人枪系统中人体握持主动力非破坏测量方法
2015-05-24周克栋黄雪鹰张俊斌
金 鑫,周克栋,赫 雷,黄雪鹰,张俊斌
(1.南京理工大学机械工程学院,南京 210094;2.中国人民解放军63856部队,吉林 白城 137001)
人枪系统中人体握持主动力非破坏测量方法
金 鑫1,周克栋1,赫 雷1,黄雪鹰2,张俊斌2
(1.南京理工大学机械工程学院,南京 210094;2.中国人民解放军63856部队,吉林 白城 137001)
为获得连续射击时人体握持主动力参数,提出一种人体握持主动力的测量方法。该方法设计了基于仿生学及人机工程学的仿生握爪,以等效代替人手握持射击。仿生握爪能够在不破坏枪支的情况下获得连续射击时人枪作用力的等效力系,该力系经EMD分解可得显现的握持主动力分量。所得的握持主动力参数对研究射击精度影响因素等课题具有重要意义。实验结果表明,该方法能准确反映连续射击时人枪系统力的作用。
握持主动力;非破坏式;人枪系统
考核武器系统的一个重要技术指标就是连发射击精度[1]。实际射击时,精度不仅受武器本身的客观影响,同时也受到试验射手极大的主观影响。为客观地考核武器的连发射击精度,需要设计一个标准化枪架,以排除试验射手不同所带来的随机测试误差。标准化枪架的设计需要对人枪系统射击时的姿态、位移及相互作用力有准确且完整的了解。前人的工作包括了枪口位移[2]、抵肩力、人体位移等参数的测量,但是研究都针对单发或三发以下连续射击,对于三发或以上连续射击时人体双手握持力(尤其是主动反应阶段)的测量却甚少研究。
据生物学研究[3]可知,神经系统响应时间约为150~200 ms,而肌肉响应时间则在300 ms以上。因此,对于射频为600发/min的连发武器[4]而言,三发以内的连发或点射,射手仍处于被动状态,没有握持主动力作用。但当连续射击超过三发时,人枪系统间存在握持主动力作用。文献[5-6]虽然提出了一种握把处握持主动力测试方法,但存在两个缺点:①该方法需要破坏枪体,因此不具备普适性和重复性;②该方法只测试了握把处两个方向上的握持主动力,并不能完整地反映连续射击时人体握持主动力的全部情况。
鉴于以上分析,本文提出了一种非破坏式人体握持主动力测试方法。该方法不需对武器本身造成破坏,具有通用性和重复性。测试方法能完整地测量连续射击时人体左右手的全部握持主动力。实验结果表明,本文方法能较为客观地反映连续射击时人体主动作用状态。
1 测试对象受力分析
人枪系统以600发/min射频连续射击超过三发后,人体神经中枢开始响应,控制肢体肌肉进行射击姿态调节,如肩部肌肉的收缩、手臂的下拉和左撇,对于这些主动响应时期的人体状态称之为主动态。
人枪系统相互作用情况较为复杂,其中人手握持主动力的示意图见图1。根据射击操作规范及射手经验可知,握持过程中人体左手或右手握住枪械护木处,主要提供非均布的正压力NL和静摩擦力fL。右手或左手握住枪械握把处,主要提供向后压紧的拉力FR。由于枪械和人手并不发生相对位移,因此摩擦力fL并不等于最大静摩擦力fN=μ·NL。因此现有的测量仪器和手段无法测得人左手的握持主动力fL。
本文提出的非破坏式人体握持主动力测试方法是基于控制输出结果一致的基本思想:实际射击时人手与枪体相对固接,即没有相对滑动,手臂对人手产生主动作用,二者以手腕关节连接并传递力的作用;本文方法则以仿生握爪与枪体相对固接,人手对握爪产生主动作用,二者以手腕关节连接并传递力的作用。综上所述,本文以枪械护木下方(即人手腕关节位置处)的三向力(FLX、FLY、FLZ)来等效代替前护木下方握持手的正压力NL和摩擦力fL的合成力系。
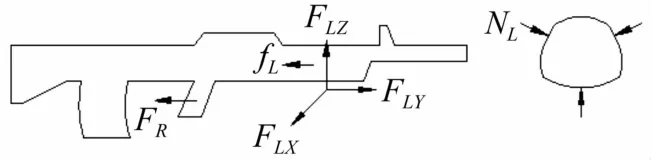
图1 人枪系统人手握持主动力示意图Fig.1 Diagram of active griping force of human-weapon system
2 测试方法的设计及试验简述
本文基于上述基本思想,设计了利用仿生握爪代替人手握持枪械进行连续射击获得握持主动力的测试方法。该方法的难点在于设计仿生握爪的握持方式与握持力大小应与实际情况尽量一致,为此本文进行了大量射击试验以获得实际情况下人的手指各个位置的正压力参数,见表1,同时设计了以柔性弹簧作为手指关节的仿生握爪以保证对不同枪械的握持效果。最后将加工好的仿生握爪与枪械实际装夹测试其握持有效性。测试方法的流程图见图2。

