牵引供电系统故障的基于模型诊断方法研究
2015-05-10刘志刚戴晨曦胡轲珽
高 松, 刘志刚, 戴晨曦, 胡轲珽
(1. 西南交通大学 电气工程学院, 四川 成都 610031;2.四川电力设计咨询有限责任公司,四川 成都 610041)
牵引供电系统故障会对列车的安全运行造成重大影响,因此发生故障后,应及时进行故障查找和排除,缩短维修时间,尽快恢复供电[1-2]。
在牵引供电系统智能故障诊断方面,目前研究较多的是基于专家系统的故障诊断以及Petri网智能推理诊断。文献[3]构造了基于监控和保护综合自动化的专家系统,该系统能够进行继电保护和断路器故障诊断等。文献[4-6]采用基于经验知识的专家系统分析判断牵引供电系统故障。专家系统可以方便地把保护和断路器的动作逻辑以及专家经验直观、模块化地表示出来,但难以创建完备的知识库,经验知识获取时间长,不能诊断经验之外的故障。文献[7]将Petri网应用于牵引供电系统故障诊断,但需附加判别规则才能进行诊断。文献[8]将模糊Petri网引入高速铁路牵引供电系统的故障诊断中,使用两次推理以提供更全面的诊断信息。Petri网模型的建立求解较为繁琐,同时Petri网的建立,变迁权值的确定,反向搜索的实施均要用到专家经验[8-9]。
基于模型诊断MBD(Model-based Diagnosis)的方法是根据系统的结构和功能原理建立诊断系统的原理模型从而对故障进行诊断,其能很好地克服专家系统的不足[10]。该方法自提出就有许多学者进行了深入的研究[11-12]。在电力系统的应用也日益增多,如分析保护装置的动作正确性[12],电网故障分析与定位[13-14],牵引变电所[15]、牵引变压器[2]的故障诊断等。
基于此,本文将MBD方法引入牵引供电系统故障诊断中。文中首先给出一个牵引供电系统故障诊断方案,并以京津城际永乐段为例,详细论述了系统元件抽象、系统建模、离线冲突集获取、系统在线诊断等MBD故障诊断的关键步骤。最后本文给出了一个测量元件故障的解决方法,使诊断系统在某个测量元件发生故障,导致测量数据错误情况下仍能正常工作。
1 基本理论介绍
1.1 基于模型诊断的基本理论简介
诊断系统可以表示为:SD,COMPS,OBS。其中SD为系统模型,COMPS为组成系统的元件集合,OBS为系统观测变量。基于模型诊断的基本思想见图1,其相关概念介绍如下[10-11]
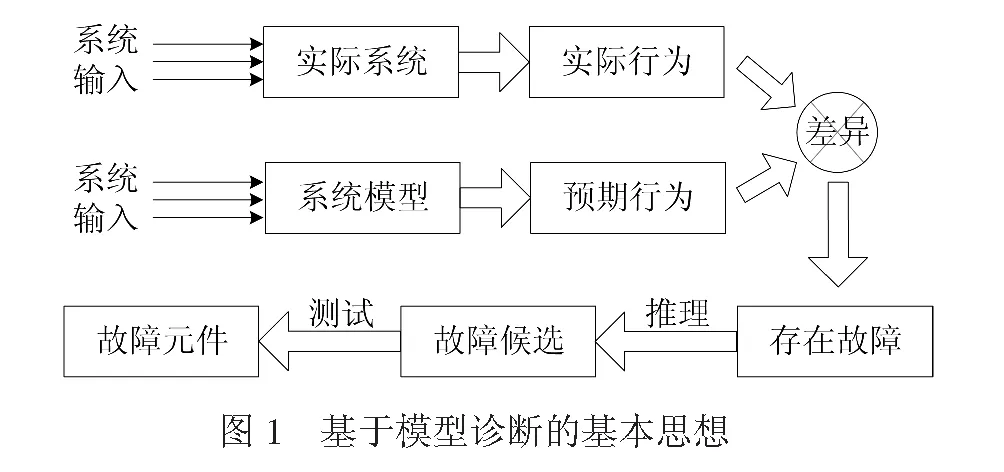
(1) 设元件集合C={c1,c2, …,cn}且C⊆COMPS,当SD∪OBS∪{ab(c1),ab(c2),…,ab(cn)}是不可满足的,则此元件集合C为系统的冲突集CS。其中ab(ci)表示元件ci正常。
(2) 设CSs是一个由冲突集组成的冲突集簇,当集合HS满足如下关系时,HS为系统的一个碰集(hitting set)。

