双目大出瞳直径光学系统观察舒适性设计
2015-06-01刘效东侯建伟朱佳丽邱卫根孙建华
刘效东,侯建伟,朱佳丽,邱卫根,孙建华
(1.江苏北方湖光光电有限公司,江苏 无锡214035;2.上海理工大学 光电学院,上海210093)
引言
在通常的光学观察仪器中,为了实现较长时间的舒适观察,往往采用双目光学结构形式。常见的双目光学仪器有双筒望远镜、双目显微镜、飞行员头盔夜视仪,以及各种车辆平台上的双目观察仪器。传统的双目光学结构通常采用瞳距可调来适应不同人眼的瞳距。随着微显示技术和数字视频技术的发展,双目大出瞳结构的光学仪器也越来越多,如双目热像仪、单管双目夜视仪、视频眼镜、体视眼镜等。双目大出瞳结构,在设计中除了考虑像差外,还要考虑双目结构对人眼的影响。如果设计不当,观察者长时间使用仪器会产生头晕、疲劳等不适感。本文通过分析人眼双目视觉原理和典型案例,找出仪器设计中的误区,实现双目大出瞳结构的舒适性观察设计。
1 人眼双目视觉原理
人眼的视轴是晶状体中心与黄斑中心的连线,通过视轴观察目标的线路叫视线,而黄斑中心仅约2°内影像视觉是最清晰的。因此人眼要实现对目标的注视观察,必须将视线对准目标,并通过人眼调节使目标聚焦在黄斑中心。当双目观察目标时,双目视线的会聚点和每个眼睛的聚焦点都会在观察目标上。如图1所示,b为人眼的瞳距,l为人眼到目标的距离;当观察无穷远(l=∞)目标时,双目视线平行。我们知道正常人眼双目舒适观察目标的距离为无穷远到明视距离(l=250mm)[1],在 该 范 围 里,会 聚 角 ε 从 (0~b/250)rad,变化了4m-1(光焦度),人眼聚焦、会聚观察目标上同一点,因此人眼不易疲劳,适合长时间观察。而当会聚角为负值或大于b/250rad,正常人眼会因调节吃力感到不舒适。我们知道还有一种人眼双目观察不舒适的情况:即聚焦点与会聚点不在一个面,如图2所示的祼眼立体图对和图3所示的计算机随机点立体图[2]。图2的情况是会聚点在无穷远,聚焦点在有限远,如果lo=250mm,此时的聚焦差为4m-1;图3的情况是聚焦点和会聚点分开,形成了聚焦差。如果目标到人眼的距离为lo,会聚点到人眼的距离为lh,这里定义聚焦差为人眼到会聚点和聚焦点的距离倒数之差的绝对值 M=(|1/lo-1/lh|),单位为 m-1。
图1 双目视觉会聚与聚焦示意图Fig.1 Schematic diagram of convergence and focus binocular optical system
显然M值越大,人眼会感到越不舒适,甚至无法观看。如图1的情况,M值为零时观察最舒适,因此立体电影、电视和红绿滤色立体图等都是采用这种方式提高观察舒适性[3]。一般的光学仪器设计时都把双光轴置于平行状态,目镜中心视度定为零;人眼通过光学仪器进行观察时,为了适应不同瞳距的人眼观察,仪器双目的瞳距都可以调整,通过调整达到了舒适观察的条件[4-7]。由于大出瞳双目光学仪器瞳距没有调整环节,如何实现舒适观察,下面以视频眼镜的典型光路,来分析设计装调中的影响因素。

图2 立体图对及原理Fig.2 Stereogram and principle
图3 随机点立体图及聚焦差示意图Fig.3 Random dots charts and schematic diagram of focusing difference
2 双目大出瞳光学仪器观察舒适性影响因素讨论
