基于干涉仪的扩频雷达多通道时分复用技术*
2015-05-05赵赛果姚玉维孙武蒋清富
赵赛果,姚玉维,孙武,蒋清富
(北京遥感设备研究所,北京 100854)

基于干涉仪的扩频雷达多通道时分复用技术*
赵赛果,姚玉维,孙武,蒋清富
(北京遥感设备研究所,北京 100854)
在基于多基线相位干涉仪的扩频测向雷达系统中,多通道间的增益与相位差异以及不同环境下群时延变化特性差异一直是测量误差的主要来源。多通道时分复用技术通过最大限度共用接收通道降低通道差异导致的测量误差;同时,合理分配各通道时隙,采用多时隙信号相干积累的办法兼顾动态跟踪能力和测量精度。相比传统的多通道接收系统,该方法提高了测量精度,降低了硬件复杂度与系统成本,体积与功耗均进一步降低。
扩频雷达;时分复用;相位干涉仪
0 引言
干涉仪测向雷达采用多辐射单元天线阵列,通过计算各辐射单元的来波相位求解目标在雷达视场内的角度信息。多基线相位干涉仪测向算法采用长基线天线辐射单元提高测向精度,同时利用短基线解决相位模糊问题,因其测量精度高,不需要伺服机构,在现代测量雷达系统中得到广泛应用[1-3]。
这种多通道测向雷达系统,为提高接收机的检测灵敏度与动态范围,接收通道多采用超外差接收和多级信号预选滤波器,复杂的接收增加了各接收通道间固有的相位差异和因温度等原理导致的相位差异[4],未校准的通道相位不一致性会导致测量精度下降甚至错误的测量结果,而高精度的校准实现困难,同时会增加系统的复杂度。有源校准的精度较高,通过增加校准信号源和开关矩阵,对各通道进行同源相位延迟标校,但是这种方法无法消除因温度等环境因素导致的通道相位误差[5]。
本文以某 “直接序列扩频测向雷达”研制项目为例,利用多基线干涉仪无模糊高精度测向的优势,创新性地提出了多通道时分复用技术,对通道进行时隙划分,干涉仪各天线接收通道分时复用同一个硬件接收通道,有针对性的解决了由通道不一致性导致的测量精度问题。
1 时分复用接收系统设计
