马铃薯播种机排薯器的设计与研究*
2015-11-23杨家文黄晓鹏
杨家文,田 斌,崔 磊,黄晓鹏*
(1.甘肃农业大学,甘肃兰州 730000;2.甘肃省机械科学研究院,甘肃兰州 730000)
0 引言
马铃薯播种机械化是马铃薯栽培过程中非常重要的一环,也是马铃薯收获机械化的基础,其种植方式及质量不仅影响马铃薯生产过程的全程机械化,而且影响产量的高低。目前我国生产的马铃薯播种机漏播、重播、株距不均等现象严重、同时生产率低下、自动化程度低。同发达国家相比,技术产量滞后[1-6]。排薯器是现代马铃薯播种机的核心部件,是播种机工作质量、效能和特征的主要载体和体现者。笔者设计了一种新型的排薯器,以期解决在实际播种过程中的漏播,重播及株距不均等问题。
1 总体结构与工作原理
1.1 技术要求[4]
(1)保证排薯过程的稳定性。旋转一周或数周排薯的数量应一定。
(2)多行排薯器的排薯量应相等,各行排薯量应一致。
(3)应有较强的适应性和通用性。不但能排播一般种薯,而且能排播春化种薯、特大和特小种薯。能适应不同分级种薯的要求。
(4)排薯频率应能调整,误差不应超过额定量的8% ~10%。
(5)漏播率、重播率和伤薯率不应超过现行的农业技术要求。
1.2 总体结构
设计的排薯器可以做成系列化的通用产品,根据实际播种的需要,以一定比例尺寸缩放加工,然后按照规定的行距将一定数量的排薯器安装在播种机的机架上,行距的调节由排薯器在机架上移动调节。该播种机的装置结构如图1所示,主要由种薯箱、升运装置、补薯装置、振动装置、限流装置、张紧装置、排薯管等组成。
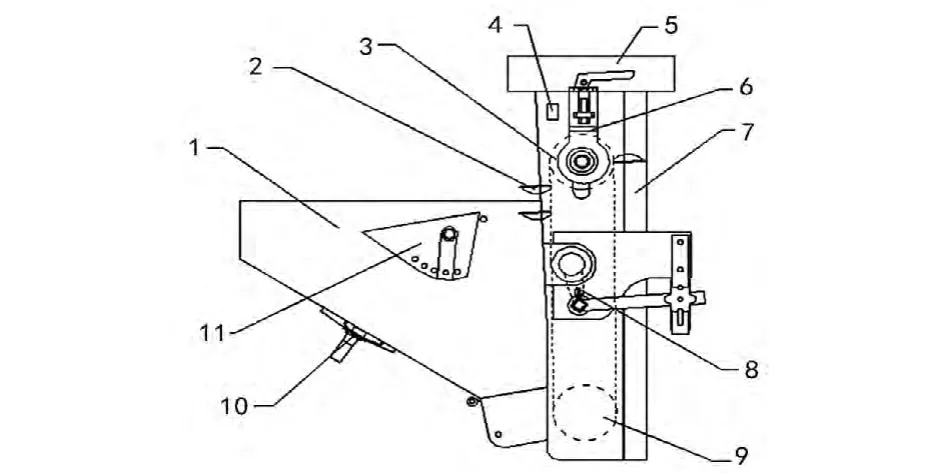
图1 排薯器结构示意图
1.3 工作原理
排薯器的动力由地轮经变速箱传到主动轮9,带动主动轮3、从动轮9间的皮带向上升运,安装在皮带轮上的舀勺2从种箱1底部喂薯区上升时舀到一颗或数颗种薯。在升运过程中,在机器自身振动和振动装置振动轮8的作用下,将多余的种薯筛出舀勺,重新返回种箱中。剩下的单粒种薯在重心力矩的作用下逐渐采取以厚轴平置的方式稳躺在舀勺内。当舀勺上升至从动轮3顶端安装传感器的位置时,检测有无漏种,如果有,控制器4发出控制信号,补薯箱5转动一定角度,使补薯箱中的种薯由箱底正对着下降舀勺的漏空处落下,进行补薯。当舀勺通过出口时,活门打开,种薯落入开沟器开出的种沟内,再由覆土器覆土,完成种植过程。
2 主要部件设计
2.1 升运装置
现代马铃薯播种机的装置主要有链勺式、勺盘式和针刺式。由于链勺式排薯装置从种植精度及通用性方面都比较先进,因此被广泛使用[7]。一般常见的链勺式排薯装置是由主、从动链轮加链条构成,链条上间隔一定距离安装有舀勺。此种排薯器便于安装及通过链条调节株距,但链条在升运经过薯箱时容易划伤薯块,且运动不平稳,同时通过链条调节株距操作复杂,故本设计采用带式传动。皮带上均布安装钢制舀勺,舀勺曲面制成旋转抛物面,具有较好的盛薯夹持能力,可保证振动过程中至少有一个种薯保留在勺内不被振落。