表1 人手左手与仿生握爪手指握力参数表Tab.1 Force of human fingers and bionic fingers
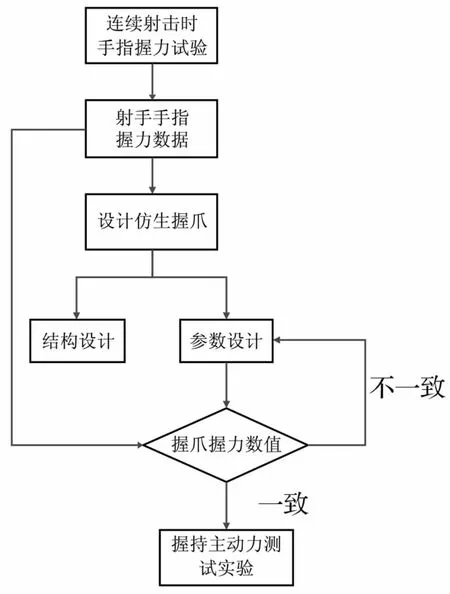
图2 握持主动力测试方法流程图Fig.2 Flow diagram of active griping forcemeasurement
2.1 仿生握爪结构设计
仿生握爪的结构设计依据GB/T 16252-1996《成年人手部号型》以及仿生学相关理论[7-8]。设计并未采用传统固定转轴作为指关节的机械握爪,而是采用了柔性弹簧材料作为手指关节,以适应不同形状的枪械护木结构。设计采用钢索代替手指肌肉,控制钢索上的拉力F,在钢索和弹簧的共同作用下,便可获得不同的握紧力N。当握力N达到所需值时,固定钢索即可保证握持有效。握爪手指工作原理示意图如图3所示。每个指节内侧贴有仿生胶皮以代替人体皮肤的摩擦效果。

图3 仿生握爪手指工作原理示意图Fig.3 Sketchmap of operation principle of bionic fingers of bionic hand
将仿生握爪代替人手握持枪械护木处,握爪手掌下端安装三轴力传感器用于测量该点三个方向的力。传感器下端装有握把,用于射手射击时握持。
2.2 仿生握爪握持效果测试
仿生握爪结构如图4(a)所示,模拟手指节在弹簧关节和钢索的共同作用下,能有效地贴合枪械护木,与人手握持情况近似。图4(b)为实际装夹效果。
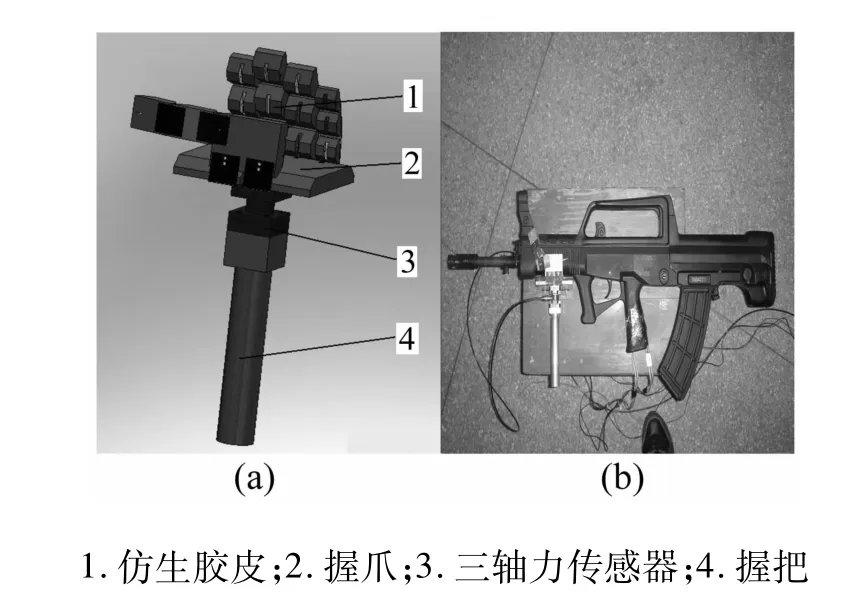
图4 仿生握爪结构示意图及实际装夹效果图Fig.4 Diagrams of bionic hand and clamping result
仿生握爪和枪械实际夹持有效后,同样对相应位置的手指正压力进行测试。实际射手及仿生握爪手指正压力的测试均采用FlexiForce薄膜传感器实现,测得数据结果见表1。可见,二者相对误差均小于5%,表明仿生握爪与射手的握持效果有较好的一致性。
2.3 握持主动力试验
握持主动力射击试验时,将仿生握爪夹持在枪械前护木位置,钢索张紧程度与测试时相同,以保证夹持与人手握持的效果基本一致。射手握持在仿生握爪的握把位置处,连接传感器数据线与数据采集系统,进行连续射击实验。射击试验照片见图5。

图5 射击试验照片Fig.5 Photo of active griping forcemeasurement test
3 实验结果及分析
通过上述方法测得的握持主动力信号为混沌信号,其中包括了系统噪声、射击时火药气体动力作用以及三发后人体握持主动力的作用。本文基于经验模式分解理论,通过经验模式分解(EMD)方法[9],将混沌信号分别分离为不同的内在模态函数(IMF)。根据模态函数的特征,进而获得所需的人体主动态作用。
本文实验对象为某自动步枪,采用的传感器为KISTLER-9327A型三轴力传感器。实验时,进行了多次试验,重复性较好,这里选取其中一次五发连射实验的结果进行分析。
EMD方法假设[10]:任何信号是由一系列不同的简单振动模态组成,每一模态不论线性或者非线性,都具有相同数量的极值点和过零点,且在两个相邻的过零点之间只存在一个极值点,任意两个模态间相互独立,这样任何一个信号就可以被分解为有限个内在模态函数之和。
EMD方法对信号X(t)的分解步骤如下:
步骤1 找到信号X(t)的所有极大/小值点,采用三次样条插值曲线将所有极大/小值点连接起来形成上/下包络线;
步骤2 求出上下包络线的平均值m11,原始信号与均值之差记为h11=X(t)-m11;
步骤3 检查h11是否满足前述IMF条件,若不满足,将h11代替原始信号,重复步骤1~3,直至某个h1k=h1(k-1)-m1k满足IMF条件。记c1=h1k,则c1为信号X(t)的第一个IMF分量;