“直接序列扩频测向雷达”采用周期为1 ms的伪随机码直接调制的连续波信号,测向接收系统采用9馈源天线阵列。系统共有9路接收通道,其中主接收通道完成解调解扩,4路俯仰测角通道,4路方位测角通道。
时分复用接收系统如图1所示,主要的功能电路包括:接收天线、俯仰单刀四掷开关、方位单刀四掷开关、俯仰接收通道、方位接收通道、主接收通道、信号处理机。
来波信号由接收天线同时接收并分别传输给俯仰单刀四掷开关、方位单刀四掷开关和主接收通道;主接收通道对接收信号进行低噪放、下变频和AGC放大,信号处理机完成伪码的捕获和载波跟踪,提取出测向通道所需的载波频率与相位信息。
俯仰单刀四掷开关(或方位单刀四掷开关)在信号处理的控制下,同一段时间(称为一个时隙)仅选通一路,其他三路关闭,并将当前导通的通道信号传输给俯仰接收通道(或方位接收通道),经过接收通道低噪声放大、下变频和AGC放大,向信号处理机输出功率稳定的中频信号,信号处理机对俯仰接收通道(或方位接收通道)输出的中频信号利用主接收通道提取出的载波频率和相位信息进行快速锁定跟踪,得到载波相位。信号处理机通过统计各时隙的来波相位计算目标飞行器在雷达视场内的俯仰角与方位角。
时序关系如图2所示。
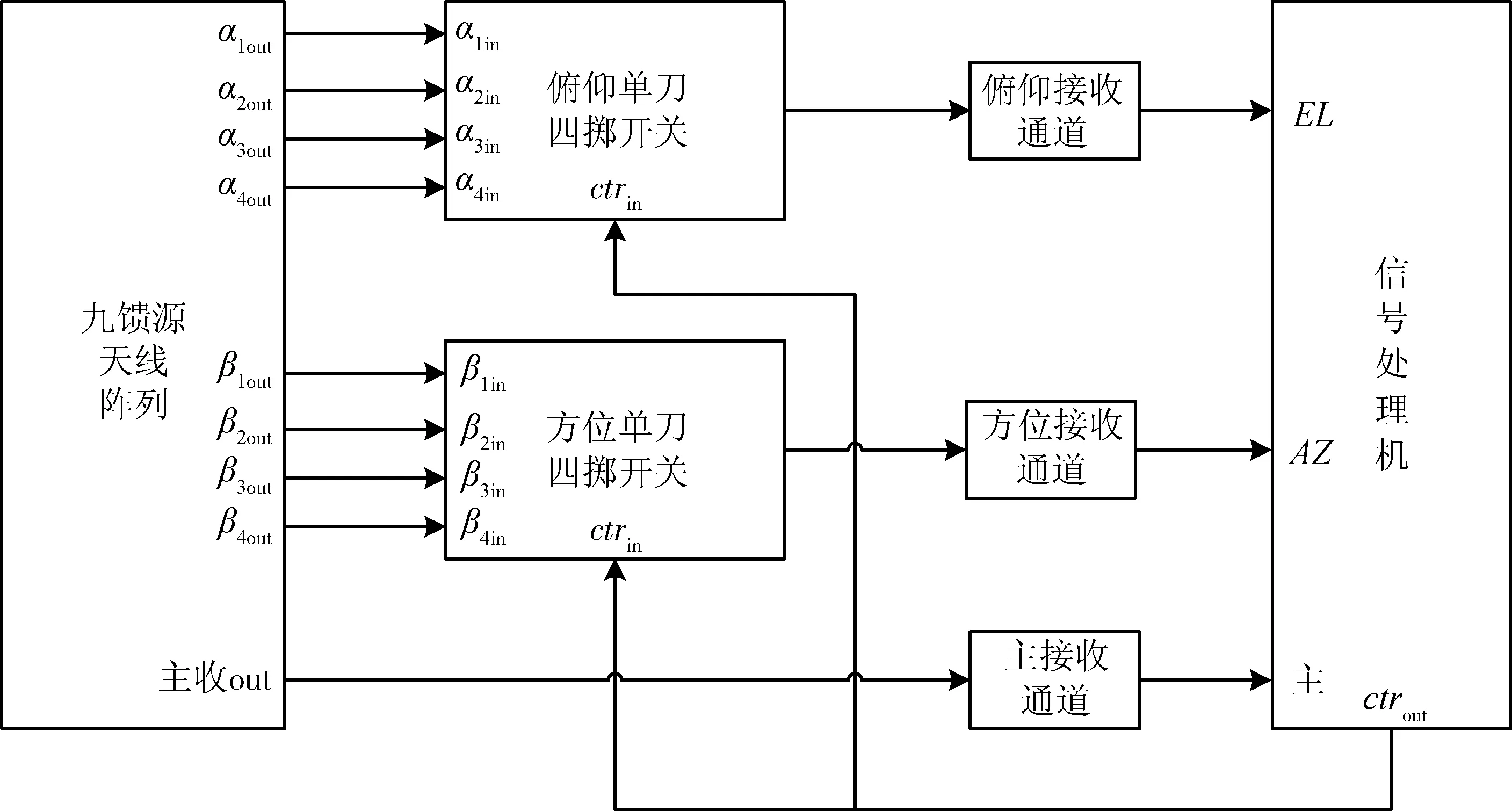
图1 直接序列扩频测向雷达时分复用接收系统Fig.1 Time domain multiplexing receiver of RVD radar
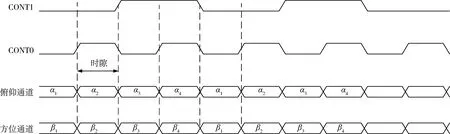
图2 接收通道时分复用时序Fig.2 Flow chart of time-domain multiplexing receiver
2 信号处理算法
2.1 信号结构
“直接序列扩频测向雷达”采用伪码连续波信号,接收通道对接收信号进行选通、放大、下变频,信号处理机对模拟信号进行采样并量化为数字信号,其可用数学表达式表示为
(1)
