智能化除草机器人技术发展现状及趋势展望
2015-05-30邢占强
邢占强
摘要:为缓解机械施药技术存在的浪费农药及污染生态环境问题,给出一种智能化除草设备的设计方案。综述智能化除草机器人技术发展现状,介绍除草机器人技术原理及其重要技术内容,展望其发展趋势及前景,为发展智能化除草机械提供技术参考。
关键词:除草机器人;机械除草;智能;运动主体;末端执行器
中图分类号:S224.3 文献标识码:A 文章编号:1674-1161(2015)05-0037-02
1 除草机器人发展概况
我国是农业大国,80%的人口是农民,人均土地拥有量少,农业机械化、自动化的需求不如发达国家那么迫切,因此,农业机器人的发展相对滞后。目前,我国已经进入人口老龄化时期,加之受城镇化进程的影响,农村劳动力数量大为减少。这使得农业生产成本不断提高,农民的劳动强度越来越大。
目前,我国主要使用化学药剂和人工的方式除草,其特点是劳动强度大、耗时费力、效率低、效果差,除草工作完成后,幼苗仍受不同程度的草害威胁。滥用农药在很大程度上造成农民直接或间接经济损失,如人身中毒、农产品农药残留量超标、环境污染、药害、生物链破坏、农药浪费等。随着人们生活水平的提高,人们开始重视生存环境,对食品安全也越来越关注。长期以来,我国在机械施药技术方面的规范混乱短缺、无章可循,加之广大用户的机械施药技术水平低、安全施药意识淡薄,导致每年因施药不当而中毒伤亡的人数高达10万人左右。同时,由于使用不当,农药大量飘移流失,导致农药有效利用率仅为30%左右,严重污染农业生态环境。
随着科学技术的发展,在大田除草的生产环节上,智能型机器人开始融入其中:从产生到现在,从国外到国内,从图像识别分析到机械手准确定位。目前,发达国家已经广泛开展农业机器人研究。近年来,瑞典、丹麦、荷兰等欧洲国家及美国、日本等相继开展杂草识别和除草机器人的研究。虽然我国对除草机器人的研究刚刚起步,但随着国家对农业机器人重视程度的提高,农业除草机器人的研究领域必将取得重大突破,并在农业生产能力提高方面发挥重要作用。
2 除草机器人技术原理及其重要技术
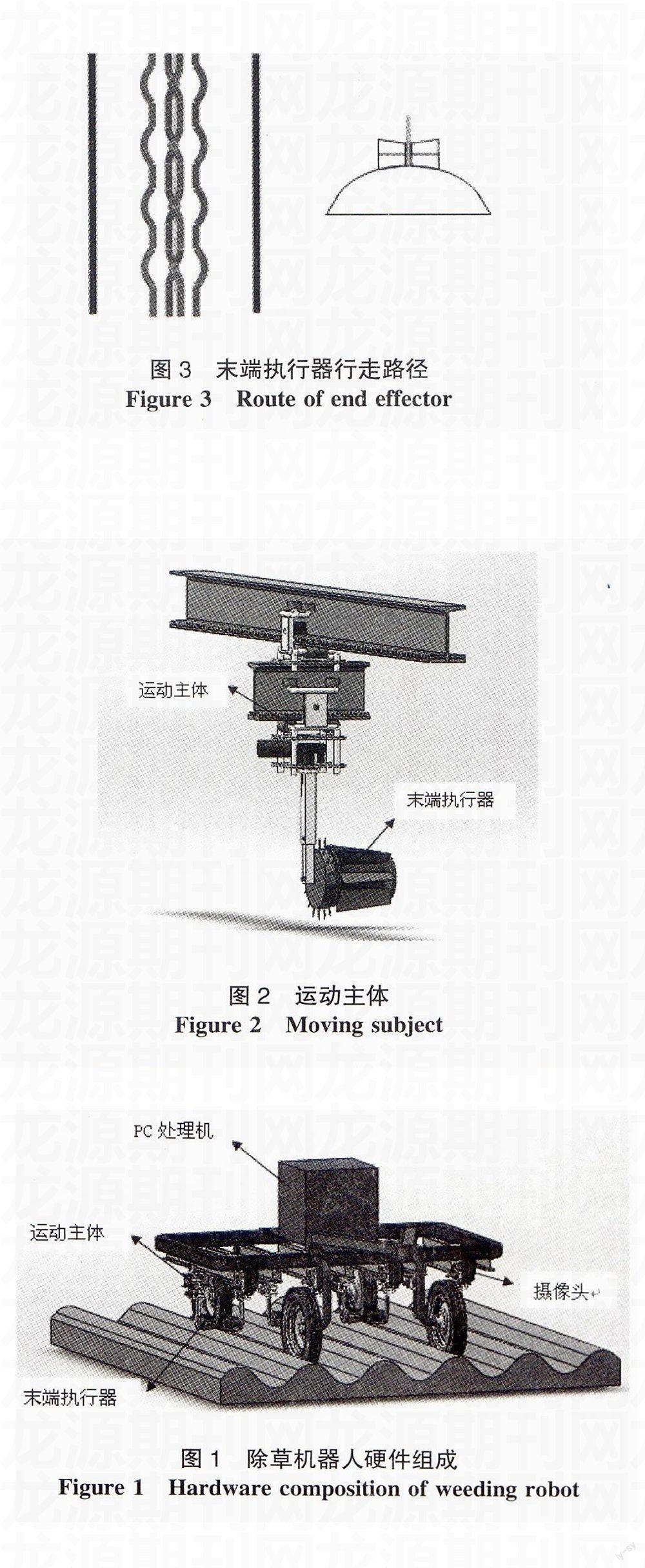
除草机器人的硬件部分由PC处理机、运动主体、末端执行器、摄像头等组成(见图1)。
在除草机器人的设计中,摄像头的视觉图像分析运动主体的灵活快速响应和末端执行器的指令执行为关键所在。
2.1 除草原理
除草机器人工作原理:在PC处理机内部建立数据库,存储作物生命特征,并作为对照;除草工作时,摄像头沿着作物生长的垄条进行拍摄,并将所拍摄的地貌特征影像输送到PC处理机内进行比对分析,然后快速响应,控制各电器部件完成运动主体的前、后、左、右、上、下移动且与作物保持安全距离,由末端执行器在所经过的区域完成除草工作。
2.2 实施除草的重要技术
2.2.1 视觉图像分析 利用机器视觉导航技术引导除草机器人沿着农作物行自动行走,同时利用机器视觉技术检测农作物行间作物位置。
