三菱PLC与YAMAHA机器人在离合器自动线上的应用
2015-05-11王明睿李培申
王明睿,李培申,郭 瑞,吕 炯
(北京机械工业自动化研究所,北京 100120)
三菱PLC与YAMAHA机器人在离合器自动线上的应用
王明睿,李培申,郭 瑞,吕 炯
(北京机械工业自动化研究所,北京 100120)
0 引言
三菱Q系列PLC提供了实现完整控制任务的能力和灵活性。其功能强大的处理器指令集、高级的编程工具以及可扩展的产品功能使其成为目前应用最为广泛的PLC之一,研究其余外围机器人的控制策略对装配自动化领域有着重要意义。本文通过对离合器自动装配线的研究制作基础上,实现了Q系列PLC与雅马哈机器人的通讯及控制,完成了离合器自动装配过程中的辊铆工位的研制。
1 硬件总体设计
Q系列PLC与YAMAHA机器人控制器相连需要连接机器人的急停信号、故障信号,通过CCLINK与PLC的QJ16BT11N连接能够达到控制机器人的基本要求。
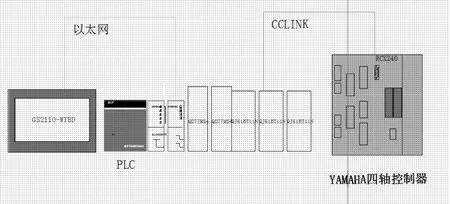
图1 通讯原理图