式中:tk=kts,ts为采样间隔;Ps为信号功率;PN(tk+τ)为带有延时量τ的伪码,伪码周期1 ms;ωI为中频频率;ωd为载波多普勒频率;n(tk)为噪声。
2.2 主通道捕获跟踪算法
式(1)中,未知量主要有伪码延迟τ与载波多普勒频率ωd,为了求解这2个未知量,主通道捕获算法利用伪随机序列自相关函数的性质,当本地伪码与接收伪码对齐时,能获得最大的自相关值[6-7]。
将1 ms接收数据分成P段,每段L点数据,经过数字正交下变频和L点部分相关,得到I,Q2路信号为
n=0,1,…,P-1,
(2)
n=0,1,…,P-1.
(3)

对z(n)=I(n)+jQ(n)进行N(N≥P)点的FFT运算:
(4)
(5)
式中:kZmax为FFT峰值对应的k的取值。
再生伪码发生器以捕获预测的伪码相位为基础进行伪码相位的跟踪,分别产生超前1/2码片、即时码片和滞后1/2码片三路伪码序列。采用三路积分清除结果进行伪码误差鉴别。采用归一化的点积功率鉴别器进行伪码相位鉴别,鉴别的结果经过环路滤波器输出后调整再生伪码发生器,完成对伪码相位的跟踪[10]。
主通道完成伪码捕获后,产生的再生伪码提供给主接收通道、俯仰接收通道、方位接收通道完成解调解扩。
主接收通道除完成伪码的捕获跟踪外,还利用锁频环完成载波频率跟踪,锁频环采用点积、叉积四象限反正切算法来实现频率鉴别,合理设置环路滤波器和锁定判决门限,在锁频环稳定跟踪情况下,频率估计误差小于10 Hz。
2.3 通道相位跟踪算法
为兼顾跟踪能力和跟踪精度,跟踪算法采用锁频环和锁相环串联,由锁频环消除大部分动态,锁相环实现精密载波相位跟踪。锁相环相位鉴别器采用四象限反正切鉴相方法,鉴别结果送入环路滤波器,滤波后的误差信号不断调整锁相环载波NCO,保持载波相位的精确跟踪。载波相位提取的原理如图4所示。
中频信号经载波剥离、再生伪码解扩后与锁相环NCO进行联合处理。
(6)
(7)
