠目测目标方向、速度和距离概估提前量,选择光环及光环部位对准目标,使瞄准线和火炮到达提前位置。
2)代表典型目标速度和距离的光环数量有限,光环参数与目标实际速度及距离有差距,所选光环部位与目标方向有误差,因而使瞄准线和火炮到达提前位置的误差大,导致命中概率低[13]。
3)炮长依靠目测进行判断并手动操作,脑力和体力工作强度大、熟练程度要求高,使瞄准线和火炮到达提前位置速度慢、误差大,设计命中概率不高,且易丧失战机。
2 动态观瞄装置原理
2.1 动态观瞄装置组成及原理
针对以上问题,我们为炮长瞄准镜设计了一种以动态光标指示目标方向及提前量的装置,应急工作时可使目标快速进入视场,使瞄准线和火炮快速、准确到达射击提前位置。
组合在炮长瞄准镜中的动态观瞄装置如图4所示,包括动态光标电路板7、微显示器8、投影光学系统9(采用镧冕玻璃、镧火石玻璃)、分光棱镜10(采用冕玻璃)和警示灯11。
该瞄准镜观瞄光学系统与传统光环瞄准镜类似,包括保护窗1、端部棱镜2、物镜组3、五棱镜4、分划板5和目镜6,目标经观瞄光学系统成像在分划板上。投影系统将显示器图像经分光棱镜也放大到分划板上。观瞄系统光路和投影系统光路通过分光棱镜后汇合,其像面在分划面重合,经目镜供炮长观察。
动态光标电路板集成了通讯电路、光标位置电路、光标生成电路、视频信号发生电路和视频混合电路。

图4 含动态观瞄装置的瞄准镜光学原理图Fig.4 Optical schematic diagram of sight lens with dynamic cursor
动态观瞄装置工作原理如图5所示。
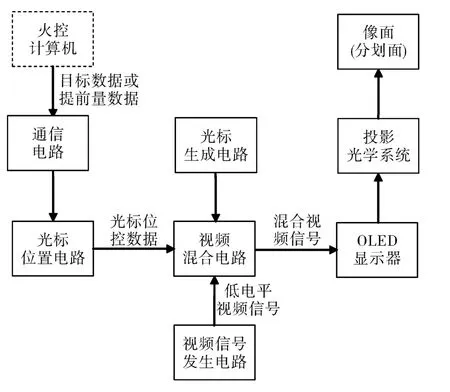
图5 动态观瞄装置工作原理图Fig.5 Operating schematic diagram of dynamic cursor
通信电路接收火控计算机发送的目标及提前量数据送入光标位置电路;光标位置电路内置坐标解算软件,接收数据后实时解算光标位置坐标,产生光标位置信号;光标生成电路产生TTL光标信号;视频信号发生电路产生低电平视频信号。光标位置信号、TTL光标信号和低电平视频信号同时送入视频混合电路,视频混合电路根据光标位置信号将光标TTL信号镶嵌在低电平视频信号的相应座标点,即由光标形状尺寸和动态位置所要求的座标点选择TTL信号,其他座标点选择低电平视频信号,形成含有动态电子光标的混合视频信号并输出到微显示器,投影系统将显示器图像放大到分划面上。
