基于模糊滑模变结构的PMSM矢量控制的仿真研究
2015-05-25凌有铸陈孟元徐海东
陈 浩,凌有铸,陈孟元,徐海东
(安徽工程大学安徽省电气传动与控制重点实验室,芜湖 241000)
基于模糊滑模变结构的PMSM矢量控制的仿真研究
陈 浩,凌有铸*,陈孟元,徐海东
(安徽工程大学安徽省电气传动与控制重点实验室,芜湖 241000)
为解决传统PMSM矢量控制系统稳定性不好,鲁棒性差以及容易受外界摄动和干扰等问题,提出一种基于模糊滑模变结构控制的PMSM矢量控制系统,以模糊滑模变结构控制方式来设计转速调节器,并在Simulink下进行仿真;仿真结果表明:基于模糊滑模变结构控制的PMSM矢量控制系统,在外界干扰下,具有良好的系统动态和稳态性能,鲁棒性更强。
模糊控制;滑模变结构;矢量控制;鲁棒性
永磁同步电机(PMSM)矢量控制系统大都采用PID控制作为其速度控制器,虽然其算法相对较为简单、易于实现、静态特性较好,但是在实际应用过程中,由于系统模型建立困难、系统参数随环境条件而变化、外界负载扰动的存在,导致系统的快速性、抗扰性以及参数改变的鲁棒性都并不理想。根据被控对象的特征及PID控制策略的缺陷,提出了一种新型的模糊滑模变结构(FSCM)控制策略。变结构控制(SCM)是一种特殊的不连续的控制策略,此种控制策略控制算法简单,且对于外界摄动和干扰具有不变性,具有快速性好,超调量小,抗扰性强和鲁棒性高的特点[1]。SMC控制的不连续性会造成系统抖振,使系统运行失真或不稳定,造成控制精度下降。现设计一种模糊滑模变结构控制的速度调节器,通过模糊规则改变系统相关参数,有效地抑制系统的抖振,并且保留并升了滑模变结构控制原有的优点。
1 PMSM的数学模型
PMSM和普通三相同步电动机的定子结构基本相似。在建模,设计及分析的过程中可以采用类似于普通三相电动机的假设:转子磁场以正弦波形式分布在气隙空间中,定子绕组里的感应电动势是正弦波,认为定子铁芯为线性磁路;忽略铁芯涡流和磁滞耗损;转子上无阻尼绕组。在经过CLARK和PARK变换后,得到d-q坐标系下PMSM数学模型,其电压方程为[2]

对表面示永磁同步电机有Ld=Lq=L,其机械运动方程有

式(1)、(2)中Lq,Ld为交直轴中的电感,R为定子绕组的相电阻的值,p为永磁电机的磁极对数,w为转子的角速度,ud、uq为定子d、q轴的电压,id、iq为定子d、q轴的电流,ψf为PMSM的永磁体与定子的交链的磁链,J、B分别为永磁电机转动惯量和粘滞摩擦系数。
最大转矩/电流、最大输出功率以及id=0的均可作为PMSM的控制方式。使用id=0的控制方式,经过整理得到永磁同步电机的解耦状态方程:

2 基于模糊滑模变结构的PMSM矢量控制
2.1 矢量控制
矢量控制系统如图1所示[3],通过电流传感器检测出ia、ib和ic,通过CLACK和PARK变换得到q轴和d轴上的等效电流id和iq,作为内环的反馈,外环通过传感器检测的转子实际转速值,负反馈环节将转速的给定值和反馈的转速的差值送入ASR,控制输出转矩大小的电流,再将和给定和内环反馈的差值作用于q轴和d轴电流PI控制器中输出uq和ud,最后通过逆变换得到静止坐标系下的系统的输出uα和uβ,结合磁链跟踪控制模块计算选择得出相应的开关电压矢量,进而控制PMSM的转速。
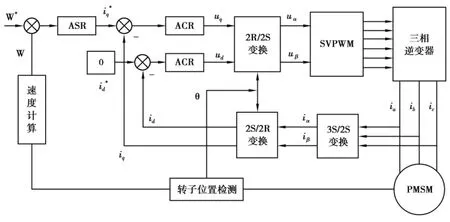
图1 矢量控制系统结构
2.2 模糊滑模变结构控制的设计
变结构控制是一种切换反馈控制,滑模变结构控制是变结构系统的一种控制策略,控制与传统的控制策略的区别在于其控制的不连续性,即系统随时间变化的开关特性。该控制可以是系统在满足一定条件下,沿规定的状态做上下运动,即所谓的滑动模态[4]。该滑动状态可以自行设计,且与系统的参数摄动与扰动关系不大,使得滑动变结构控制具有较好的鲁棒性。
2.2.1 滑模变结构控制转速调节器的的设计

将是式(2)代入式(4)可以得到式(5):


切换函数s选取有线性函数和二次型函数两种形式,由于选择线性切换函数s=cx1+x2,通过极点配置的方法容易确定c值,所以选择线性切换函数,函数如式(7):