式中:A为幅值;R[τe(k)]为码相位(延时)估计偏差引入项;sinc[Δωd(k)·N/2]为多普勒估计残差引入项。经过上述的相位旋转运算后,采用四象限反正切算法进行相位鉴别,通过环路滤波器、锁相环NCO共同构成载波锁相环提取各通道载波相位[11-12]。
2.4 通道时分复用参数设计
“直接序列扩频测向雷达”微波雷达采用通道时分复用技术后,接收通道由9个合并为3个,4个俯仰测角接收通道复用一个硬件通道,4个方位测角接收通道复用一个硬件通道,每个通道分时占用接收通道时隙,当测量目标相比测量雷达有大动态运动时,各通道采样时间的不一致和锁相环载波NCO更新时间的不一致会导致通道测向误差。为减小这种效应,通道时隙应该设计得尽量小。
另一方面,微波开关的切换并不是理想的,存在开关延迟和信号建立时间。这段时间内,信号处理机采集的信号样本是不可用的,常见的微波开关的转换时间大约在100~150 ns,记为Tn,假设系统设计的时隙为Ts,那么由转换时间造成的信号功率损失为
(8)
为了避免造成大的信号功率损失, 设计时隙Ts应远大于Tn。
时隙的设计应兼顾上述2种效应,结合“直接序列扩频测向雷达”的应用情况, “直接序列扩频测向雷达”的时隙设计为2.5 μs,对应微波开关的切换频率为400 kHz。
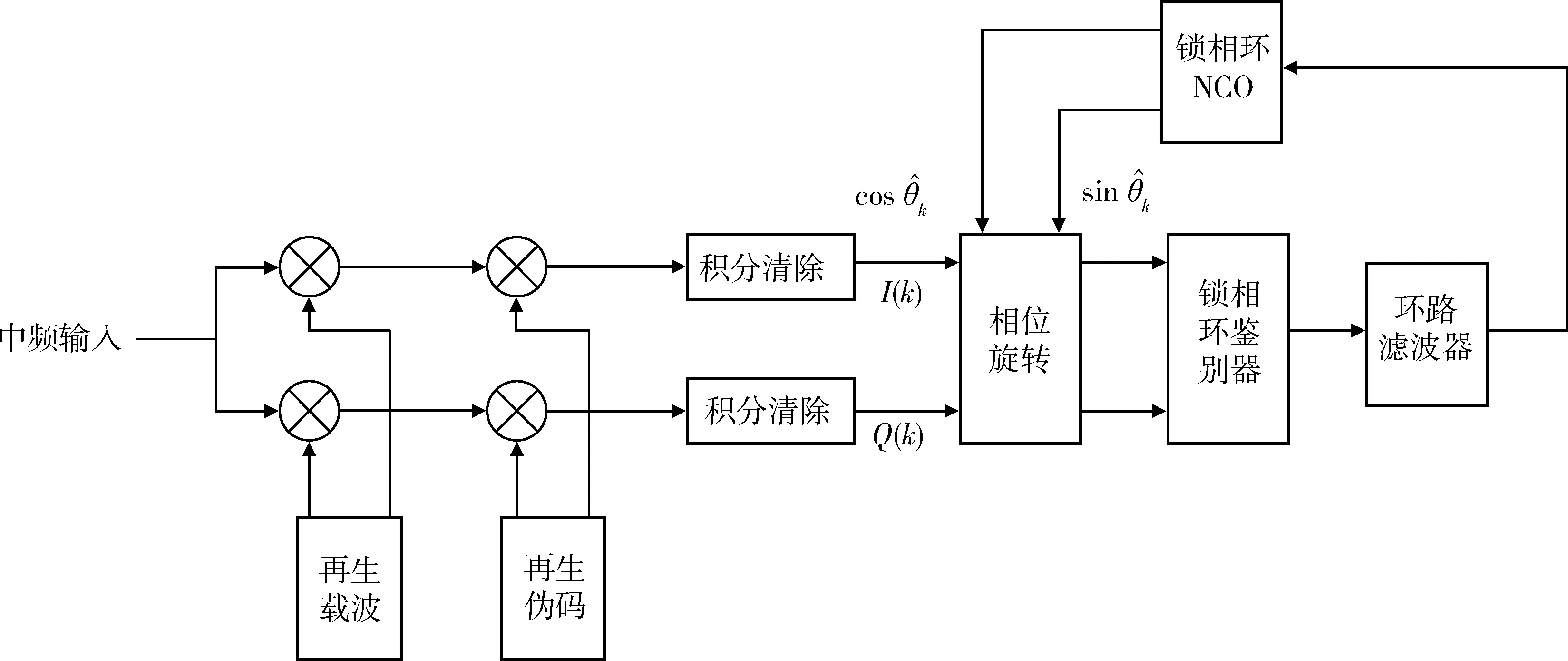
图3 载波相位跟踪环路框图Fig.3 Carrier phase tracking loop block diagram
与主接收通道跟踪环不同的是,各测角接收通道的跟踪只利用了1/4的数据,这种部分相关算法会导致信噪比损失。为进一步提高跟踪灵敏和测角精度,测角跟踪环路的积分清除时间并未设计成伪随机码周期1 ms,而是通过多周期相干积累进一步提高信噪比。这种处理方式也成功的应用于“某直接序列扩频测向雷达”,具体的做法是:
(1) 每8 ms进行一次积分清除,每通道提供约2 ms的有效数据;
(2) 每8 ms更新一次载波锁相环NCO。
3 性能仿真