( 1 )
(3) 解析冗余关系是由系统模型SD得到x+y+z=0的方程。其中x、y、z为系统观测变量。给定观测值x、y、z, 可求得方程与0的差值r为残差。最小候选冲突集(MinCSC)为解析冗余关系的最小支撑环境[16],它可能是一个最小冲突集,但需要经过在线观测数据确定。
1.2 牵引供电系统故障诊断方案
基于模型的牵引供电系统故障诊断过程主要包括:元件抽象、系统建模、求取候选冲突集、冲突识别、诊断鉴别等阶段。基于MBD牵引供电系统故障诊断框图见图2。
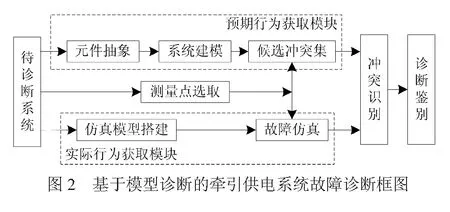
实际行为仿真模块是为验证基于模型方法有效性而设立的,目的是获取故障数据。对于实际工程诊断系统则不需要此模块,直接从实际工程系统采集故障数据。
预期行为获取模块及冲突识别和诊断鉴别过程为基于模型诊断的核心部分,主要叙述如下:
(1) 元件抽象和系统建模 分析系统主要结构和关键部件,抽象出核心元件再建立系统各个核心元件模型。在具体的建模方法上,采用分层结构抽象模型:第一层建立小元件模型,描述小元件的正常行为;第二层建立大元件模型,描述大元件中各个小元件的故障行为及小元件之间的故障行为。分层模型将小元件间的拓扑故障转化为大元件的内部故障,有利于故障的分析[1-2]。
(2) 候选冲突集求取 用于描述诊断系统的变量为系统变量,其中可观测的为观测变量,余下的为中间变量。通过冲突集求解算法消去系统中间变量,求得只剩观测变量的解析冗余关系,进一步获得解析冗余关系的支撑环境,即最小候选冲突集。
(3) 冲突识别 将观测值带入解析冗余关系中,筛选最小候选冲突集,以获得最小冲突集,通过碰集算法求得诊断系统碰集,即诊断候选。
(4) 诊断鉴别 对诊断候选进行故障匹配,依次匹配元件各种故障,若满足阈值要求,则为最终的故障类型。
2 牵引供电系统的建模
京津城际是我国第一条高标准、设计时速为350 km的高速铁路。高速正线采用2×25 kV(AT)供电方式,牵引供电系统由2座牵引变电所和4个供电臂构成。本文选用京津城际永乐段进行实例建模分析。此段接线见图3。
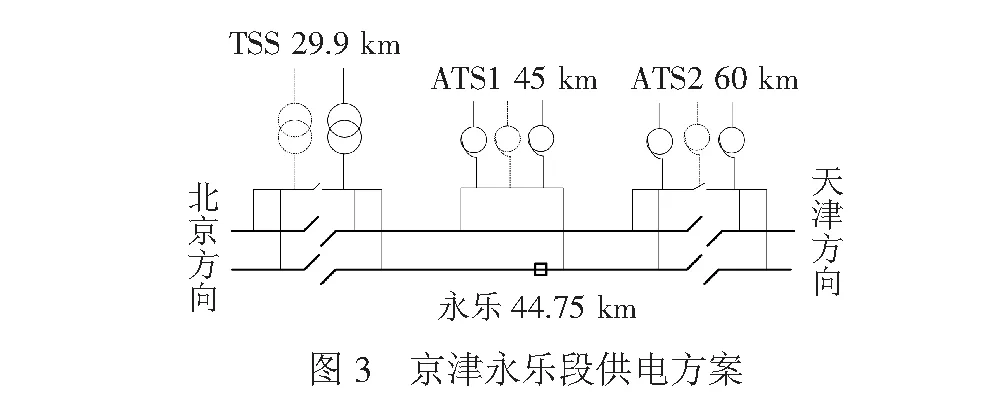
TSS (Traction Substation)为牵引变电所,安装4台220/2×27.5 kV专用三绕组变压器,每2台作为一组,采用直列运行方式,任何情况下一组运行一组备用。ATS1为AT所(Auto-Transformer Station),3台AT变压器2主1备运行,ATS2为分区所,2台AT变压器分别运行在左右供电臂,1台备用。
2.1 系统元件的抽象
系统元件的抽象是牵引供电系统建模的基础,一个牵引供电系统主要包括牵引变压器、AT变压器、接触网、正馈线、母线、隔离开关、断路器、电压电流互感器等设备以及这些设备间的连接线。牵引变压器的建模研究在文献[2]已被讨论过,此处不再赘述。为简化起见,本文将隔离开关、断路器等设备当作母线或者连接线的一部分处理,不作为单独的故障诊断元件。因此,京津城际永乐段一共2个AT段,每段上下行接触线和正馈线单独作为1个设备元件,一共4个接触网设备,4个馈线设备。牵引变电所、AT所、分区所内的T、F母线均无横向分段,则每个所里面只有2个母线设备元件,即T母线,F母线,一共6个设备元件。ATS1内2台AT变压器、ATS2内1台AT变压器运行,共3个自耦变压器设备。考虑到模型拓扑表达方便,上下行T、F线引出到ATS1处的接线节点作为单独的设备处理,但无故障模式。因此一共21个小元件设备。
变电所、AT所、分区所内的T相F相母线以及两个AT段内的接触网、馈线分别合并成一个大设备元件。AT变压器单独作为自己的大元件设备,因此一共12个大元件设备。部分元件设备符号及其含义见表1、表2。