主动轮由地轮通过变速箱驱动,转过一周皮带移动距离S为:
式中:d为带轮直径。
同时带轮旋转一周通过投薯口的舀勺数N为:
式中:k为固定在皮带上的舀勺间距。
马铃薯播种机地轮旋转一周通过投薯口的舀勺数N1为:

式中:i为地轮至主动轮间的传动比。播种机的前进距离S1为:
式中:D为地轮直径。
如果每个舀勺只留一颗种薯,则理论株距l为:
调节地轮至主动轮之间的传动比,即可调节株距。
由于舀勺是在投放口处逐渐偏离投薯管前壁而释放种薯的,投薯点的高低与种薯脱离舀勺背部时的横向尺寸大小有关,大、小薯投薯相位不同,使相邻舀勺投薯点高低发生变化,必然引起播种株距大小的波动,从而影响了播种均匀度。为了提高种植株距均匀度,充种前首先用30~50多级方形网孔筛对种薯进行分级。
2.2 补薯装置
传统机械式的补薯装置采用棘轮机构,结构复杂,操作困难,效果并不理想,本设计采用机电式的补薯装置。补薯装置由补薯箱、传感器和控制器组成。补薯箱安装在从动轮正上方,底部为一圆盘,圆盘内部由隔板隔成许多小格,隔板连接在电机轴上,可随电机轴转动。每一个小格内事先放入一个种薯。其中有一个小格底部漏空,正对着下落中的舀勺背部。补薯装置、补薯箱结构如图2、3所示。
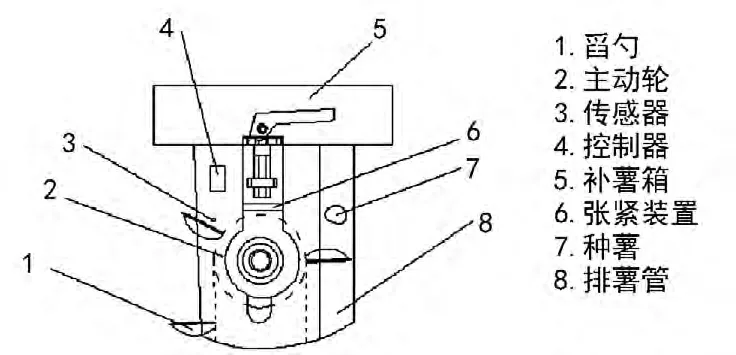
图2 补薯装置
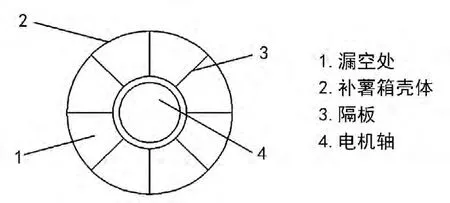
图3 补薯箱结构
其工作过程如下:当舀勺1向上升运至从动轮2顶部安装传感器3的装置时,如果舀勺内没有舀到种薯或种薯被振落,则传感器检测到没有种薯,向控制器4单片机发出信号,单片机发出控制指令,使补薯箱电机轴转动π/n(n为补薯箱格数)的角度,使相邻盛有种薯的小格转至漏空处,种薯落入与空勺相邻的前一个种勺的背面,实行补种。同时单片机累计计数,当计数为n-1时蜂鸣报警,提示补薯箱种薯不足。如果舀勺内盛有种薯,传感器没有检测输出信号,单片机不发出控制指令,补种装置不工作。
2.3 振动装置
为减少和控制舀勺拖带两个或两个以上的种薯,采用振动装置配合特制曲面的舀勺消除重种现象。振动装置由振动电机、振动力调整摆板、锁紧手轮等组成,其结构如图4所示。振动电机2通过安装架安装在排薯管外侧,振动电机在排薯管内紧贴升运装置皮带内侧。电机电源与拖拉机蓄电池电源接头连接,电机控制开关设置在驾驶室内,便于驾驶人员操纵。
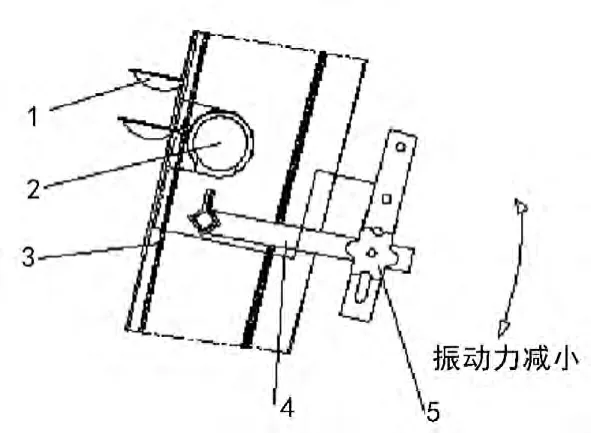
图4 振动装置
舀勺取种和升运时通过振动电机2刺激皮带以一定的频率和幅度抖动,从而振落舀勺内多余的种薯,保持存留一个种薯的状态。如图4,可根据重种程度来调节振动力的大小,松开手轮5使振动力调整摆板4转动从而带动电机振动轮2靠近或远离取种勺安装皮带3。手轮5向上移动时振动力增大,重种程度较大时采用;手轮5向下移动时振动力减小,重种程度较轻时采用。观察振动力合适后锁紧手轮5。
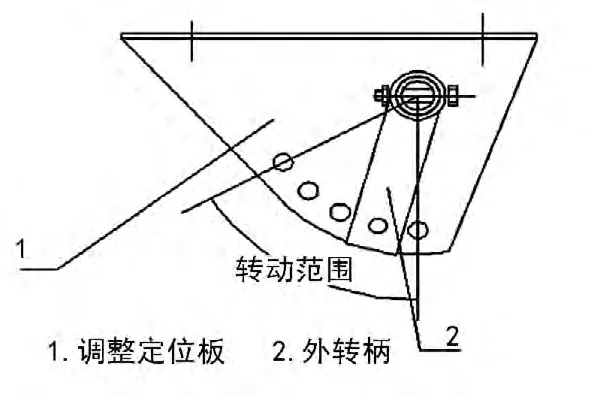