结合“直接序列扩频测向雷达”应用情况,设置如下仿真条件:信噪比为-20 dB、多普勒残差为10 Hz,设置合理的锁相环路带宽。分别对采用独立通道、通道分时复用2种工作模式进行仿真。独立通道仿真时,积分清除时间按照伪码周期1 ms进行;通道分时复用时,积分清除时间分2种方式进行仿真,分别为1 ms积分清除时间和8 ms积分清楚时间。
仿真结果如图4~6所示。
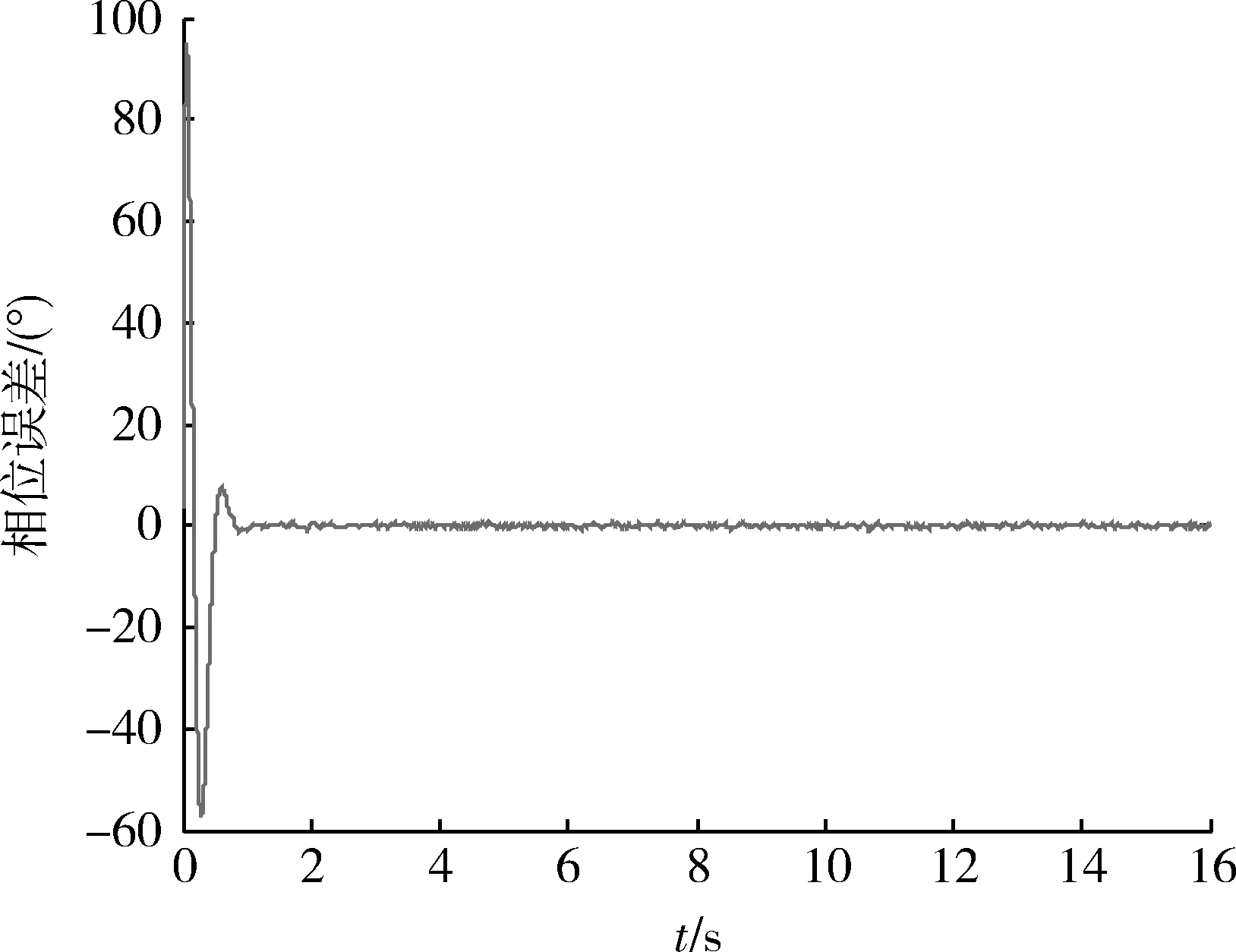
图4 独立通道1 ms积分清除相位误差Fig.4 Phase error of receiving used 1 ms integrate/dump filter with independent channel

图5 通道分时复用1 ms积分清除相位误差Fig.5 Phase error of receiving used 1ms integrate/dump filter with time-domain multiplexing channel

图6 通道分时复用8 ms积分清除相位误差Fig.6 Phase error of receiving used 8ms integrate/dump filter with time-domain multiplexing channel
图中3种设计均能正常进行锁定跟踪,前2种方式载波锁相环NCO更新时间相同,因此具有相同的锁定时间,通道分时复用8 ms积分清除方式因为载波锁相环NCO更新时间不同,对跟踪速度造成影响。仿真表明,锁定时间与积分清除时间(或载波锁相环NCO更新时间)成正比。
对3种方式在跟踪状态下的相位误差进行仿真并统计相位误差的标准差,统计结果如表1所示。

表1 相位误差标准差统计Table 1 Phase error standard deviation statistics SNR
表1表明,在通道分时复用工作方式时,相位误差相对较大,这将对直接序列扩频测向雷达的测角误差带来不良影响。“直接序列扩频测向雷达”采用的多周期相干积累的方法减弱了这种不良影响。