表1 部分小元件符号及其所代表的含义

表2 部分大元件符号及其所代表的含义
2.2 系统元件建模
系统模型分为正常模型和故障模型,正常模型建立在小元件的设备描述中,用来进行一致性推理判定系统正常与否;故障模型建立在大元件的设备描述中,用来进行溯因推理,判定故障的具体类型。
(1) 母线模型
正常情况下,流入与流出单相母线的电流是平衡的。因此对于m条进线n条出线的单相母线,其约束方程为
( 2 )

T、F两相母线存在的故障有TF短路以及各相接地短路,不考虑母线断线情况。以T母线为例,T母线接地短路,则Vt=0;TF两相母线短路时,则
( 3 )

(2) 牵引网
本文在故障诊断过程中所使用的观测信息以故障发生后断路器跳闸前为基础,假设故障发生后机车自保护退出运行,则一个AT段内T线、F线均满足输入电流等于输出电流,即Iin=Iout。
故障模式以F线为例,F线发生的故障有近端接地短路远端断线(ground_breakF)、远端接地短路近端断线(breakF_ground)、短路接地(goundF)、断线(breakF)、TF短路(shortTF)等故障。
当近端短路远端断线时:Iin≠0,Iout=0;
当远端短路近端断线时:Iin=0,Iout≠0;
当发生断线故障时:Iin=Iout=0;
当发生短路接地故障时:则F线两端电流均流向短路点,即电流相位差为180°;
当T、F相短路时
( 4 )
(3) AT变压器
对于AT变压器,本文只简单的考虑其三线流入电流之和为0,而不考虑其变比是否符合要求,暂不设置AT变压器故障情况。
(4) 引出线节点
引出线节点为牵引网引出线到AT变电所的接线点,为一个三线高斯节点,则流入节点电流之和为0。不考虑其故障模型。
3 测量点及候选冲突集
3.1 测量点的选取
对牵引供电系统进行故障诊断时,需要提取系统的信息量,主要包括母线电压,各母线流入流出电流值。测量点选择不同,则系统获得的离线解析冗余关系不同,对系统的诊断效率也有影响。本文参考实际的京津城际测量元件的布置,信息量的提取包括变电所和AT所信息提取,其详细测量元件布置见图4。

