常规与网络实时动态差分的比较与分析
2015-05-06韦延忠
韦延忠
(中国铁建十一局集团建筑安装工程有限公司,湖北 襄阳 441057)
常规与网络实时动态差分的比较与分析
韦延忠
(中国铁建十一局集团建筑安装工程有限公司,湖北 襄阳 441057)
随着全球卫星导航定位技术的快速发展,实时动态差分技术已在厘米级精度要求的测量与放样工程中表现出其无可比拟的优势。从载波相位差分定位原理出发,详细地解析了常规实时动态差分、常规实时动态分法任意基准站的工作原理,在此基础上,介绍了网络实时动态差分的工作原理,并比较、分析了常规与网络实时动态差分工作原理的异同之处与相互联系。从应用的角度考虑,给出了常规实时动态差分、常规实时动态差分任意基准站以及网络实时动态差分的作业流程,比较分析了各种方法的作业流程异同点,并通过实例数据说明了各种作业流程的正确性。
全球卫星导航系统;实时动态差分法;任意基准站;网络实时动态差分法
1 引言
全球卫星导航系统(global navigation satellite system,GNSS)为测绘行业带来了革命性的变化,尤其是我国北斗卫星导航系统(BeiDou navigation satellite system,BDS)的建成与运营,将进一步深化测绘行业的技术变革[1]。相对于传统的测图、放样、勘测方法,实时动态差分(real-time kinematic,RTK)具有效率高、劳动强度低、操作简单等优势,已广泛应用于许多cm级精度要求的工程中。
在最初的RTK应用中,必须有一台接收机安置在已知点上作为基准站,但在实际应用中,由于工程区域缺乏已知点或已知点上不便于设置基准站,通常采用任意点上设置基准站,然后通过点校正的方法配置坐标参数。把用户自己需要配置基准站的方法称为常规RTK技术。随着通信技术和常规RTK技术的进一步发展,从资源共享和拓展常规RTK的作业范围的角度出发,出现了网络RTK技术。网络RTK技术是基于连续运行参考站系统(continuous operational reference system,CORS)的网络实时动态定位系统,用户无需配置基准站[2]。
对于很多RTK使用者,尤其是初学者,还存在对常规RTK、常规RTK任意基准站法、网络RTK认识不清的问题,本文从工作原理、作业流程方面详细地解析、阐述和比较各种RTK,从原理上解答RTK使用者的疑惑,从应用角度帮助使用者会用各种RTK技术进行测量、放样、勘测等工作。
2 工作原理比较与分析
常规RTK和网络RTK的基本工作原理都是载波相位差分定位原理。在卫星导航定位中,由于星历误差、卫星钟差、电离层及对流层等误差的存在,导致单点绝对定位的精度较低。当两测站相距较近时(一般小于30 km),认为两测站所受到上述误差具有很强的时空相关性,通过求差的方法可消除或消弱相关的误差,从而得到两测站间高精度的基线向量,这就是载波相位差分定位的基本原理。
2.1 常规RTK工作原理
常规RTK的最初基本思想是:在基准站上安置一台GNSS接收机,对卫星进行连续观测,并通过无线电传输设备实时地将观测数据及基准站坐标信息传送给流动站;流动站一方面通过接收机接收GNSS卫星信号,同时还通过无线电接收设备接收基准站传送的观测数据,然后根据相对定位原理,实时地进行处理数据,并实时地以厘米级的精度给出流动站的三维坐标[2]。从常规RTK的工作原理可见,基准站一般要设置在坐标已知的点上,且对天观测条件较好[3]。如图1所示,图中Sj(j=1,2,3,…6)表示可观测卫星的编号,当用户流动站相对于基准站的基线向量lik求得,用户流动站的坐标就可表述为
(1)
式(1)中,[xkykzk]T为用户流动站的坐标;[xiyizi]T为基准站的坐标;[ΔxikΔyikΔzik]T为基准站至流动站的基线向量lik。

图1 常规RTK工作原理图
2.2 常规RTK任意基准站法工作原理解析