步骤4 将c1从X(t)中分离得到r1(t)=X(t)-c1,将r1作为原始信号重复循环,直至rn小于某一阈值或者变成单调函数,无法再从中提取满足IMF条件的分量,则EMD分解结束。
由此可将任意信号X(t)分解为n个IMF和一个残量rn之和:

分解出的n个模态函数包含了原信号从高到低不同频带的成分,残量则代表了信号的振动趋势。
对试验信号进行EMD分解可以获得人体左手主动态作用力系中X轴力(即左右方向力)、Y轴力(即前后方向力)、Z轴力(即上下方向力)。信号的EMD分解结果见图6。
对混沌信号进行EMD分解可获得不同的内在模态函数(IMF),其中包含了部分小幅值的噪声结果以及阻尼/非阻尼振荡结果。剔除这些结果,便可获得所需的握持主动力曲线。图6(a)为传感器测得的X(左右)方向原始信号。图6(b)为火药气体撞击枪体对传感器的作用效果,可以看出周期约为0.1 s,对应于射频600发/min与实际相符。图6(c)为X(左右)方向握持主动力曲线,可以发现在约0.4 s后(三发结束时),人体出现明显的主动态反应,其最大值约为60 N。图6 (d)和图6(e)分别为Y(前后)方向的原始信号和握持主动力曲线,同样具有明显的主动态特征,最大绝对值约为1.5 N,其变化趋势反应了在射手躯体由于抵肩力作用后仰时人左手存在向前的缓冲作用。图6(f)和图6(g)分别为Z(上下)方向的原始信号和握持主动力曲线,同样具有明显的主动态特征,最大值约为10N,主动态之前的曲线为支持枪体重量的支撑力,方向与主动态作用力相反。
值得说明,本文测试方法得到的结果与实际试验射手射击时情况存在一定差异。原因在于现有传感器和测试方法无法测得护木处人体握持主动力,本文据此提出以仿生握爪等效代替人手测试人枪系统相互作用力的测试方法,但是对射击姿态会造成一定影响。该方法测得结果实际上更接近射手手臂处的主动力,该力能很好地反映人体在连续射击时对枪械偏转和俯仰的调节作用。
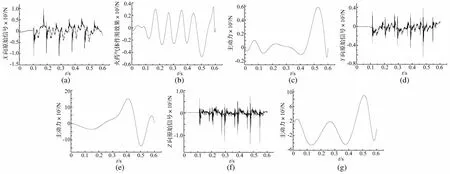
图6 试验信号EMD分解结果图Fig.6 EMD results of test signals
4 结 论
(1)本文提出一种枪械连续射击时人体握持主动力的非破坏性测试方法,该方法能应用于绝大多数的枪械,并解决目前人体握持主动力测试困难的问题,因此具有很好的通用性及工程应用价值。
(2)通过实际射击试验获得连续射击时射手的手指握力。以获得的手指握力为依据,基于仿生学及人机工程学原理,设计了一种可等效代替人手握枪的仿生握爪。利用仿生握爪完成了人体握持主动力的测试。
(3)将EMD分解技术应用于传感器混沌信号的处理,获得了人体握持主动力随时间的变化曲线。
本文获得的握持主动力结果对进一步研究人体主动态作用与射击精度关系以及标准化主动态射击枪架的设计具有重要意义。
[1]戈洛夫ЭA.自动武器设计原理[M].北京:马宗明,译.国防工业出版社,1958.
[2]包建东,王昌明,孔德仁,等.人枪运动对射击精度影响的实验研究[J].仪器仪表学报,2006,27(增刊2):256-258.
BAO Jian-dong,WANG Chang-ming,KONG De-ren,et al.Experimental research of man-gun movement influencing automatic firing accuracy[J].Chinese Journal of Scientific Instrument,2006,27(Sup2):256-258.
[3]丁玉兰.人机工程学[M].北京:北京理工大学出版社,2002.
[4]柳光辽.自动武器测试技术[M].南京:华东工程学院.1986.
[5]陈文明.主动态人枪握把力相互作用研究[D].南京:南京理工大学,2006.
[6]包建东.人-枪相互作用实验研究[D].南京:南京理工大学,2006.
[7]何秀芸,李树军,郝广波,等.超欠驱动仿生机械手的机构设计与实验研究[J].机械设计,2009,26(12):35-37.