4 结束语
多通道分时复用技术解决了多基线相位干涉仪测向雷达各接收通道间的增益与相位差异以及不同环境下群时延变化特性差异导致的测量误差大的问题,同时,较大程度上减小了系统的体积、重量和功耗。仿真和实践表明,分时复用带来的跟踪时间延长等问题均在“某直接序列扩频测向雷达”技术指标可容许的范围内。
多通道分时复用技术适用于宽带干涉仪测量雷达,可应用于民用或航天雷达系统中,对其他多通道接收机的系统设计也具有一定的借鉴意义。
[1] 周亚强,皇甫堪.噪扰条件下数字式多基线相位干涉仪解模糊问题[J].通信学报,2005,26(8):16-19. ZHOU Ya-qiang,HUANG-FU Kan. Solving Ambiguity Problem of Digitized Multi-Baseline Interferometer Under Noisy Circumstance[J].Journal on Communications,2005,26(8):16-19.
[2] ERNEST J.Ambiguity Resolution in Interferometer[J]. IEEE Trans.AES,1981,l17(6): 766-780.
[3] MALLOY N J.Analysis and Synthesis of General Planar Interferometer Arrays[C]∥IEEE ICASSP,1983:352-355.
[4] In-BokKong,Kim Seung-Woo.Portable Inspection of Precision Surfaces by Phase-Shifting Interferometry with Automatic Suppression of Phase-Shift Errors[J].Optical Engineering,1995,34(5):1400-1404.