在测区缺少已知点或已知点上对天观测条件较差时,常常将基准站设在对天观测条件较好的任意点处。那么,常规RTK任意基准站法能否与上述传统的常规RTK一样满足用户所要求的高精度测量任务呢?不管何种RTK,首先其属于GNSS载波相位相对定位。通过GNSS载波相位相对定位,可得到两测站间高精度的基线向量,该基线向量类似于导线测量所得到的坐标增量。那么,在获得高精度的基线向量的基础上,用户只要给出测量基线中,某一基线的一个已知点坐标作为起算数据,在设置好坐标系转换参数后,就可得到其他流动站的坐标。如图2所示,图2中Sj(j=1,2,3,…6)表示可观测卫星的编号。
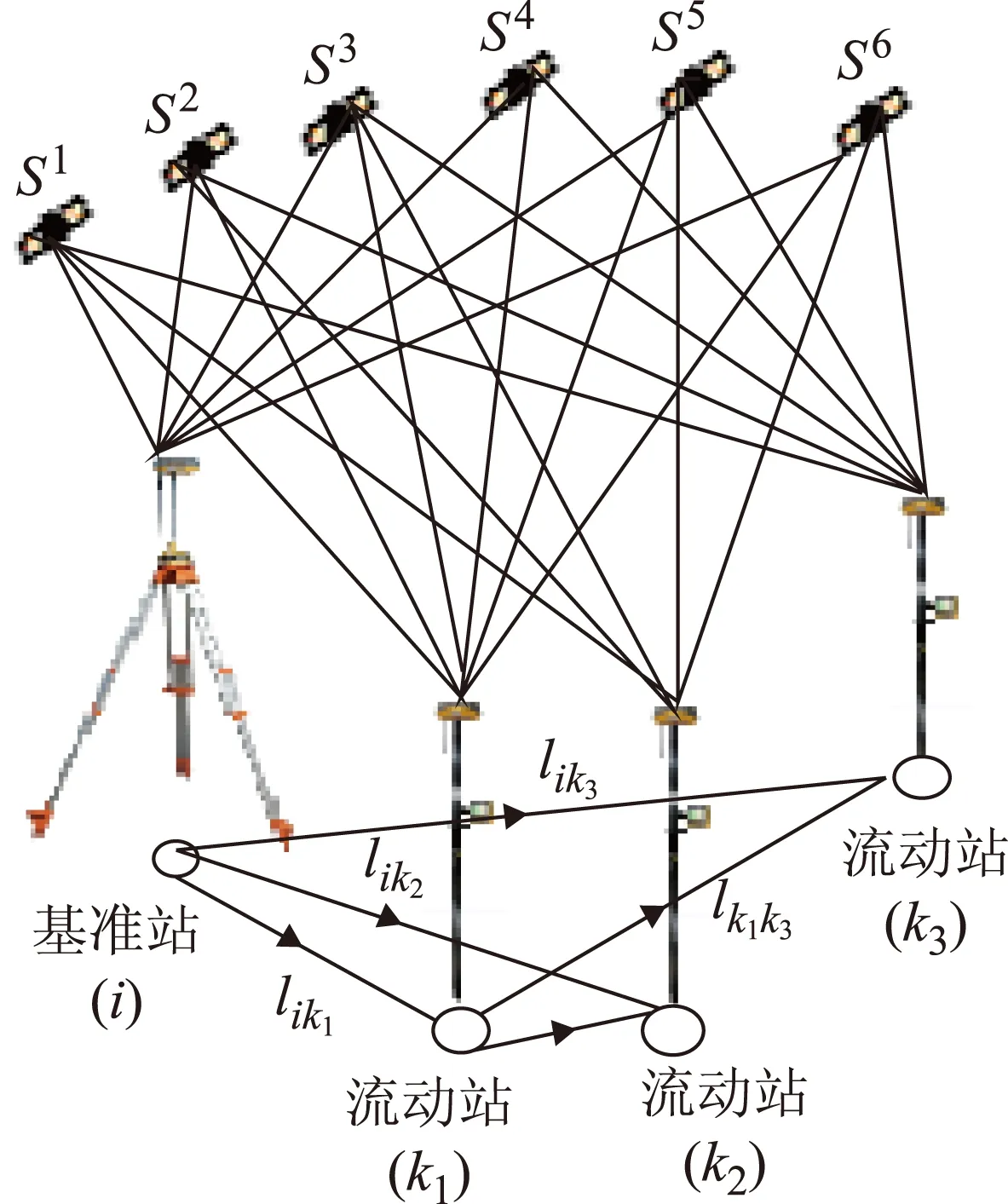
图2 常规RTK任意基准站法工作原理图
当基准站i向外播发接收的卫星观测数据,流动站k1、k2、k3接收后,通过载波相位求差模型,可获得高精度的基线向量lik1、lik2、lik3。此时,若用户坐标系内k1点的坐标已知,由空间几何向量关系可得
lk1k2=lik2-lik1
(2)
lk1k3=lik3-lik1
(3)
求解出基线向量lk1k2、lk1k3后,根据式(1)的方法,可求得k2、k3点的精确坐标。若有n个流动站,则可依次类推得到其相应点的精确坐标。
从以上的解析可见,常规RTK任意基准站法是常规RTK的推广,二者工作原理的本质是相同的。
2.3 网络RTK工作原理
网络RTK是在常规RTK的理论和应用基础上,以资源共享为宗旨,在一定的区域范围内根据需求建立若干个固定的CORS站,利用现代通信技术将这些参考站与数据中心组成网络,如图3所示,其中参考站负责GNSS数据采集,通信链路负责数据传输,数据中心则根据多个基准站的已知误差,用一定的算法来推算该区域内任何一处流动站的未知误差,然后在此基础上,建立高精度的双差解算模型,解算整周模糊度,得到基准站与用户流动站的高精度基线向量,类似于常规RTK基准站法,进一步得到用户流动站的高精度实时定位结果。

图3 网络RTK工作原理图
在处理星历误差、卫星钟差、电离层及对流层等误差的计算,以及建立高精度的载波相位双差解算模型中,当前网络RTK采取的具体技术主要有:虚拟参考站(virtual reference station,VRS)[4-5]、区域改正数(Flächen Korrektur Parameter,FKP)技术[6]、主辅站技术(master-auxiliary concept,MAC)[7-8]以及综合误差内插法(combined bias interpolation,CBI)[9-10]。
2.4 比较与分析
载波相位相对定位是常规RTK、常规RTK任意基准站法以及网络RTK的共同基本原理。从工作原理的具体技术方面比较,它们的区别主要有:(1)资源共享方面,网络RTK优于常规RTK。常规RTK作业中,每一单位用户需要自己配置基准站,而网络RTK用户只需处于网络覆盖范围即可,无需配置基准站;(2)多基准站网络RTK的作业范围较大。最初的网络RTK为单基准站法,除基准站的配置与否外,其差分定位原理与常规RTK任意基准站法相同,都是依据载波相位的原始观测值建立双差模型,通过求差的方式消除或消弱误差的影响,这就要求基准站与流动站必须相距较近,以保证各种误差的时空相关性;而多基准站网络RTK则根据网络内基准站的已知信息、基准站和流动站的观测数据,求解了网覆盖范围内的相关误差改正信息,在构建双差模型时,综合考虑了这些改正信息,保证了其定位精度,克服了常规RTK的定位精度随着流动站离基准站距离增加而降低的缺陷;(3)多基准站网络RTK的系统稳定性较好。现行的网络RTK系统一般有多个基准站,当一个或多个参考基准站出现故障时,利用剩余的参考基准站仍能正常工作,故系统的可靠性相对较高。
3 工作流程比较与分析
正确的仪器设置和作业流程是利用RTK进行作业的前提,以下首先介绍常规RTK、常规RTK任意基准站法以及网络RTK的作业流程,并对各种方法的作业流程进行比较分析。
3.1 常规RTK作业流程
利用常规RTK作业时,其工作流程是:(1)新建工程项目;(2)基准站设置。用电子手簿及RTK软件连接基准站,使得基准站的外挂/内置电台按照一定频道播发基准站观测数据。设置基准站坐标及仪器高,设置坐标转换参数(如7参数、投影参数等);(3)连接用户流动站,设置流动站仪器高、差分数据格式等,当RTK软件处于测量状态时,其解显示为固定即可,在已知点上进行检核;(4)当检核结果符合厘米级精度后,开始碎部点采集、放样、勘测等测量工作。