变电所只考虑一个供电臂供电,测量元件只包括图4(a)中右侧部分,测量值包括T相母线流入电流It_TSS,上下行T相流出电流It_TSS_Up、It_TSS_Down,以及电压Vt_TSS。AT所测量值包括T相上下行流入母线电流It_ATS1_UpIn、It_ATS2_DownIn, 以及母线流出到AT变压器的流出电流It_ATS1_UpAt、It_ATS1_DownAt。分区所同AT所测量值一样,只少一个AT变压器。同样F相也均有上述各测量值。AT所分区所还需要测量从轨道流入AT变压器的电流Ir_ATS1_UpAt、Ir_ATS1_DownAt、Ir_ATS2_At。因此整个牵引供电系统共29个测量值。
3.2 解析冗余关系及最小候选冲突集的求取
最小冲突集的求取有多种方法,本文利用文献[15]中的方法,先求取解析冗余关系,再充分利用解析冗余关系所隐含的信息,利用关系导向算法RGA求取最小冲突集候选。求得该牵引供电系统13个解析冗余关系以及其对应的最小候选冲突集。例如MinCSC9为最小冲突集候选,即{NU_F,S1U_F,S2U_F}为最小冲突集候选,其对应的解析冗余关系为-If_TSS_Up+If_ATS2_UpIn+If_ATS1_UpIn=0。所有的最小冲突集候选为MinCSC1:{T1ATS1};MinCSC2: {TATS2};MinCSC3: {BATS2_T};MinCSC4: {BATS2_F}; MinCSC5: {T2ATS1}; MinCSC6: {BTSS_T}; MinCSC7: {NU_T,S1U_T,S2U_T}; MinCSC8: {BTSS_F}; MinCSC9: {NU_F,S1U_F,S2U_F}; MinCSC10: {ND_T,S1D_T,S2D_T}; MinCSC11:{ND_F,S1D_F,S2D_F}; MinCSC12: {BATS1_T}; MinCSC13: {BATS1_F}。最小候选冲突集中各元件是通过解析冗余关系求得,它们之间的联系表现在解析冗余关系中,其中任意元件故障均会导致相关联的解析冗余关系不满足。当诊断系统的观测量确定后,最小候选冲突集固定不变,发生任何故障都会导致其中某一个或几个候选所对应的解析冗余关系不满足,因此需要通过在线观测量判定是否为最小冲突集。
4 牵引供电系统故障的在线诊断
4.1 获取仿真故障数据
通过Simulink搭建京津城际永乐段供电系统模型,假设ATS1中T母线接地,第2个AT段内离ATS1变电所5 km处上行F线断线,且近端接地短路。仿真获得此故障情况下各测量元件的测量值见表3、表4。

表3 故障情况下电压互感器的测量值

表4 故障情况下电流互感器的测量值
4.2 冲突集识别及候选诊断产生
将表3、表4中测量值分别带入各个最小冲突集候选所对应的解析冗余关系,计算结果见表5。以解析冗余关系x+y+z=0为例,由于建模精度以及故障等原因,使得r=x+y+z≠0,r即绝对残差,x、y、z中幅值最大者为最大项,绝对残差和最大项比值即相对残差。

表5 解析冗余关系的残差
将系统正常测量值的数据带入各个解析冗余关系,发现由于模型本身存在的误差,所有解析冗余关系的相对残差r′均为趋于零的非零值。因此以系统正常时解析冗余关系相对残差为参考依据,设定r′=0.001为系统故障的阈值。系统发生故障后,若某个最小候选冲突集对应的解析冗余关系的相对残差大于0.001时,则判定其为最小冲突集。
从表5中可以看出,MinCSC9和MinCSC12的相对残差r′明显比系统故障阈值0.001大了很多,因此判定其为系统最小冲突集。即最小冲突集簇为CSs={MinCSC9,MinCSC12}即CSs={{NU_F,S1U_F,S2U_F},{BATS1_T}}。
利用碰集算法[17]计算出最小冲突集的最小碰集,得到3个候选诊断集,{{NU_F,BATS1_T},{S1U_F,BATS1_T},{S2U_F,BATS1_T}}。其中因为NU_F为节点设备,无故障。因此最终的候选诊断为{{S1U_F,BATS1_T},{S2U_F,BATS1_T}}。
4.3 诊断鉴别
通过一致性诊断推理,只能求得故障候选诊断,还需要进一步通过溯因推理确定故障元件的具体故障模式。溯因推理的过程中,用故障候选设备的具体故障约束模型代替其正常约束模型,再重新计算整个系统的解析冗余关系,若所有故障数据均满足新求得的解析冗余关系,则故障模式匹配成功,当前故障类型即为最终的故障。具体的推理流程图见图5。