CC-LINK的通讯原理是基于数据链接和自动刷新的原理。具体如下:PLC分别在CC-LINK模块和CPU中开辟出一块内存缓冲区(BFM),其中,CC-LINK模块中的BFM和YAAHA机器人的输入相对应(I/O或RWw,RWr),通过“数据链接”接受从站的数据变化,同时,把数据传送到CPU中的BFM。而CPU模块中的BFM通过“自动刷新”的方法接受从站的数据变化。
建立PLC与YAMAHA机器人通讯收发数据对应关系如表1所示。
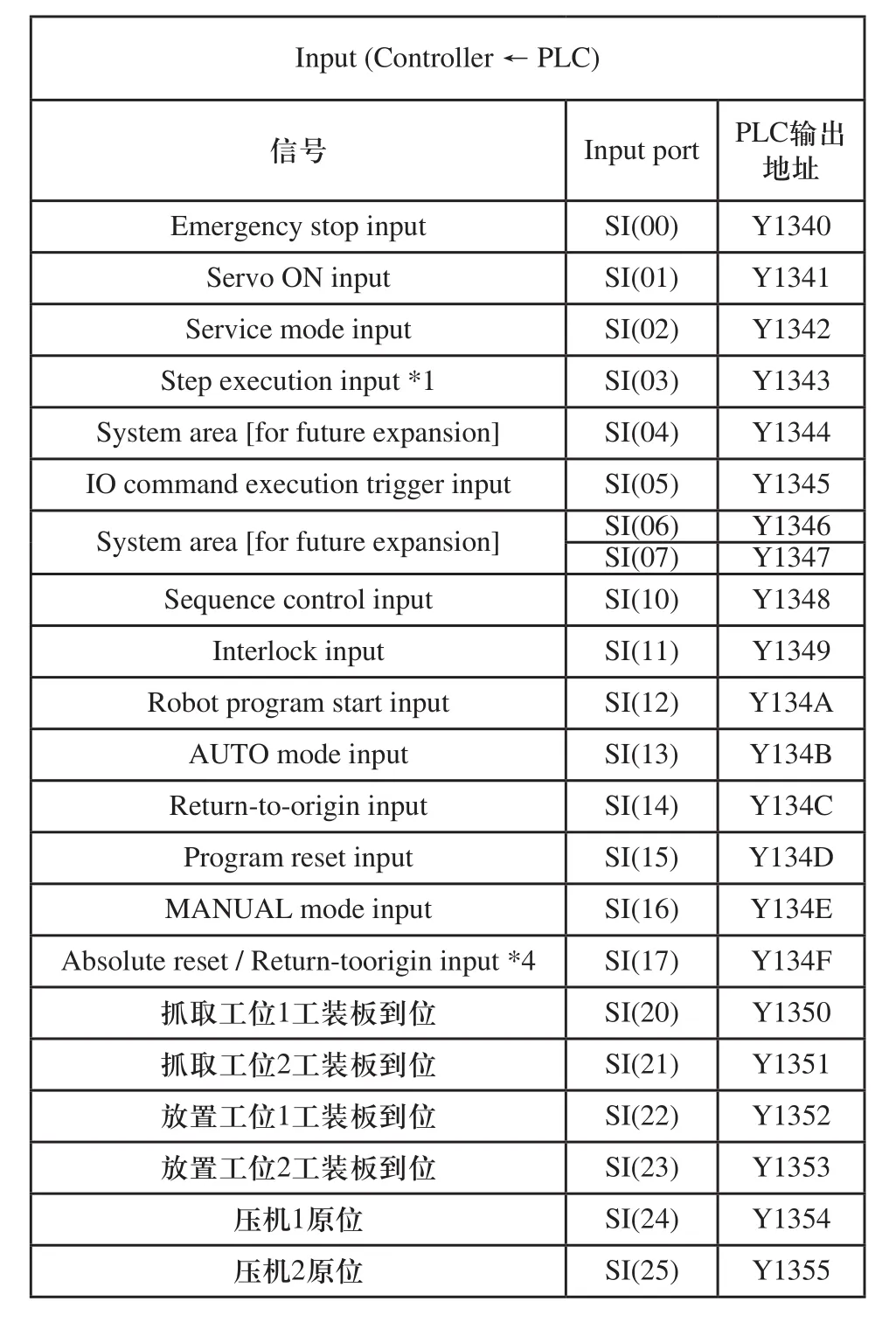
表1 PLC与YAMAHA通过CCLINK通信收发数据格式
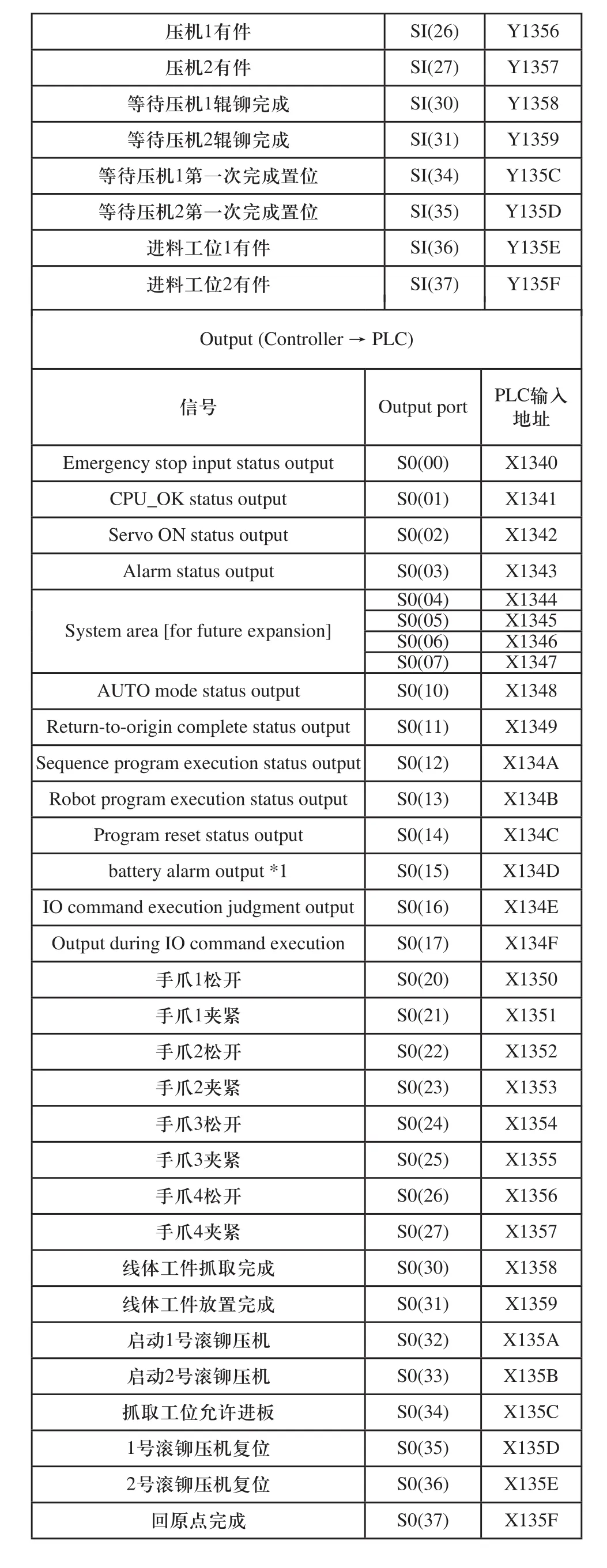
表1 (续)

图2 工作动作位置图
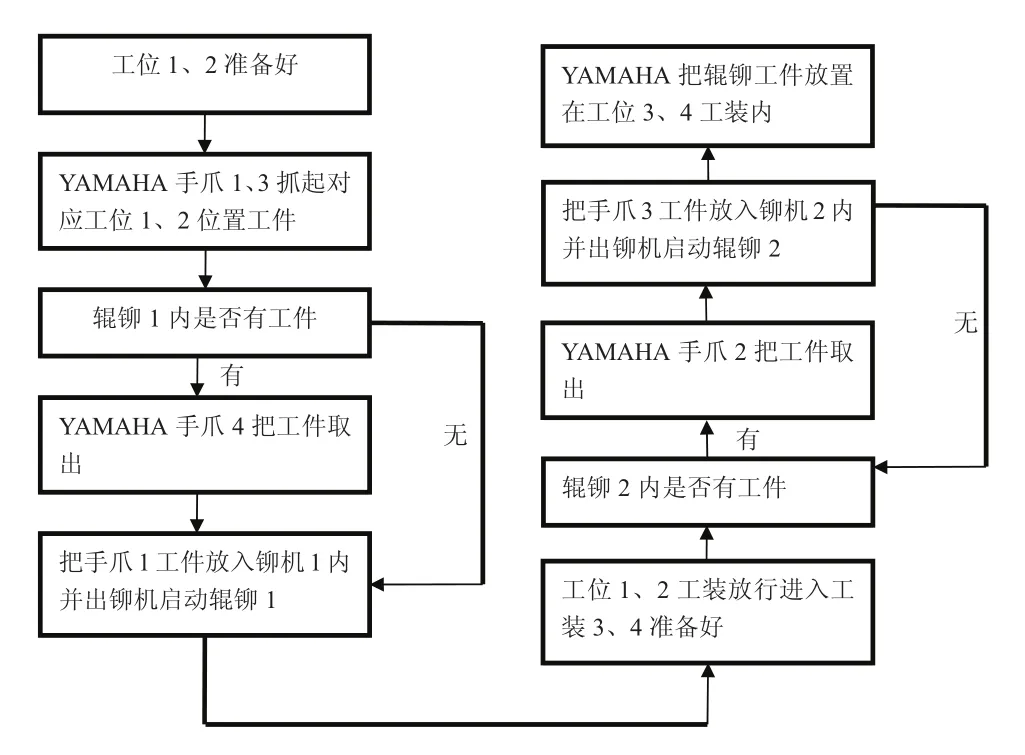
图3 软件流程图
2 软件流程分析
以下为机器人软件编程编程部分语句及解释:

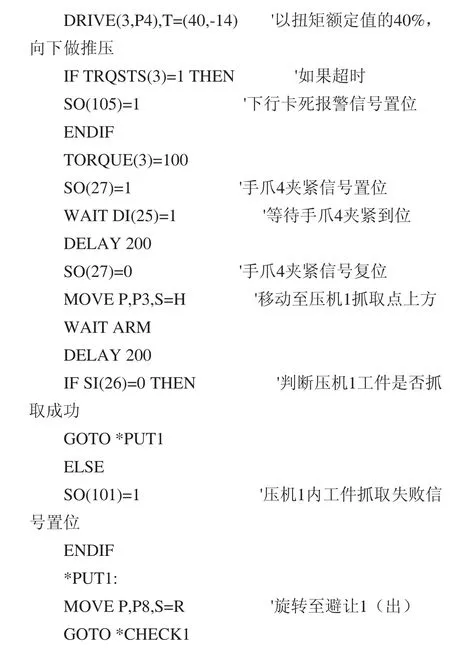
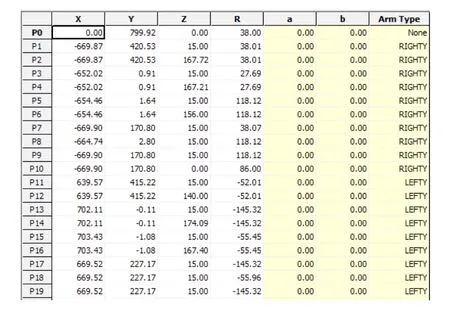
图4 机器人示教点位信息
3 结束语