[5] 张文旭,司锡才,蒋伊琳.相位干涉仪测向系统相位误差研究[J].系统工程与电子技术,2006,28(11):1631-1632. ZHANG Wen-xu,SI Xi-cai,JIANG Yi-lin.Research on Phase Error in the System of Direction Finding by Phase Interferometer[J].Systems Engineering and Electronics,2006,28(11):1631-1632.
[6] 刘娣,薄煜明,吴盘龙.基于伪码自相关特性与三次样条插值的GPS信号快速捕获算法[J].信息与控制,2011.40(2):187-189. LIU Di,BO Yu-ming,WU Pan-long.GPS Signal Fast Acquisition Algorithm Based on PN Code Auto-Correlation Property and Cubic-Spline Interpolation Method,2011,40(2):187-189.
[7] KAPLAN E D.Understanding GPS:Principles and Applications[M].Norwood,MA,USA:Artech House,1996:142-150.
[8] VAN Nee D J R,COENEN A J R M.New Fast GPS Acquisition Technique Using FET [J].Electronic Letters(S0013-5194),1991,27(2):158-160.
[9] 刘晓莉,李云荣.一种基于FFT的高动态GPS 信号快速捕获方法[J].系统仿真学报,2007,19(10):2151-2155. LIU Xiao-li, LI Yun-rong. Fast Acquisition Based on FFT for High Dynamic GPS Signals[J]. Journal of System Simulation,2007,19(10):2151-2155.
[10] Ilir F Progri,Clifford W Kelley,GAO Guo-jiang,et al.Discrete vs.Continuous Carrier Tracking Loop Theory,Implementation,and Testing with Large BnT[C]∥20th Intemational Technical Meeting of the Satellite Division of the Institute of Navigation.Fort Worth,Texas USA:ION,2007:2584-2610.
[11] 姜毅,张淑芳,胡青,等.改进的基于四象限反正切函数的鉴别器算法[J].吉林大学学报,2011,41(3):849-854. JIANG Yi,ZHANG Shu-fang,HU Qing,et al.Improved Discriminator Algorithm Based on Four-Quadrant Arctangent Function[J].Journal of Jinlin University, 2011,41(3):849-854.
[12] 唐小妹,黄仰博,王飞雪.导航接收机中基于反正切鉴别器载波环路的分析及优化设计[J].电子与信息学报,2010,32(7):1747-1751. TANG Xiao-mei,HUANG Yang-bo,WANG Fei-xue.Performance and Design of Carrier Tracking Loop Based on Atan Detector in GNSS Receiver[J].Journal of Electromics & Information Technology, 2010,32(7):1747-1751.
Time-Domain Multiplexing of Spread Spectrum Radar Based on Phase Interferometer
ZHAO Sai-guo,YAO Yu-wei,SUN Wu,JIANG Qing-fu
(Beijing Institute of Remote Sensing Equipment,Beijing 100854,China)
In spread spectrum direction-finding radar receiving system based on multi-baseline phase interferometer, the main sources of measuring error include the amplitude unbalance, phase unbalance between multi-channels and the group delay characteristics under different environments. The multi-channel time-division multiplexing reduces measuring error by maximum shared receiving channels. In addition, rational distribution of the channel time slot and coherent integration can compromise the dynamic tracking performance and measuring precision. Comparing with traditional multi-channel receiving system, this method not only improves the measuring precision, but also reduces the hardware complexity and the system cost. Furthermore, the system volume and power are decreased greatly.
spread spectrum radar; time-division multiplexing; phase interferometer
2014-11-13;
2014-12-09
赵赛果(1982-),男,湖南宁乡人。高工,硕士,主要从事微波雷达系统研究工作。
通信地址:100854 北京142信箱205分箱十一室 E-mail:zhaosaiguo@hotmail.com
10.3969/j.issn.1009-086x.2015.04.013
TN957
A
1009-086X(2015)-04-0074-06