按照图5流程图,对牵引供电系统故障进行匹配,最终匹配故障结果为{{BATS1_T,groundT}, {S2U_F,groundF_breakF}},即ATS1中T母线,第2个AT段内上行F线近端接地远端断线,与假设相符。整个故障识别过程用了1.437 s准确地判断出了系统故障,具有很好的实时性。
4.4 分析讨论
为进一步验证基于模型诊断方法应用于牵引供电系统故障诊断的有效性,对牵引供电系统设置不同部位故障和不同类型故障,再利用本文方法进行故障诊断,诊断结论与诊断时间见表6所示。
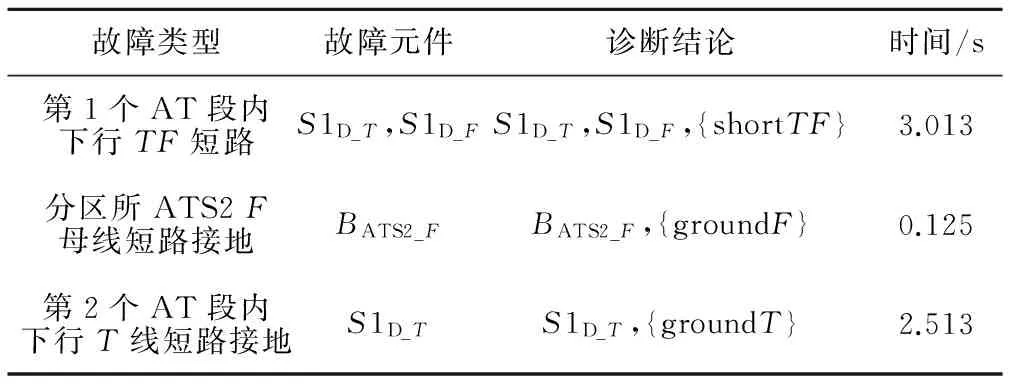
表6 诊断方法有效性验证
由表6可见,牵引供电系统不同位置和类型的故障,采用本文方法都可快速准确地得到诊断结论。
基于模型诊断分为一致性推理和溯因推理2部分。通过碰集求解获得候选诊断为基于一致性推理,该过程只需判断故障数据是否满足解析冗余关系即可获得冲突集,并通过计算碰集得到候选诊断,整个过程耗时为毫秒级,十分适合作为速断保护整定,迅速切断故障以减小故障影响。通常情况下,候选诊断的空间非常小,因此可以考虑引入故障免除假设进一步限制候选诊断,添加测量点或优化测量点布置使候选诊断惟一化,此时一致性诊断结果则可动作于断路器,迅速切断故障。故障匹配过程为溯因推理部分,其需要建立系统元件的故障模型,同时推理过程的复杂度同系统故障元件和故障种类均有关,较为耗时。若引入元件故障概率,优先匹配故障概率较高的模式,则会加快匹配过程。故障匹配结果为具体的故障模式,在断路器动作于一致性诊断结果后,其可为牵引网故障测距提供便利,以尽快修复故障恢复系统供电。
5 测量元件故障的解决方法
现有的牵引供电系统故障诊断方法,若测量元件故障则给出错误的诊断结果,必须后期人工检查才能确定测量元件的故障。基于模型诊断方法是基于系统的工作原理进行故障诊断的,当某一个测量元件发生故障时,诊断系统判定系统工作异常,但通过故障匹配却不能匹配出具体的故障,这是因为一个错误的测量结果是不可能满足系统某一个具体故障的约束关系。同时,基于模型诊断方法是通过悬挂约束和数据传播进行故障诊断的,缺省一个测量元件,系统诊断系统能牺牲时间为代价诊断出具体故障。因此,本文给出一个测量元件N-1方式的故障解决方案。具体流程图见图6。