2.2 动态光标位置解算
动态光标位置电路解算和控制方式如下:
1)接收通信电路送入的目标及提前量数据;
2)接收数据为目标坐标时,控制警示灯熄灭;
3)判断目标坐标绝对值是否大于视频图像同向边缘坐标的绝对值,并确定光标横、纵坐标的取值,即:
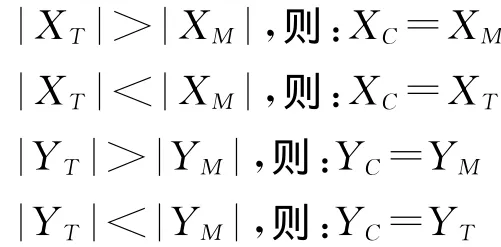
4)接收的数据为提前量坐标时,控制警示灯点亮,并令:

式中:XT、YT为目标横、纵坐标值;XC、YC为光标横、纵坐标值;XM、YM为视频图像与目标同向边缘横、纵坐标值;XA、YA为提前量数据横、纵坐标值。
光标位置解算软件工作流程如图6所示。
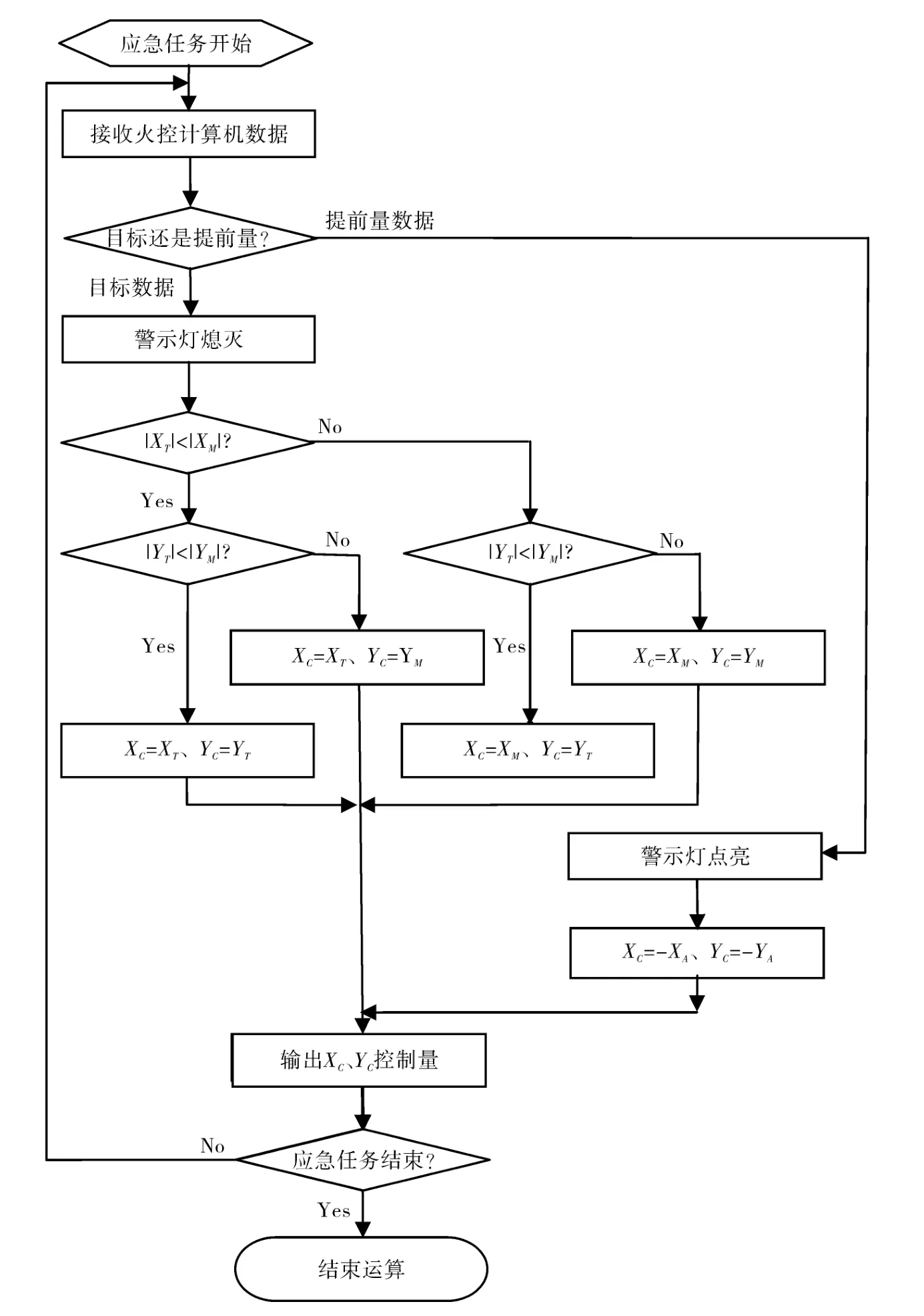
图6 光标位置解算软件工作流程图Fig.6 Flow chart of software to calculate position of dynamic cursor
3 动态观瞄装置工作方式
火炮伺服系统发生故障,自行高炮以应急方式工作时,炮长瞄准镜动态观瞄装置接收并解算火控计算机发送的目标信息或提前量数据,产生含有动态光标的混合视频信号,微显示器将此视频信号转换为可视图像。投影光学系统将图像投影到分划面上,投影图像中心与分划面原点重合,同为瞄准线零位。
目标未进入视场时,火控系统发送数据为目标角座标,光标受此数据控制持续停留在目标同向视场边缘(见图7),引导炮长以手动方式调转瞄准线和火炮,使目标进入视场。
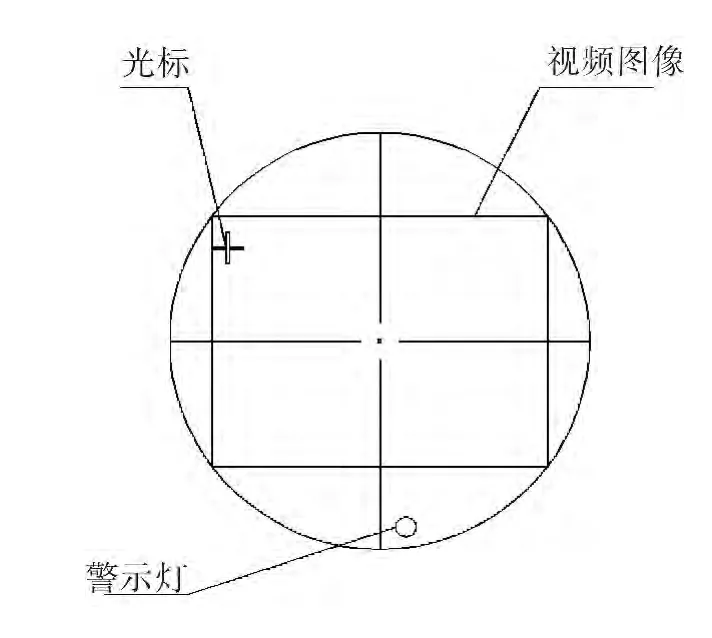
图7 光标持续停留在目标同向视场边缘Fig.7 Cursor staying in codirection FOV edge of object
目标进入视场后,光标采用目标角座标数据,动态光标与动态目标重合,炮长手动调炮使瞄准线对准重合的目标和光标,并保持跟踪(见图8)。