HE Xiu-yun,LIShu-jun,HAO Guang-bo,et al.Mechanism design and experimental research of super under-actuated bionic manipulator[J].Journal of Machine Design,2009,26 (12):35-37
[8]Ma Chao,Zhang Ming,Zhang Chun-lin,et al.Analysis of human joint forces in standing posture[J].Journal of Beijing Institute of Technology,2009,18(4):437-442.
[9]杨宇,于德介,程军圣.基于EMD与神经网络的滚动轴承故障诊断方法[J].振动与冲击,2005,24(1):85-88.
YANG Yu,YU Dei-jie,CHENG Jun-sheng.Roller bearing fault diagnosis method based on EMD and neural network [J].Journal of Vibration and Shock,2005,24(1):85-88.
[10]Huang N E,Shen Z,Long SR,et al.The empiricalmode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series[J].Proceedings of the Royal Society of London Series A,1998,454(2177):903-995.
Non-destructivemeasurement of human griping force in a human-weapon system
JIN Xin1,ZHOU Ke-dong1,HE Lei1,HUANG Xue-ying2,ZHANG Jun-bin2
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;2.63856 Unit of PLA,Baicheng 137001,China)
Here,a measurementmethod of active griping force was proposed to obtain the human griping force under continuous firing.Based on bionics and ergonomics,a bionic equivalent grip was designed to replace human hand.The bionic grip could be used tomeasure the equivalent forces system of a human-weapon system without destroying the weapon.The explicit active griping force components emerged after the equivalent forces system was decomposed with EMD.The obtained active griping force data were significant to study affecting factors of firing accuracy.Test results showed that the proposed measurementmethod can accurately reflect the action of human griping force in a human-weapon system under continuous firing.
active griping force;non-destructive;human-weapon system
TJ22
A
10.13465/j.cnki.jvs.2015.21.016
2014-05-20 修改稿收到日期:2014-12-05
金鑫男,博士生,1987年生
周克栋男,教授,博士生导师,1964年生