仍假设ATS1中T母线接地,第2个AT段内,离ATS1变电所5 km处上行F线断线,且近端接地短路。假设系统发生前述故障类型的同时,测量元件发生故障致使It_ATS1_UpIn测量值为0。
由于It_ATS1_UpIn故障,系统的最小冲突集簇变为CSs={MinCSC7,MinCSC9,MinCSC12},比无测量元件故障时多了冲突集MinCSC7。3个冲突集对应的解析冗余关系分别为
MinCSC7:
-It_TSS_Up+It_ATS2_UpIn+It_ATS1_UpIn=0
MinCSC9:
-If_TSS_Up+If_ATS2_UpIn+If_ATS1_UpIn=0
MinCSC12:
-It_ATS1_UpIn-It_ATS1_DownIn+It_ATS1_UpAt+It_ATS1_DownAt=0
因此测量元件集合
ME={It_TSS_Up, It_ATS2_UpIn,It_ATS1_UpIn,If_TSS_Up,If_ATS2_UpIn,
If_ATS1_UpIn, It_ATS1_UpIn, It_ATS1_DownIn, It_ATS1_UpAt, It_ATS1_DownAt}
按照流程图6,首先去掉It_ATS1_UpIn测量值对系统重新进行诊断,求得系统最小冲突集候选12个,带入除It_ATS1_UpIn外其他测量值,判断出最小冲突集为MinCSC8={NU_T,S1U_F,S2U_F},MinCSC12=BATS1_T,NU_T,S1U_T,S2U_T}。通过计算碰集和故障匹配成功地实现了故障诊断,因此判定It_ATS1_UpIn测量元件故障。整个过程耗时8.079 s。
若假设It_ATS1_UpIn=1.330 3×103<10.49以区别正常测量值It_ATS1_UpIn=2.330 3×103<13.49。分别去掉ME中一个元件,对系统重新进行故障诊断,各阶段运行时间见表7。其中只有去掉It_ATS1_UpIn时能对故障进行正确匹配。

表7 消去各测量元件后故障诊断运行时间
系统故障诊断主要的时间耗费在故障匹配上,而故障匹配时间与诊断候选集合个数、每个集合中元件个数以及每个元件的故障种类均有关系。
设某次诊断有a个诊断候选集合,每个候选集合中均有b个故障元件,每个故障元件均有m种故障类型。则此次诊断需要计算的次数为:amb。当去掉的测量元件为故障元件,则相应的最小冲突集会减少,诊断候选集合个数a以及候选集合中故障元件的个数b均跟着减少,因此最终的计算匹配时间明显比去掉其他测量元件的匹配时间少,如表7中去掉测量元件It_ATS1_UpIn的部分。
当一个测量元件发生故障,最终判定故障类型及故障的测量元件所需要消耗的平均时间为
( 5 )

