基于Galil卡的管道扫查器控制设计
2015-05-11陶泽勇周路生
陶泽勇,刘 震,周路生,田 野
(国核电站运行服务技术有限公司,上海 200233)
基于Galil卡的管道扫查器控制设计
陶泽勇,刘 震,周路生,田 野
(国核电站运行服务技术有限公司,上海 200233)
0 引言
主管道是核电站核承压边界的重要组成部分。同时,主管道连接焊缝是核电站核管道现场安装过程中实施难度较大、产生问题较多的焊缝,且一旦核电站投入运行,其将长期工作于高温高压高辐射环境下,易于形成疲劳损伤。因此,依据核电站建造、安装和运行相关标准包括ASME规范和RSEM标准,对上述焊缝进行定期质量检查是核电站役前和在役检查的重要内容,它们的质量对于保障一回路系统的完整性至关重要[1]。
在核电站运行过程中,主管道处在辐射环境下,对其焊缝进行超声检测工作的难度极大,耗资昂贵。用人工作业通常存在效率低,时间长,可重复性差,定位误差大等问题,且对操作工人的身体健康有较大危害。发达国家如美国、英国、丹麦和日本等国均在该领域做过深入研究并形成自己的管道焊缝检测装置产品[2]。本设计针对管道直径从300mm~1000mm,研究设计了一个基于Galil DMC控制器的管道自动检测系统,可以实现管道焊缝超声检测的自动化操作,且该系统具有良好的扩展性和稳定性。
1 管道扫查器基本功能方案
对于管道焊缝进行检测常用的方法有超声或射线检测,因射线检测无法对缺陷进行定量,故通常采用超声检测方法[3]。管道扫查器由导轨、扫查运动机构、探头组件、伺服电机、控制线缆和超声信号线缆组成。上位控制计算机根据预先设定的扫查条件(如检测范围,扫查方式、检测速度等),在上位机软件控制下,驱动安装在管道扫查器上的两个电机实现相对管道环焊缝方向的运动。其中一个电机驱动扫查器沿着管道圆周方向运动,另一个电机驱动探头调整模块来带动探头组件完成沿管道轴向的往复运动,实现对管道环焊缝全范围、高精度的超声检测。扫查方式通常有两种,一种是轴向栅格扫查(即垂直焊缝方向扫查),这种扫查方式下超声探头组件沿着与焊缝垂直的方向往复运动,周向运动电机每步进一个固定长度(即扫查间距),轴向电机随机切换扫查方向;另一种是周向栅格扫查(即平行焊缝方向扫查),这种扫查方式下扫查器沿着平行焊缝的方向作旋转运动,轴向电机每步进一个固定长度,扫查器随即反向运动。周向(平行焊缝)和轴向(垂直焊缝)栅格扫查方式如图1所示。超声探头耦合剂选择去离子水,通过水泵和水流收集器实现耦合剂水的重复利用。控制方式选择PC+运动控制卡+伺服电机+以太网的开放式运动控制平台,易于搭建并利于后续功能的扩展。

图1 管道扫查器扫查方式示意图
2 控制系统硬件组成
控制系统主要由上位控制计算机、运动控制卡、电机驱动器、直流伺服电机、耦合剂水泵、网络摄像头构成。控制核心选用Galil DMC2143四轴运动控制卡,Galil DMC系列运动控制卡采用32位微处理器,通过高速以太网与PC 机进行数据通信,适用于单轴或多轴的运动控制,且各轴可设为独立的伺服电机和步进电机控制轴,能提供速度控制,点对点定位,2D线性及圆弧插补,电子齿轮等多种运动模式[4]。电机驱动器选择Galil AMP20540驱动器,该驱动器可为每轴提供500W,驱动多达4轴的有刷或无刷电机。同时AMP20540可通过96针的DIN接口与DMC2143无缝对接,极大地简化了系统接线,提高了控制系统的稳定性。管道扫查器控制系统硬件组成如图2所示。
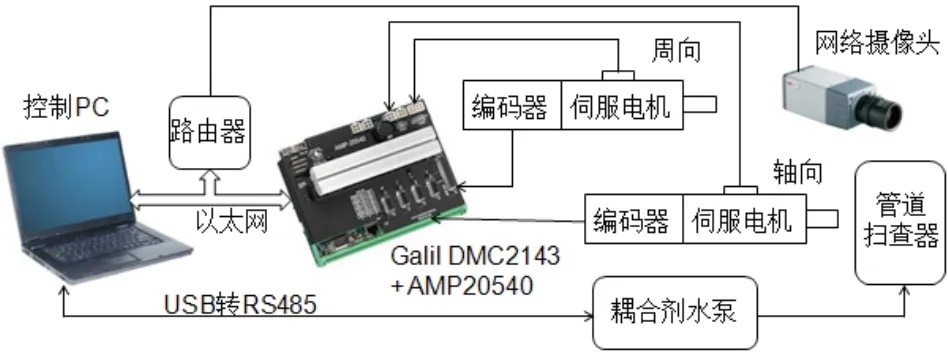
图2 射线装置系统组成
电机的选择应结合扫查速度、丝杠参数、摩擦力等因素综合考虑,周向和轴向电机均选择Maxon RE系列直列有刷伺服电机[5],配置HEDL5540增量编码器,电机主要参数如表1所示。