图5 限流装置
2.4 限流装置
限流装置用以控制进入种箱底部取薯区的种薯流量,改善舀勺的取薯能力和减少升运装置的上升阻力,同时也可起到辅助分级的作用。如图5所示,安装在播种架种箱下外侧的调整定位板1上联接固定着外转柄2,此外转柄2与播种架内安装的闸板属同一相位角,因此转动外转柄2也即带动闸板做同向旋转,从而改变了薯种的流动层厚度,也就改变了薯种的流量。将外转柄2向右上方旋转可使薯种流量变小,反之变大。限流闸板上安装一帆布软板,用以保护种薯不被金属闸板刮伤。为了提高种箱内种薯进入取薯区的流畅性,在种箱与取薯区正对的后侧安装一搅动摆杆,用以改善种薯的通流能力。
3 试验
将设计的排薯器安装在现有的马铃薯播种机上进行田间播种试验,同时与2CMF-2型马铃薯播种机进行对比试验。试验在张掖市甘肃省机械科学研究院试验田内进行。配套动力13 kW,作业速度0.55 m/s,采用双垄作播种,播深18 cm,行距65 cm,株距40 cm。试验地地势平坦,土壤质地为壤土,含水量为18%。
试验测试的内容包括漏种率、重种率、株距变异系数等。拖拉机以正常速度0.55 m/s播种后,随机取10行,每行在50 m内随机取样,进行测试。试验结果见表1。
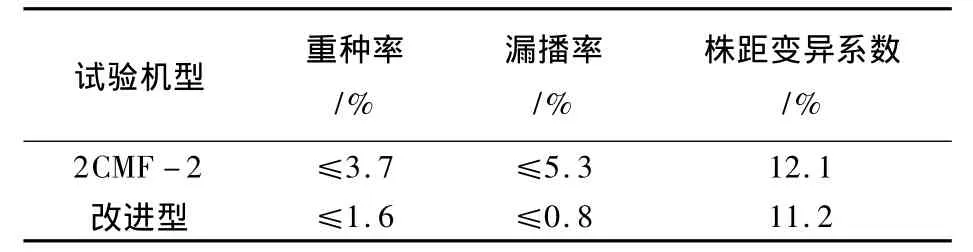
表1 试验测试结果
如表1所列,采用设计的新型排薯器后重种率、漏播率显著降低,体现了机电控制补薯装置的准确性和有效性。株距变异系数变化不大,这主要是因为株距的均匀性主要取决于工作过程中投薯点高度的变化,而投薯点高度的变化又与种薯大小及土壤不平度密切相关,尽管播种前采用了种薯分级措施,但效果并不明显。
4 结论
(1)设计了一种马铃薯播种机排薯器,主要由种薯箱、升运装置、补薯装置、振动装置、限流装置、张紧装置、排薯管等组成,能够根据播种过程自动检测漏播现象,并进行漏种补偿。
(2)试验表明:重播率≤1.6%,漏播率≤0.8%,株距变异系数约为11.2%。表明所设计的排薯器显著改善了马铃薯播种机的播种效果,具有较好的推广应用前景。
[1] 宋言明,王芬娥.国内外马铃薯机械的发展概况[J].农机化研究,2008(9):224-227.
[2] 廖廷茂,王 为,李小昱.我国马铃薯种植机的现状与分析[J].湖北农机化,2007(3):35-36.
[3] 赵满全,窦卫国,赵士杰,等.2BSL-2型马铃薯起垄播种机的研制[J].内蒙古农业大学学报,2001,22(1):101 -104.
[4] 周桂霞,张国庆,张义峰.2CM—2型马铃薯播种机的设计[J].黑龙江八一农垦大学学报,2004,16(3):53-56.
[5] 高明全,张旭东,刘维佳,等.2CM-2型马铃薯播种机关键部件的设计[J].沈阳农业大学,2012,43(2):237 -240.
[6] 赵润良.BMF-1马铃薯播种机的研制[J].农机化研究,2012(10):100-102.
[7] 张波屏.现代种植机械工程[M].北京:机械工业出版社,1997.