通过对三菱Q系列PLC与雅马哈机器人的通讯及控制,完成了离合器自动装配过程中辊铆工序的研制。PLC与机器人通过CCLINK通讯传递的方式实现联动应用于自动生产线领域,具有很好的示范作用;可以应用于其他的机器人应用,另外参考PLC与机器人的控制方式及控制策略,可以实现大部分的机器人的控制,具有很好的推广效应。
[1]阳胜峰,谭凌峰.三菱FX/Q系列PLC快速入门手册[M].中国电力出版社,2009.
[2]李绍炎.自动机与自动线[M].北京:清华大学出版社,2007.
Application of the MITSUBISHI PLC and YAMAHA robot in the clutch automatic line
WANG Ming-rui, LI Pei-shen, GUO Rui, LV Jiong
介绍了用三菱Q系列PLC与雅马哈机器人共同完成离合器自动线滚铆工位的控制策略,利用三菱CCLINK总线与YAMAHA机器人组态,使PLC与机器人进行通讯,并与机器人完成定位、抓取、放料、工作等相应动作。
机器人;PLC;总线;控制策略
王明睿(1982 -),男,工程师,硕士,研究方向为新能源及家电行业装配自动化生产线、机器人应用。
TP273
B
1009-0134(2015)12(上)-0106-03
10.3969/j.issn.1009-0134.2015.23.31
2015-07-28