6 结论
传统牵引供电系统故障诊断较多的是利用专家系统,根据保护和断路器动作信息来判断具体的故障。本文采用基于模型诊断的方法,直接利用牵引供电系统各电压电流量对牵引供电系统进行故障诊断。通过对京津城际永乐段牵引供电系统进行建模、仿真和实验验证,结果表明基于模型诊断方法能快速准确地诊断出包括接触网故障和AT所母线故障等单一或复合故障,并为牵引供电系统倒闸操作提供指导性意见以快速恢复非故障区域供电。
同时,本文提出了一种测量元件故障的解决方法,当诊断系统某个测量元件发生故障导致观测数据错误时,基于模型的故障诊断系统仍能快速的求解出具体的故障并实现故障测量元件的查找。
参考文献:
[1] 刘志刚,钟炜,邓云川,等.牵引变电站故障的基于模型诊断方法[J].中国电机工程学报,2010,30(34):36-41.
LIU Zhi-gang,ZHONG Wei,DENG Yun-chuan,et al. Electric Railway Substation Diagnosis With Model-based Method[J]. Proceedings of the CSEE,2010,30(34):36-41.
[2] 高松,刘志刚,徐建芳,等.基于模型诊断和专家系统的牵引变压器故障诊断研究[J].铁道学报,2013,35(7):42-49.
GAO Song,LIU ZHI-gang,XU Jian-Fang,et al.Research on Fault Diagnosis for Traction Transformer on the Basis of Model-based Diagnosis and Expert System[J].Journal of the China Railway Society,2013,35(7):42-49.
[3] 贺威俊,陈小川,高仕斌,等.牵引变电站综合自动化与专家系统应用研究[J].铁道学报,1996,18(2):6-10.
He Wei-jun,Chen Xiao-chuan,Gao Shi-bin,et al.Study on Integrated Automation and Application of Expert System for Traction Substations[J].Journal of the China Railway Society,1996,18(2):6-10.
[4] XIE Shao-feng,LI Qun-zhan.Application of Expert System Based on Mixing Reasoning in Traction Substation Fault Diagnosis[C]//The 2nd International Workshop on Autonomous Decentralized System.Chengdu:IEEE Press,2002:229-232.
[5] 庄慧敏,陈小川.牵引变电所保护动作行为分析专家系统设计[J].继电器,2003,31(2):41-42,63.
ZHUNAG Hui-min,CHEN Xiao-chuan.Expert System Design on Analysis of Relay Protection’s Action at Substation[J].Relay,2003,31(2):41-42,63.
[6] 王牣,陈小川,高仕斌,等.铁路客运专线供电自动化系统关键技术研究[J].铁道学报,2009,28(3):116-119.
WANG Ren,CHEN Xiao-chuan,GAO Shi-bin,et al.Study on the Key Problems of the Power Supply Automation System for Railway Passenger Dedicated Lines[J].Journal of the China Railway Society,2009,28(3):116-119.
[7] 张伟,郭其一.一种基于Petri网技术的牵引供电系统故障诊断方法[J].城市轨道交通研究,2004,(1):32-34.
ZHANG Wei,GUO Qi-yi.Fault Diagnosis of the Traction Substation on the Basis of Petri Nets Technology[J].Urban Mass Transit,2004,(1):32-34.
[8] 吴双,何正友,钱澄浩,等.模糊Petri网在高速铁路牵引供电系统故障诊断中的应用[J].电网技术,2011,35(9):79-85.
WU shuang,HE Zheng-you,QIAN Cheng-hao,et al.Application of Fuzzy Petri Net in Fault Diagnosis of Traction Power Supply System for High-speed Railway[J].Power System Technology,2011,35(9):79-85.
[9] 王磊,李耀华,刘志刚.基于OOCPN结线分析和反向推理的城市轨道交通牵引供电系统故障诊断方法[J].中国铁道科学,2012,33(4):52-59.
WANG Lei,LI Yao-hua,LIU Zhi-gang.Fault Diagnosis Method for the Traction Power Supply System of Urban Rail Transit Based on OOCPN Topology Analysis and Backward Reasoning[J].China Railway Science,2012,33(4):52-59.
[10] REITER R.A Theory of Diagnosis from First Principles[J].Artificial Intelligence,1987,32(1): 57-95.
[11] HAMSCHER W,CONSOLE L,KLEER J. Readings in Model-based Diagnosis[R].San Mateo: Morgan Kaufmann Publishers,1992:1-24.
[12] McArthur S D J,DYSKO A,McDonald J R,et al.The Application of Model Based Reasoning Within a Decision Support System for Protection Engineers[J].IEEE Transactions on Power Delivery,1996,11(4): 1748-1754.
[13] 胡非,刘志刚,范福强,等.配电网线路故障的基于模型诊断方法[J].电力系统自动化,2012,36(10):56-60.
HU Fei,LIU Zhi-gang,FAN Fu-qiang,et al.Distribution Network Line Fault Diagnosis with Model-based Method[J]:Automation of Electric Power System,2012,36(10):56-60.
[14] 关龙,刘志刚,何士玉,等.离散二进制粒子群算法在基于模型配电网故障诊断中的应用[J].电力自动化设备,2013,33(9):89-93.
GUAN Long,LIU Zhi-gang,HE Shi-yu,et al.Application of BPSO Algorithm in Model-based Fault Diagnosis of Distribution Network[J].Electric Power Automation Equipment,2013,33(9):89-93.
[15] LIU Z, HAN Z. Fault Diagnosis of Electric Railway Traction Substation with Model-based Relation Guiding Algorithm[J]. Expert Systems with Applications, 2014, 41(4):1730-1741.
[16] 林笠.基于ENV诊断模型的建立[J].暨南大学学报(自然科学版),2001,22(5):40-45.
LIN Li.The Construction of an ENV Model-based Diagnosis[J].Journal of Jinan University:Natural Science,2001,22(5):40-45.
[17] GAO Song, LIU Zhi-gang, DAI Chen-xi, et al. Application of BPSO with GA in Model-based Fault Diagnosis of Traction Substation[C]// 2014 IEEE Congress on Evolutionary Computation (CEC). Beijing: IEEE,2014:2063-2069.