图8 瞄准线对准重合的目标和光标Fig.8 LOS aiming at superposed object and cursor
目标进入射程后,火控系统发送数据为提前量数据,分划板下方警示灯(图4、图7~图10)点亮,提示炮长立即执行进入提前量位置的操作,此时光标反向指示瞄准线和火炮应到达的提前量位置,即光标位置与提前量位置对称,对称轴过瞄准线零位且垂直于目标运动方向(见图9)。炮长手动调炮使光标对准目标,即可使瞄准线和火炮到达射击提前位置(见图10)。此时的主要观瞄误差为光标对准目标的对准误差。
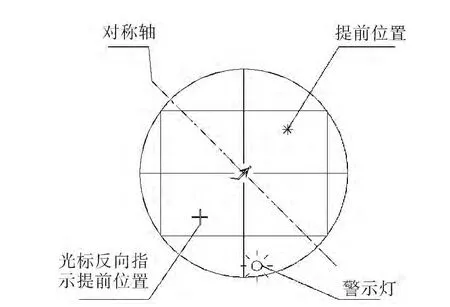
图9 对称轴过瞄准线零位且垂直于目标运动方向Fig.9 Symmetry axis passing LOS zero position while perpendicular to object moving direction
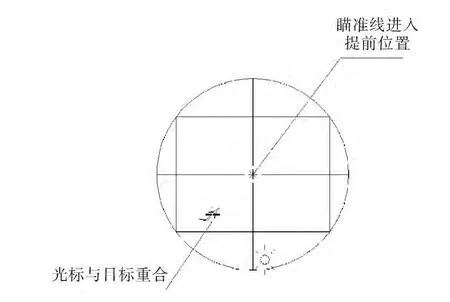
图10 瞄准线及火炮到达射击提前位置Fig.10 LOS and artillery arriving at shooting lead position
4 结论
与以往使用传统光环瞄准镜应急工作,利用间接信息将目标导入视场的方式相比,动态观瞄装置可迅速、准确引导目标进入视场;与使用传统光环瞄准镜光环对准目标使火炮到达提前位置的方式相比,动态观瞄装置以精度高、实时性强的动态光标指示提前量,可使瞄准线和火炮快速、准确到达射击提前位置,减轻了操作者的工作强度和精神压力,可解决反应速度慢、对准精度低、提前量误差大的问题,使武器系统易于抓住战机,提高命中概率。
含动态观瞄装置的瞄准镜安装在某型自行高炮上对空中机动目标进行试验,缩短了手动引导目标进入视场的时间,显著提高了瞄准线和火炮到达射击提前角的精度,实现了预定功能,达到了预定效果。
[1] Wang Xingmin,Duan Xia.Fire servo system development trend[J].Mechanicai Management And Development,2011(6):75-78.王星民,段霞.火炮伺服系统发展趋势[J].机械管理开发,2011(6):75-78.