双目光学仪器目镜的双光轴一般设计和调校成平行的,对于水平会聚和水平发散公差都有明确要求。当目镜为零视度时,从如图4所示的光路可看出,对于瞳距大小都能够适用。我们知道国内一般要求光学仪器的瞳距适应范围是54mm~72mm,有18mm的调节量,如果瞳孔按3mm计算,出瞳直径要设计到12mm就可覆盖这个瞳距变化量;如果按微光夜视仪瞳孔6mm计算,出瞳直径要设计到15mm才能满足要求。当目镜不在零视度时,就会出现一些问题。从图5负视度瞳距光路示意图中可看出,只有瞳距较大的S1有可能聚焦差为零,S2、S3的则不能,S3的聚焦差较大,且瞳距较小S3的会聚角还会为负值。我们知道眼球的运动是靠6条肌肉的动作来实现 的[4,8-10],它是一个多年形成的协调的动作。因此让人的双眼肌肉不协调地工作会导致观察疲劳,不适宜长久观看,甚至不能观看。图6显示了正视度瞳距光路示意图,与图5相反,只有瞳距较小的S3有可能聚焦差为零,瞳距较大S1的会聚角还会为负值。在军标中规定双目光学仪器两光轴的水平发散90′,水平会聚是20′,对应会聚角ε从-20′~90′;这说明双目光学仪器应该设置使人眼会聚角ε大于0,以便观察有限距离时,减少聚焦差。反之,聚焦差比较大,眼睛长时间观察会产生疲劳。
图4 视频眼镜典型光路示意图Fig.4 Principle diagram of head mounted display
图5 双目负视度瞳距光路示意图Fig.5 Optical path schematic diagram of binocular negative eyesight
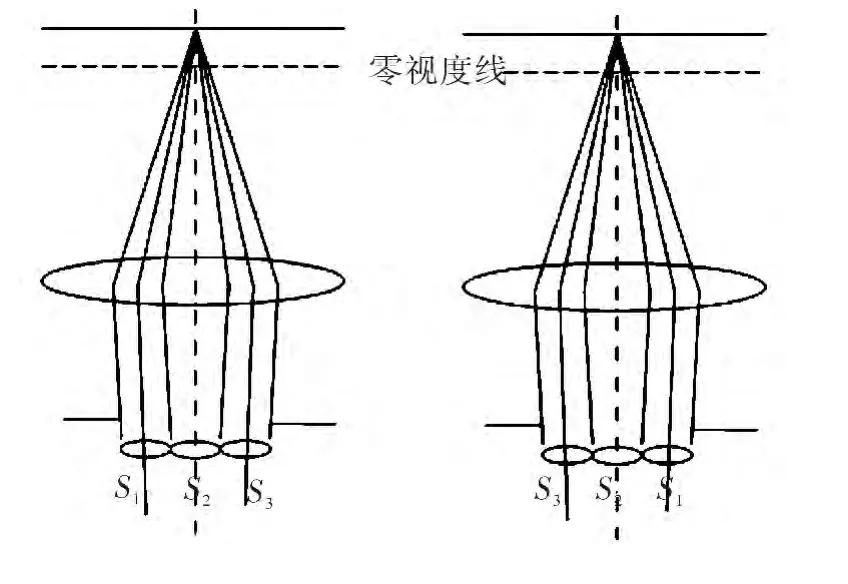
图6 双目正视度瞳距适应光路示意图Fig.6 Optical path schematic diagram of binocular positive eyesight
要解决这个问题,就要使双目镜光轴平行或水平发散,这需要将左右2个像面预先移动一定量。至少要保证图7中S3和图8中S1的出射主光线平行于光轴。以实例来分析,如瞳距适应范围是54mm~72mm,瞳孔为6mm,视度调节范围为(3~5)m-1,出瞳直径设计为15mm,目镜焦距设计为21mm,2个像面需向中心预先移动0.48mm以上。通过这样的装配,双目观察舒适性会有明显提高。一般的光学仪器中心视度或固定视度都定在(-1~-2)m-1。因此2个像面中心也应移至使会聚点达到1m或0.5m的位置,让眼睛会聚在250mm~∞的范围内(以矫正视力为准)。仍用上面的例子,2组像面分别应向中心移动0.67mm或1.34mm,那样看起来会很舒适。如果按现有的标准检测,光轴平行性及瞳距适应范围都将面临不合格。当然,如果在双目大出瞳光学仪器设计中,考虑可进行像面与目镜相对微调的机构,以确保会聚角为零或正值,聚焦差为零,观察舒适性会大大提高。
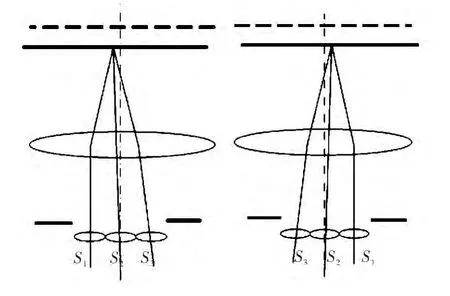
图7 双目负视度瞳距适应光路示意图Fig.7 Optical path schematic diagram of adapted pupil distance for binocular negative eyesight
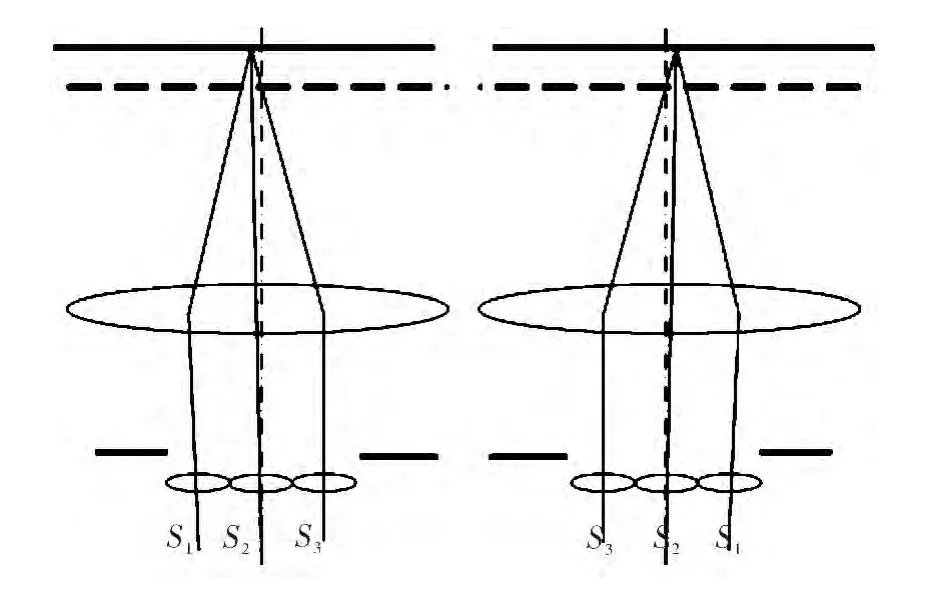
图8 双目正视度瞳距适应光路示意图Fig.8 Optical path schematic diagram of adapted pupil distance for binocular positive eyesight
3 结论
双目大出瞳光学仪器的会聚角和聚焦差控制是2个重要的设计要素,对仪器的观察舒适性非常重要。在双目大出瞳结构设计中应避免会聚角负值的情况出现,聚焦差尽可能为零,一般应小于2m-1。如果是年轻战士用的军事装备,双目镜光轴应预置一个(0~b/250)rad范围内的会聚角,这可以让更多的战士实现长时间地舒适观察仪器。
[1] Zhang Yimo.Applied optics[M].Beijing:Publishing House of Electronics Industry,2008.张以谟.应用光学[M].北京:电子工业出版社,2008.