3.2 常规RTK任意基准站作业流程
利用任意基准站RTK作业时,其工作流程大致为:(1)新建工程项目;(2)基准站设置。用电子手簿及RTK软件连接基准站,使得基准站的外挂/内置电台按照一定频道播发基准站观测数据;(3)连接用户流动站,设置流动站仪器高、差分数据格式等,当RTK软件处于测量状态时,其解显示为固定即可进入下一步;(4)点校正法配置坐标系统。在2~3个已知点上进行坐标采集,然后调用参数设置的“坐标系统”菜单项,利用“平面+高程拟合”或“七参数”菜单功能,进行已知点两套坐标配准,并进行坐标转换参数计算;(5)到其他已知点进行检核,如符合厘米级测量精度,则可开始碎部点采集、放样、勘测等测量工作。
3.3 网络RTK作业流程
利用网络RTK作业时,其工作流程大致为:(1)新建工程项目;(2)流动站设置。移动站使用内置网络功能,数据链选择内置网络,内置网络的类型有GPRS、CDMA、GSM,可通过点击右端网络模式选择其中的一种。如图4,给出了中海达网络RTK的流动站网络设置示意。
当流动站的网络连接设置好后,当RTK软件处于测量状态时,其解显示为固定即可进入下一步;(3)点校正法配置坐标系统。在2~3个已知点上进行坐标采集,然后调用参数设置的“坐标系统”菜单项,利用“平面+高程拟合”或“七参数”菜单功能,进行已知点两套坐标配准,并进行坐标转换参数计算;(4)到其他已知点进行检核,如符合厘米级测量精度,则可开始碎部点采集、放样、勘测等测量工作。

图4 网络RTK流动站网络设置
3.4 比较与分析
从上述的工作流程可见,常规RTK是需要设置基准站的测站坐标和仪器高信息,通过设置7参数和投影参数的方法实现坐标成果的转换;常规RTK任意基准站法不需要设置基准站的测站坐标和仪器高信息,通过点校正法配置坐标系统;网络RTK不需要另设基准站,通过通信网络,直接接收CORS站的观测数据和差分信息,这些功能在流动站的设置中完成。其坐标系统的配置与常规RTK任意基准站法相同。
为了验证上述方法作业流程的正确性,以某校的实习基地为实验场地,以中海达GPS V30 RTK为实验仪器设备,分别以常规RTK、常规RTK任意基准站法和网络RTK进行了实验,实验数据列于表1,因为RTK测量可达厘米级,故只给出小数点后面的部分。

表1 常规RTK、常规RTK任意基准站及网络RTK测量结果
从表1的结果可以看出,相对于已知坐标,常规RTK、常规RTK任意基准站法和网络RTK都可达到厘米级的测量结果。说明上述各作业流程都是正确的。
4 结束语
文中针对RTK技术的理论和应用问题,详细地解析了常规RTK、常规RTK任意基准站法及网络RTK技术的工作原理,并对其相应的作业流程进行了详细的阐述和分析比较。对于RTK的使用者,尤其是初学者,这些研究成果可帮助其理解RTK、使用RTK。
随着GNSS技术的发展,尤其是我国北斗卫星导航系统的建设与运行,我国测绘行业将面临重大的变革,懂得GNSS定位原理、会用GNSS技术进行测量工作将是大势所趋。
[1] 李克昭,韩梦泽,孟福军.北斗系统的特色、机遇与挑战[J].导航定位学报,2014,2(2):21-25.
[2] 李克昭,杨力,柴霖,等.GNSS定位原理[M].北京:煤炭工业出版社,2014:200-220.
[3] 张勤,李家权.GPS测量原理及应用[M].北京:科学出版社,2005,134-136.
[4] CRUDDACE P,WILSON I,GREAVES M,et al.The long Road to Establishing a National Network RTK Solution[EB/OL].[2014-05-12].http://www.geopp.de/pdf/OSUK-FIG2002.pdf.
[5] 史小雨,鲍志雄,潘国富.基于虚拟参考站技术的组合差分信息生成研究与实现[J].导航定位学报,2014,2(2):102-105.
[6] 李健,吕志平,乔书波.连续运行参考站网的演化与发展趋势[J].测绘科学,2008,33(S1):44-46.