主要应用方法:1) 基于OCD-ICP的图像配准方法。该方法利用图形学原理,对图像边缘角点候选点集提出4个筛选规则,逐步筛选优化的角点集,并在此基础上利用迭代最近点的方法得到最优配准。2) 基于HSI颜色分量的颜色特征提取方法。该方法结合HSI颜色分量反映物体本质颜色的特点,采用直方图多阈值分类方法量化各HSI颜色分量,组合量化后的颜色分量提取图像颜色特征,对该方法提取的视觉图像颜色特征进行聚类,并对视觉图像进行分割。
大部分方法都是多种原理并用,采用先进的彩色处理技术,基于一定的平台技术。我国的相关技术还有很大的需求和发展空间,国外在这方面的研究比较成熟和先进。
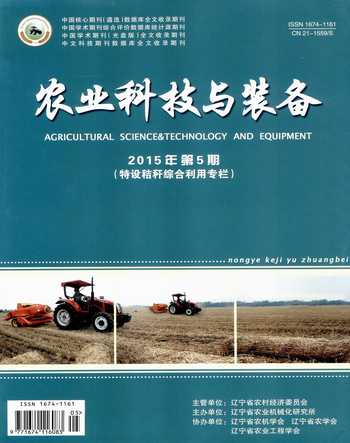
2.2.2 运动主体的准确快速响应和末端执行器的指令执行 除草机器运动主体运送末端执行器在作物间行走除草并绕过作物所在位置。在整个过程中,机器人的图像识别处理能力直接决定作业效果。运动主体及末端执行器的行走路径分别见图2和图3。
主要应用方法:1)在三维软件中建模,然后利用模型在三维软件环境中进行仿真,模拟在不同路面条件下机器人的移动滑移效果,并根据机器人的运动学特性重建出不可测的滑移量。将滑移量传递给控制器参数设计出滑移补偿控制器,并进行三维软件与MATLAB联合仿真。仿真效果表明,该控制器可以有效地补偿滑移效果,改善移动机器人在滑移状态下的控制精度。2)数字图像处理和计算机视觉技术发展十分迅速,广泛地应用于军用和民用领域,是智能机器人获取外部信息和理解世界的重要途径。运动检测与目标跟踪是计算机视觉中两个最重要的应用,也是实现智能化识别及除草的关键技术,借助传感器信息执行部件能够快速安全地到达目标点,并实施除草的动作指令。
3 除草机器人发展趋势
随着信息化时代的到来和设施农业、精确农业的出现,落后的农业生产方式也乘上了“现代化的快车”,而农业的新发展离不开生物工程与信息化。除草机器人融合田间测绘、变量操作和决策支持系统等关键技术,将在现代农业中担当主体角色。
使用除草机器人可以提高劳动生产率,解决劳动力不足问题,改善农业的生产环境,避免农药对人体的伤害。因此,开发高效去除杂草、降低甚至消除生态污染的自动化除草机器人十分必要。从长远来看,除草机器人具有很高的社会、经济、生态效益。
未来,我国农业机器人将会朝着更加智能、准确、高效、绿色的方向发展。农业机器人的发展,特别是除草机器人的发展是我国农业高效产业化的组成部分,会使我国的农业生产发展更加现代化、科学化。
参考文献
[1] 杨晶东,杨敬辉,洪炳镕.移动机器人视觉图像特征提取与匹配算法[J].计算机应用研究,2009(9):3526-3529.
[2] 侯学贵,陈勇,郭伟.除草机器人田间机器视觉导航[J].农业机械学报,2008,39(3):106-108.
[3] 陈勇,田磊,郑加强.基于直接施药方法的除草机器人[J].农业机械学报,2005,36(10):91-93.