[2] Zhang Ling,Liu Xiaodong,Xie Jinghui,et al.The design and manufacture of computer 3Dstereogram[J].Optical Technique,1994(5):17-22.张玲,刘效东,谢敬辉,等.计算机3D立体图的设计和制造[J].光学技术,1994(5):17-22.
[3] Liu Xiaodong,Qiu Weigen,Xie Jinghui.The manufacture of computer 3Dstereographic-geological maps[J].Optical Technique,2001(1):16-24.刘效东,邱卫根,谢敬辉.计算机红青滤色立体图对的制作[J].光学技术,2001(1):16-24.
[4] Li Ming.Visual principle[M].Beijing:the World Book Publishing House,2012.李铭.视觉原理[M].北京:世界图书出版社,2012.
[5] Lu Haiping,Liu Weiqi,Kang Yusi,et al.Deisign of compact optical system in wide-angle head mounted display[J].Optical and Precision Engineering,2012,20(5):979-986.卢海平,刘伟奇,康玉思,等.超大视场头盔显示光学系统设计[J].光学精密工程,2012,20(5):979-986.
[6] Hu Jixian.Optical system design of periscope for finite distance target[J].Optics & Optoelectronic Technology,2014,12(4):90-93.胡际先.有限远目标潜望镜光学系统设计[J].光学与光电技术,2014,12(4):90-93.
[7] Gao Ming,Qiang Xilin,Chen Zhili.Research of the aviator's night vision imaging system on head-binocular[J].Journal of Xi'an Institute of Technology,2001,21(4):300-304.高明,强西林,陈智利.头盔式双目微光夜视仪研制[J].西安工业学院学报,2001,21(4):300-304.
[8] Fang Liluo,Yu Jisheng.A study of range of the optical axis non-parallelism of binocular optical rangefinder[J].Journal of Experimental Psychology,1982(2):218-226.方俐洛,虞积生.双目光学测距仪器光轴不平行度范围的实验研究[J].心理学报,1982,2:218-226.
[9] Shi Yusheng,Liu Bingqi,Ying Jiaju.Digital calibration system of binocular photoelectric equipment optical axis parallelism[J].Semiconductor Optoelectronics,2012,33(4):596-599.史云胜,刘秉琦,应家驹.双目光电装备光轴平行性数字化检校系统设计[J].半导体光电,2012,33(4):596-599.
[10]Li Guoliang.Assembly and correction of binocular microscope[J].Instrument Technique and Sensor,1983(2):43-45.李国良.双目显微镜装配与校正[J].仪表技术与传感器,1983(2):43-45.