[2] Liu Rui,Zhang Jiao,Sheng Andong.Analysis on the hit probabilities of antiaircraft emergency shooting for three methods of firing equation solution[J].Fire Control & Command Control,2011,36(3):52-56.刘锐,张蛟,盛安冬.高炮应急方式下三种诸元求解方法的命中概率[J].火力与指挥控制,2011,36(3):52-56.
[3] Liu Rui,Li Yinya,Sheng Andong.A new method for solving the fire equation in emergencyshooting of antiaircraft guns[J].Electronics Optic & Command Control,2009,16(10):26-30.刘锐,李银伢,盛安冬.高炮应急射击时一种新的火控诸元求解方法[J].电光与控制,2009,16(10):25-30.
[4] Chen Jingdong,Liu Jie.The OLED manifestation technique and its military apply [J].Ship Electronic Engineering,2003,23(5):23-27.陈敬东,刘杰.OLED显示技术及其军事应用[J].舰船电子工程,2003,23(5):23-27.
[5] Wang Yunjing,Fang Yongjun.Principle and application of display elements OLED[J].Instrumentation Technology,2007(8):32-34.王云景,方勇军.OLED显示器件的原理及应用[J].仪表技术,2007(8):32-34.
[6] Huang Yong,Long Yunfu,Wang Jingbin,et al.Photoelectric fire-control system design for subcaliber antiaircraft gun[J].Electronics Optic & Command Control,2005,12(2):61-64.黄勇,龙云富,王静滨,等.光电火控系统在小口径高炮中应用的设计实现[J].电光与控制,2005,12(2):61-64.
[7] Ning Dayong,Gao Yunguo.Method of high accuracy control for motor-based optoelectronic tracking equipment and simulation[J].Opto-Electronic Engineering,2008,35(11):8-12.宁大勇,高云国.车载光电跟踪设备高精度控制方法及仿真[J].光电工程,2008,35(11):8-12.
[8] Jiang Fazhong.Positioning-orientating and external target guidance of self-propelled antiaircraft gun[J].Fire Control & Command Control,1996,21(3):36-42.姜法中.自行高炮定位定向及外部目标导引[J].火力与指挥控制,1996,21(3):36-42.
[9] Jiang Tao,Yu Zhenglin,Su Chengzhi,et al.Simulation detection model of lead calculation of optoelectronic sight[J].Acta Armamentarii,2007,28(9):1144-1147.姜涛,于正林,苏成志,等.光电瞄具提前量解算的仿真检测模型[J].兵工学报,2007,28(9):1144-1147.
[10]Zhang Minghui,Zhang Yaoyu,Qiao Yanfeng.Study on vehicle twin-photoelectrical pointing system[J].Opto-Electronic Engineering,2004,31(7):18-20.张明慧,张尧禹,乔彦峰.车载双联光电瞄准系统的研究[J].光电工程,2004,31(7):18-20.
[11]Wang Tao,Zheng Yuanmo,Gao Lenan.All basic antiaircraft gun vane resolving shooting analysis[J].Ship Electronic Engineering,2011,31(2):46-49.王涛,郑垣模,高乐南.高炮瞄准具解算射击诸元分析[J].舰船电子工程,2011,31(2):46-49.
[12]Chen Qiang,Zhou Wenzhe,Ren Penghui,et al.Assembly and adjustment technology for tank gunner's primary sight optical system[J].Journal of Applied Optics,2013,34(2):235-238.陈强,周文喆,任鹏辉,等.某坦克炮长镜光学系统装调技术[J].应用光学,2013,34(2):235-238.
[13]Wang Tao,Tang Yanhu,Yang Jian.Research on kill limits of antiaircraft artillery weapon[J].Fire Control& Command Control,2010,35(6):70-72.王涛,唐宴虎,杨健.高炮武器系统杀伤边界研究[J].火力与指挥控制,2010,35(6):5-7.