[7] EI-MOWAFY A.Analysis of the Design Parameters of Multi-reference Station RTK GPS Networks[J].Journal of Satellite and Land Information Science (SaLIS),2005,65(1):17-26.
[8] 吴星华.利用徕卡主辅站技术建立重庆市GNSS综合服务系统[J].测绘通报,2007(3):74-75.
[9] 唐卫明,刘经南,刘晖,等.一种GNSS网络RTK改进的综合误差内插方法[J].武汉大学学报:信息科学版,2007,32(12):1156-1158.
[10]马洪滨,孙军,周海壮,等.鞍山市连续运行参考站系统建设与定位精度分析[J].导航定位学报,2013,1(1):89-95.
Comparison and Analysis of Standard RTK & Network RTK Methods
WEI Yan-zhong
(Construction & Installation Engineering Co.Ltd of CR11BG,Xiangyang 441057,China)
Along with the rapid development of global navigation satellite system (GNSS) technologies,real time kinematic (RTK) is showing its incomparable advantages in the centimeter level requirements projects,such as surveying and setting-out.In this paper,according to the theories of GNSS carrier phase differential positioning,the operational principles of standard RTK,and arbitrary base station RTK are analyzed in detail.On the basis of these,the operational principle of network RTK is introduced.And the similarities & differences,and the intercommunications between standard RTK and network RTK are compared and analyzed.From the application point of view,the operational steps of standard RTK,arbitrary base station RTK and network RTK are given here.And the similarities & differences of their operational steps are compared and analyzed.Moreover,the validities of their operational steps are proved by the surveying data.For the standard RTK & network RTK users,the results of this paper have a certain reference value.
global navigation satellite system (GNSS);real time kinematic (RTK);arbitrary base station;network RTK
2014-07-21
韦延忠(1962),男,湖北襄阳人、工程师,主要从事卫星导航定位的应用研究。
P228
A
2095-4999(2015)-01-0015-04