双闭环直流调速系统的设计与仿真分析
2015-04-29施鹏
施鹏
摘要:本文简要介绍了双闭环直流调速系统的组成与基本工作原理,并对双闭环转速、直流调速系统设计展开分析论述,阐明了双闭环直流调速系统的模型仿真。
关键词:双闭环;直流调速系统;仿真
直流电动机因易于控制,起、制动、运行方便等特征在生活中的应用范围较广。近年来,经济的增长推动了该调速系统在我国经济市场中的进一步发展,很多高性能高调速设备均需使用该系统(包括直流电力推进、海洋钻机、金属切割机床、纺织、造纸、轧钢、高层电梯、矿山采掘等),设备运行时,对调速系统的性能要求均较高,需弄清双闭环直流调速系统的基本工作原理,并对其进行仿真分析,使其更好为现代经济的发展服务。
1.双闭环直流调速系统组成与工作原理
双闭环直流调速系统中有两个调节器,即电流ACR调节器与转速ASR调节器,两种调节器可对系统的电流与设备转速造成影响,若二者串联,且均带输出限幅电路,限幅值依次可为Usim与Ucm。因调速系统的关键性被控量为转速,因而需将转速负反馈组成的环视作外环,这可让电动机转速无误的跟随给定电压,再将电流负反馈生成的环视作内环,以让设备在最大电流节约下,使得整个转速过渡过程得到最佳控制。整个双闭环直流调速系统工作原理图如下所示:
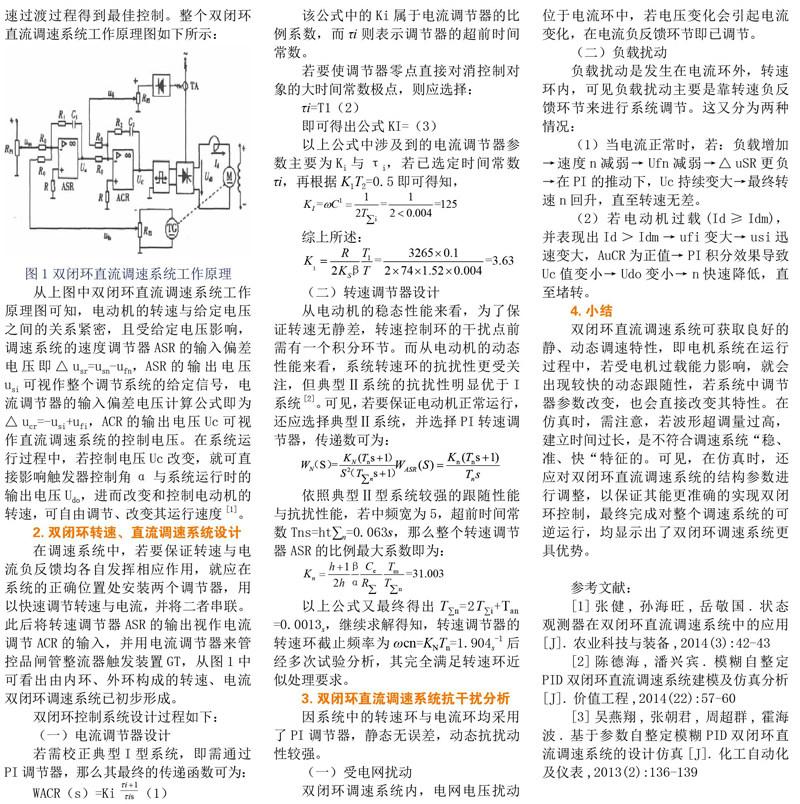
图1双闭环直流调速系统工作原理
从上图中双闭环直流调速系统工作原理图可知,电动机的转速与给定电压之间的关系紧密,且受给定电压影响,调速系统的速度调节器ASR的输入偏差电压即△usr=usn-ufn,ASR的输出电压usi可视作整个调节系统的给定信号,电流调节器的输入偏差电压计算公式即为△ucr=-usi+ufi,ACR的输出电压Uc可视作直流调速系统的控制电压。在系统运行过程中,若控制电压Uc改变,就可直接影响触发器控制角α与系统运行时的输出电压Udo,进而改变和控制电动机的转速,可自由调节、改变其运行速度[1]。
2.双闭环转速、直流调速系统设计
在调速系统中,若要保证转速与电流负反馈均各自发挥相应作用,就应在系统的正确位置处安装两个调节器,用以快速调节转速与电流,并将二者串联。此后将转速调节器ASR的输出视作电流调节ACR的输入,并用电流调节器来管控品闸管整流器触发装置GT,从图1中可看出由内环、外环构成的转速、电流双闭环调速系统已初步形成。
双闭环控制系统设计过程如下:
(一)电流调节器设计
若需校正典型I型系统,即需通过PI调节器,那么其最终的传递函数可为:
(二)转速调节器设计
从电动机的稳态性能来看,为了保证转速无静差,转速控制环的干扰点前需有一个积分环节。而从电动机的动态性能来看,系统转速环的抗扰性更受关注,但典型Ⅱ系统的抗扰性明显优于I系统[2]。可见,若要保证电动机正常运行,还应选择典型Ⅱ系统,并选择PI转速调节器,传递数可为:
3.双闭环直流调速系统抗干扰分析
因系统中的转速环与电流环均采用了PI调节器,静态无误差,动态抗扰动性较强。
(一)受电网扰动
双闭环调速系统内,电网电压扰动位于电流环中,若电压变化会引起电流变化,在电流负反馈环节即已调节。
(二)负载扰动
负载扰动是发生在电流环外,转速环内,可见负载扰动主要是靠转速负反馈环节来进行系统调节。这又分为两种情况:
(1)当电流正常时,若:负载增加→速度n减弱→Ufn减弱→△uSR更负→在PI的推动下,Uc持续变大→最终转速n回升,直至转速无差。
(2)若电动机过载(Id≥Idm),并表现出Id>Idm→ufi变大→usi迅速变大,AuCR为正值→PI积分效果导致Uc值变小→Udo变小→n快速降低,直至堵转。
4.小结
双闭环直流调速系统可获取良好的静、动态调速特性,即电机系统在运行过程中,若受电机过载能力影响,就会出现较快的动态跟随性,若系统中调节器参数改变,也会直接改变其特性。在仿真时,需注意,若波形超调量过高,建立时间过长,是不符合调速系统“稳、准、快“特征的。可见,在仿真时,还应对双闭环直流调速系统的结构参数进行调整,以保证其能更准确的实现双闭环控制,最终完成对整个调速系统的可逆运行,均显示出了双闭环调速系统更具优势。
参考文献:
[1]张健,孙海旺,岳敬国.状态观测器在双闭环直流调速系统中的应用[J].农业科技与装备,2014(3):42-43
[2]陈德海,潘兴宾.模糊自整定PID双闭环直流调速系统建模及仿真分析[J].价值工程,2014(22):57-60
[3]吴燕翔,张朝君,周超群,霍海波.基于参数自整定模糊PID双闭环直流调速系统的设计仿真[J].化工自动化及仪表,2013(2):136-139
