一种高效的多足机器人足端力分配计算方法*
2015-05-11郭祖华赵士杰
曾 怡,郭祖华,赵士杰
(北京航空航天大学,北京 100191)
0 引言
对于多足机器人而言,至少有三条腿支撑才能保持机体稳定,每个足端反力有3个分量。但对于一个移动机器人而言,只能列出6个平衡方程,无法解得唯一的解,这个问题被称为力/力矩的分配问题[1-7]。国内外许多学者对此问题进行了研究,归纳起来主要有两种解决方法。第一种方法即伪逆法。V.Kumar[2]采用螺旋理论列出了多肢体系统的平衡方程,根据伪逆的思想,推导了足端支反力的求解公式,该方法没有考虑摩擦约束。J.F.Gardner[3]通过实验结果补充了两个有关摩擦力的方程,同样利用伪逆理论进行求解,该方法得到的结果不能保证机器人关节的控制力矩最优。第二种方法即优化法。Mustafa Suphi Erden[4]和王新杰[5]都推导了以关节力矩为变量的动力学方程、摩擦约束方程,分别以关节力矩平方和最小、电机所需功率总和最小为目标函数,进行优化求解,使得机器人关节力矩达到最小。该方法克服了文献[3]中的问题,但计算费时。此外,H.Y Liu[6]补充了三个与足端反力有关的线性方程,实现了解析求解,计算速度快,由于忽略了一些约束条件,得到的关节力矩较大。本文中提出一个新的力分配算法,在求解模型中考虑了机器人动力学模型和足端的摩擦条件,然后对方程组进行线性化处理,得到一组关于关节力矩的线性方程组,然后采用伪逆法求解该方程组,该方法求解得结果既保证了关节力矩最小,又保证了高的计算效率。
1 计算模型
这类问题中的约束条件和接触反力有关,故将这些非线性等式约束用一组非线性方程组抽象表达为:

式中:f为支反力向量。
利用Newton-Euler建立动力学方程,然后改变动力学方程形式,简记成如下形式:

式中:τ为关节力矩向量;A,C为系数矩阵。
把式(3)代入式(1)中,有:

对于方程(4)利用泰勒公式展开,在初值τ0附近取一阶近似对原方程进行线性化处理:

…,m;m为关节力矩向量τ的维数;i为约束方程的个数。
把方程(5)写成矩阵的形式如下:
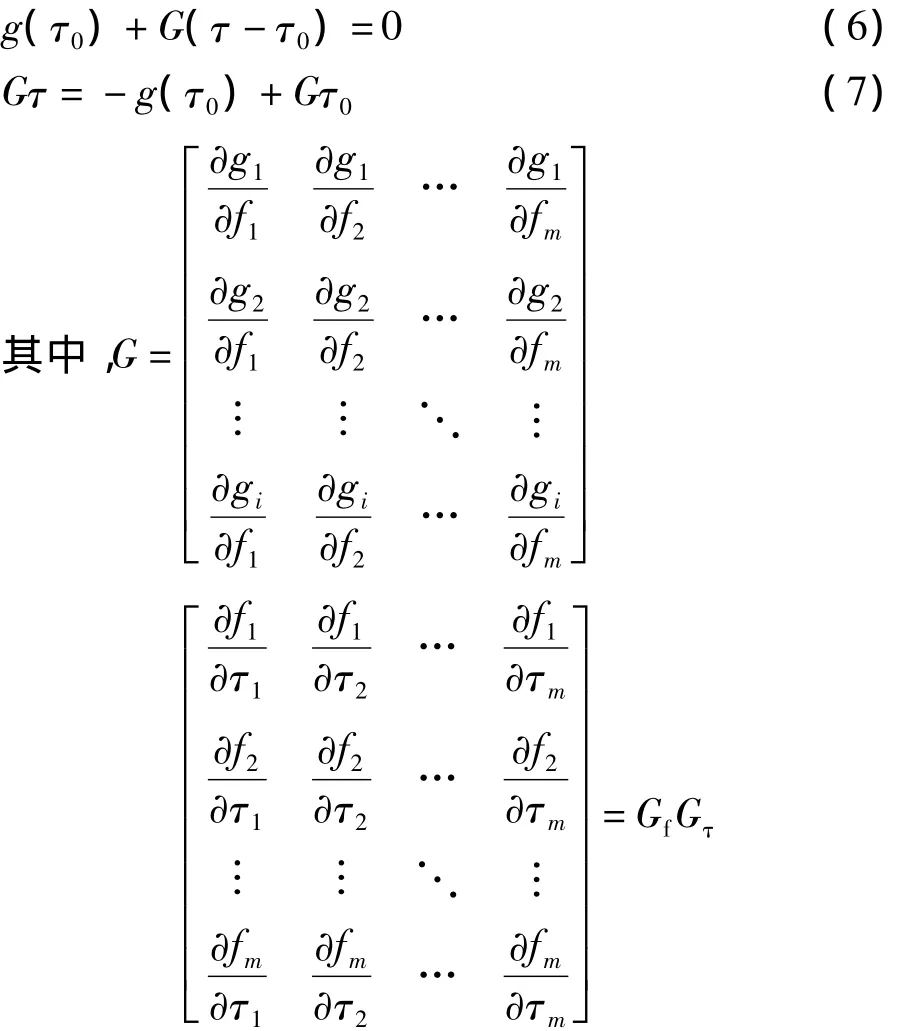
把式(3)代入式(2)中,得:

简记作:

由式(7)和式(9)组合,得:

方程(10)包含了动力学约束Aτ和非线性约束G。其中,Aτ为n×m的矩阵。假设补充的方程个数为m-n,那么方程(10)有唯一解。如果补充方程的个数小于m-n,则利用伪逆理论求具有最小范数的解。
由方程(6)可知,初值的选择是一个关键的问题。如果初值的较为准确,求解过程收敛速度将很快。通过循环迭代解决初值问题,跌代过程如下。
随意给定初始值τ0;利用伪逆理论求解τ;计算|τ-τ0|,如果小于ε,退出循环。否则,跳转把τ赋给τ0,回到式(2)继续计算。
在机器人行走过程中,只需要在第一时间步时通过上述循环计算出τ0,然后计算τ。在下一时刻,只须用上一时刻的τ作为初值τ0进行当前时刻的关节力矩计算,而不再需要跌代,这可以使计算速度大为提高,而且计算结果足够精确。
2 计算实例
笔者以机器人三条腿支撑情况为例验证新算法。现给出六足机器人的模型和结构参数,如图1和表1所示。

图1 一条腿的坐标系示意图
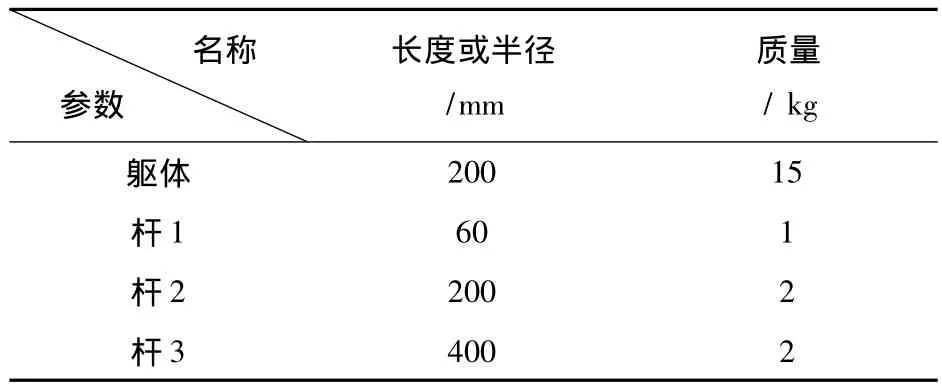
表1 躯体及杆件的设计参数
此时只有6个平衡方程,但有9个未知量。现引用文献[1]的补充方程:

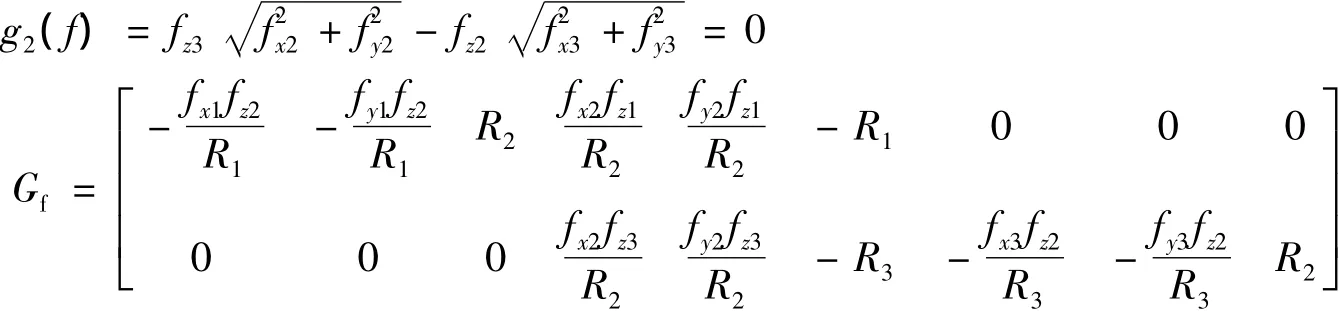
其中:fxi,fyi,fzi,i=1,2,3 为足端反力的三个分量。


F、M为躯体的惯性力/力矩减去迈步腿对躯体作用的力/力矩所得的支撑腿对躯体作用的力/力矩。

图3显示了三种不同方法求得的三个支撑足的足端支反力大小,结果显示,三种方法求得的结果变化趋势一致,其中伪逆法求得的支反力大小略小,另外两种方法求得的支反力大小几乎完全一样。
图4给出了三种算法求得的每条支撑腿足端反力的切法比系数。结果显示,伪逆法求得的切法比系数非常小,小于10-3。而优化法和新算法求出的切法比系数大小相当,都在0.15左右,满足足端不打滑的约束条件。
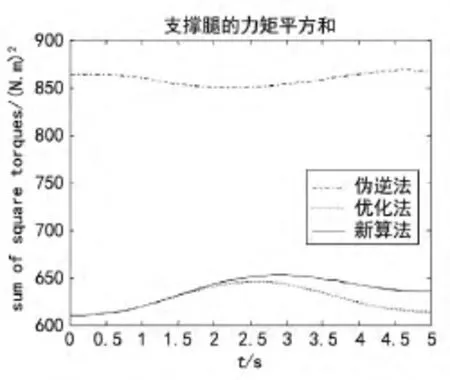
图2 支撑腿关节力矩的平方和
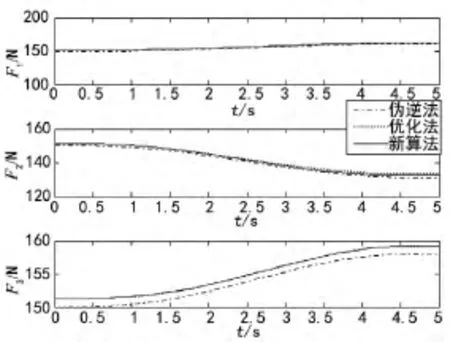
图3 三个支撑腿的足端力变化
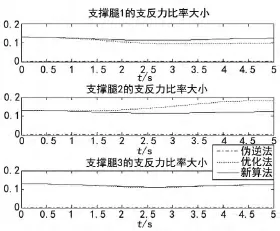
图4 三支撑腿支反力比率的变化
图5 显示了机器人单步行走时,三条支撑腿的力矩大小变化。其中最左侧的一列是各腿关节1的力矩,最右侧的一列是各腿关节3的力矩。从图中可以看出,由于伪逆法和优化法、新算法追求的目标不一样,所以得到的各关节力矩有较大区别。用伪逆法求得的结果显示各条腿关节1和关节3的力矩很小,而关节2的力矩很大;用优化法和新算法求得的结果也是关节1和关节3的力矩小,关节2的力矩大,但差别没有那么显著。另外,用优化法和新算法得到的结果有所差别,关节1的力矩差别比较大,但数值都比较小。关节2和关节3的力矩变化趋势一致,大小略有不同。结合图2可以看出,使用用不同的力分配方法,在采用相同的步态行走一步时,机器人各个关节的力矩平方和的不同,图中2显示新方法的力矩与优化法类似但明显优于传统伪逆法,所以可以推测新方法可以使机器人的总体能耗小于传统伪逆法。利用优化法和新算法求解机器人单步行走关节力矩大小时,记录了两种算法的求解时间。优化法耗时5 019 ms,新算法耗时21 ms,可见新算法的计算效率比优化法高很多,可用于实时控制。

图5 支撑腿9个关节力矩的变化
3 结论
本文提出了一种新的多足机器人足端反力的求解方法。在求解模型中考虑了机器人动力学平衡和足端的摩擦条件,然后对方程组进行线性化处理,得到一组关于关节力矩的线性方程组,然后采用伪逆法求解该方程组。本文以六足机器人三条腿支撑为例,利用伪逆法、优化法和新算法求解机器人一步行走过程中的关节力矩大小。从计算结果来看,伪逆法得到的结果偏于保守,能耗较大,而优化法和新算法得出的关节力矩比较小,保证了机器人能耗较小。从计算时间上看,新算法求解速度快,用时短,计算效率高,优于优化方法。因此,用新算法得到的力/力矩分配方案既保证了关节力矩最小,又保证了高的计算效率,可用于实时控制。
[1] Cheng Fan-Tien,Orin David E.Efficient Algorithm for Optimal Force Distribution-The Compact-Dual LP Method[J].IEEE Transactions on Robotics and Automation,1990,6(2):178-187.
[2] V.Kumar,K.J.Waldron.Force Distribution in Closed Kinematic Chains[J].IEEE Journal of Robotics and Automation,1988,4(6):657-664
[3] J.F.Gardner.Efficient Computation of Force Distributions for Walking Machines on Rough Terrain[J].Robotica,1992,10(5):427-433.
[4] Mustafa Suphi Erden,Kemal Leblebicioõglu.Torque Distribution in a Six-Legged Robot[J].IEEE Transactions on Robotics,2007,23(1):179-186.
[5] 王新杰.多足步行机器人运动及力规划研究[D].武汉:华中科技大学,2005.
[6] H.Y.Liu,B.C.Wen.Force Distribution for the Legs of a Quadruped Walking Vehicle[J].Journal of Robotic Systems,1997,14(1):1-8.
[7] 赵士杰.六足机器人运动轨迹规划[D].北京:北京航空航天大学,2014.