表1 电机参数表
上位控制PC机主要用于完成程序逻辑,设定系统参数,实时显示扫查器位置状态,读取电机参数,是扫查器和操作者进行交流的人机界面。Galil DMC运动控制卡作为下位机,通过以太网接口接受上位控制PC机发送的控制信号,同时将系统实时运行状态信息通过以太网总线传送给上位机。
耦合剂水泵选择便携式医用齿轮泵,泵的起停和水流速度均可通过RS485接口总线来控制。为了便于观察运动过程中超声探头与管道表面的贴合情况,在管道扫查器上安装网络摄像头,其采集到的图像通过以太网实时传送给上位控制计算机。
3 控制系统软件设计
系统软件主要具有以下功能:界面显示、人机交互、视频显示、水泵控制、电机闭环控制等。从程序实现上,应包括:系统准备模块、手动控制模块、自动扫查模块、系统状态监控模块和系统功能状态调试模块等。上位机程序采用VC++编写,主要实现指令的发送、扫查参数的设定、实时位置信息显示和上下位机通信等功能。上位机程序主要通过Galil提供的API函数来编写。下位机软件为Galil DMC卡内运动控制程序,控制程序根据Galil特有的两字符命令集编写,程序编写完成后可由上位机通过DMCDownloadFile()函数从硬盘下载到卡内并可根据需要随时启动运行。

图3 系统软件功能模块组成

图4 扫查软件程序流程图
4 结束语
本文给出了管道焊缝扫查器自动化控制方法,控制系统以Galil DMC2143为核心,完成对伺服电机的控制、耦合剂水泵的控制,并辅以网络高清摄像头,实现了管道焊缝超声检测的可视化和高精度定位。管道扫查器试验结果表明控制系统运行平稳,定位精度符合要求。
[1]压水堆核电厂核岛机械设备设计规范[M].中国标准出版社,1996.12.
[2]李娜.国外管道焊缝缺陷超声波检测现状[J].机械工程师,2008,(12):148-149.
[3]曹先伟.管道环焊缝扫查机器人研究[D].哈尔滨工程大学,2009.
[4]DMC-21x3 Amplifiers & Accessories.DMC控制卡使用手册[Z].2008.
[5]Maxon电机使用手册[Z].2012.
Control design of pipe scanner based on galil card
TAO Ze-yong, LIU Zhen, ZHOU Lu-sheng, TIAN Ye
为了提高管道焊缝超声检测的自动化程度,设计并制作了管道焊缝自动扫查器的控制系统。管道扫查器以Galil DMC为控制核心,完成周向和轴向运动控制、耦合剂水泵远程控制。采用CCD摄像头实时显示机构运动和系统的定位状况。管道扫查器试验结果表明该系统运行平稳,定位精度满足要求。
运动控制卡;管道焊缝;扫查器;控制系统
陶泽勇(1983 -),男,硕士研究生,主要从事核电机器人的研究工作。
TP242
B
1009-0134(2015)12(上)-0108-02
10.3969/j.issn.1009-0134.2015.23.32
2015-08-06