式(9)中参数k是系统到达滑模面时间,ε决定了系统的抖动程度。结合式(8)和式(9),经过积分得到系统所需控制率:

2.2.2 模糊滑模变结构转速调节器的设计
通常的所得到的式(10)控制率中的参数为固定值,会使得系统的动态性能较差,并且抖阵较大,对系统中的控制率通过模糊规则使式(10)中的参数k和ε随系统位置变化而变化,可以进一步提高系统的动态性能并能减弱系统的抖振[6]。
模糊控制器一般由模糊化,知识库,模糊推理和去模糊化这4部分组成。模糊化过程需要对参考的输入量,进行预先处理,即对式(7)、(8)中的s和s'进行预处理,将预处理后的值变换到论域范围{-3,-2,-1,0,1,2,3}上,并得到相应的模糊集合。取s,s',ε和k的模糊集合均为{NB,NM,NS,ZO,PS,PM,PB}。输入和数出的隶属度函数如图2所示。
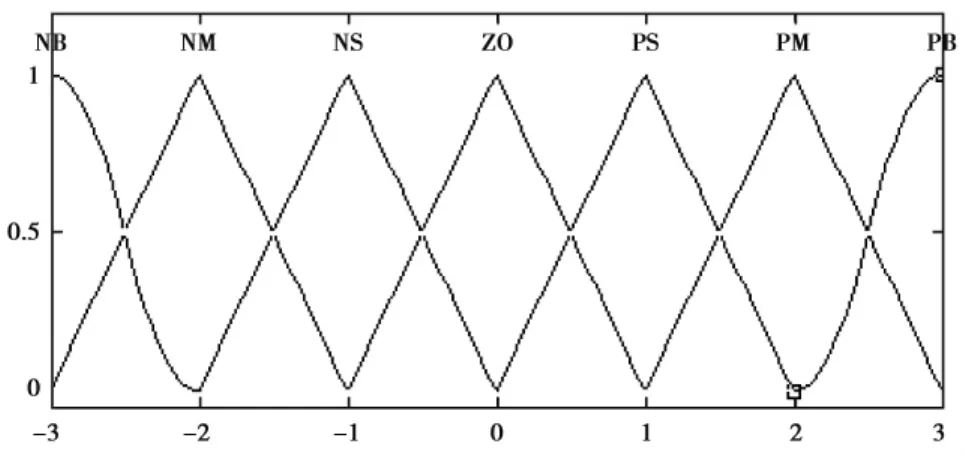
图2 隶属度函数
知识库的基本形式为

由于k值得变化主要是由s引起,而ε的变化是由s和s'共同引起,结合控制规则的基本形式可得参数k和ε的模糊控制表(表1、2):

表1 k的模糊控制
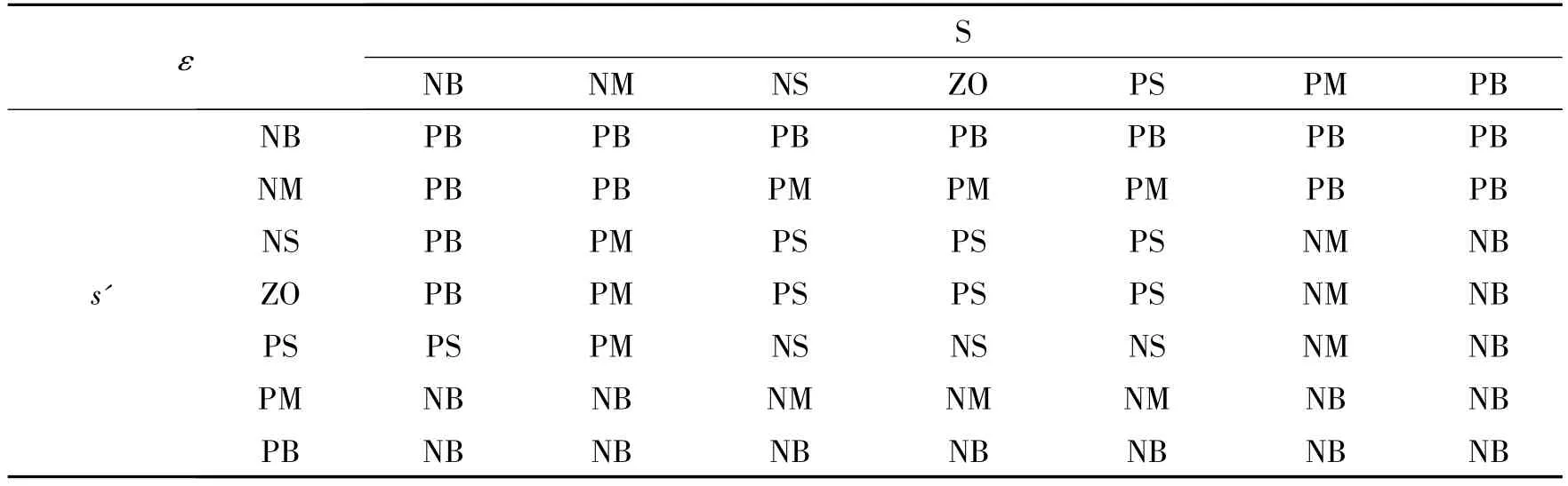
表2 ε的模糊控制表
模糊推理是模糊控制的核心部分,这部分是知识库和模糊集合产生模糊集合的推理过程。模糊推理采用mamdani法。通过上述方式,构建的FSMC框图如图3所示。把图1的速度控制器设计为图3所示的模糊滑模变结构,构成模糊滑模变结构得到矢量控制系统。基于模糊滑模变结构的PMSM矢量控制系统仿真如图4所示。

图3 模糊滑模变结构控制系统结构图

图4 基于模糊滑模变结构的PMSM矢量控制的仿真模型
图4所示仿真模型包括几个部分:常值给定模块,用以提供给定速度和的初始值;转速调节器模块,通过模糊滑模变结构控制把给定转速与实际转子速度的差值变换为的值;电流调节器模块,把交直轴的电流转变为交直轴的电压;PARK反变换模块,把交直轴电压转变为uα,uβ;SVPWM模块用以产生PWM波形; CLARK模块和PARK模块,把检测到三相电流转变为交直轴电流;除此之外还包括测速模块和PMSM等。
3 仿真结果分析
采用经典的Simulink对基于模糊滑模变结构的PMSM矢量控制的仿真研究。仿真所选用的PMSM参数如下所示:极对数p=2,d、q轴电Ld=Lq=0.008 5 H,电阻R=2.875 Ω,永磁磁通ψf=0.175 Wb,永磁电机转动惯量J=0.000 8 kg.m2。
仿真时在0.1 s突加一个Tm=8 N.m的负载,通过模糊滑模变控制和PI控制以及滑模变结构控制分别得到仿真结果,如图5-图7所示。结合图5-图7可得以下结果(表3):
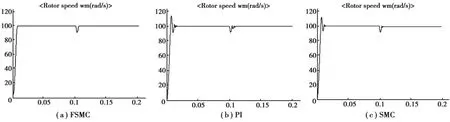
图5 矢量控制转速

图6 矢量控制三相电流

图7 矢量控制转矩

表3 3种控制方式下的结果
由实验仿真所得的结果,可以看出,采用模糊滑模变结构的永磁同步电机矢量控制比采用传统PI控制和滑模变结构控制的永磁同步电机矢量控制响应时间更快、无超调,对外加扰动具有更好的鲁棒性。同时由于通过模糊规则使用到控制量中,大大减弱系统中存在的抖动问题。
4 结束语
针对永磁同步电机矢量控制,设计一种基于模糊滑模变结构控制器(FSMC),并进行了仿真实验研究。仿真结果表明通过FSMC控制,系统的上升时间从0.017 s降低为0.013 s,超调量从原有的14%降为0,在突加负载以后回到平衡状态时间下降了0.005 s。由此表明FSMC控制在外界扰动下和参数摄动具有较好的稳定性,提高了系统的动态和稳态性能,使系统的鲁棒性更强。
[1]胡耀华,刘闯,宁银行.永磁同步电机改进型指数趋近率滑模控制[J].微电机,2012,45(8):54-57
[2]张成,王富东,李胜宁,等.基于MATLAB/Simulink的永磁同步电机矢量控制[J].苏州大学学报:工科版,2011,31(3): 63-67
[3]阮毅,陈伯时.电力拖动自动控制系统—运动控制系统[M].北京:机械工业出版社,2009
[4]LIU Y,ZHOU B,WANG H.A New Sliding Mode Control for Permanent Magnet Synchronous Motor Drive System Based on Reaching Iaw Control[C].Industrial Electronics and Application 4th IEEE Conference on Digital Object Identifier,2009
[5]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996
[6]解晶,张丽香,张晶.模糊指数趋近率参数的二级倒立摆控制[J].电力学报,2012,27(1):44-46
Research on the Simulation of PMSM Vector Control Based on Fuzzy Sliding Mode Variable Structure
CHEN Hao,LING You-zhu,CHEN Meng-yuan,XU Hai-dong
(Key Laboratory of Electrical Transmission and Control of Anhui Province,Anhui Polytechnic University,Wuhu 241000,China)
In order to overcome the shortcomings of traditional PMSM vector control system such as poor stability,poor robustness and easily external perturbation and disturbance and so on,this paper proposes a PMSM vector control system based on fuzzy sliding mode variable structure,designing the rotating speed regulator by fuzzy sliding mode variable structure control method and makes simulating under Simulink.Simulation results show that PMSM vector control system based on fuzzy sliding mode variable structure control has good systematic dynamic and stability and stronger robustness under external perturbation.
fuzzy control;sliding mode variable structure;vector control;robustness
TP23
A
1672-058X(2015)02-0027-06
10.16055/j.issn.1672-058X.2015.0002.006
责任编辑:田 静
2014-06-18;
2014-09-12.
陈浩(1987-),男,安徽和县人,硕士研究生,从事运动控制系统的分析与设计.
*通讯作者:凌有铸(1962-),男,安徽庐江人,教授,硕导,从事运动控制系统的分析与设计.
