基于六杆机构的机械手运动分析与优化
2015-04-25陈功顾寄南郑立斌王红梅潘岳龙
陈功,顾寄南,郑立斌,王红梅,潘岳龙
(1. 江苏大学制造业信息化研究中心,江苏镇江212013;2. 景德镇学院科研处,江西景德镇333000)
0 前言
上下料机器人在工业生产中一般是为数控机床服务的。数控机床的加工时间包括切削时间和辅助时间。当上下料机器人的上料精度达到一定的要求,就可以缩减数控机床的对刀时间,从而减少了切削时间。因此,上下料机器人就是通过减少生产辅助时间和缩短对刀时间来达到提高数控机床加工效率的目的。文中利用解析法和MATLAB 软件对基于六杆机构的机械手进行数学建模和运动分析,得出了一些结论;同时,在运动分析的基础上对机械手进行优化,提高其运行的平稳性。文中分析的六杆组合机构如图1 所示。
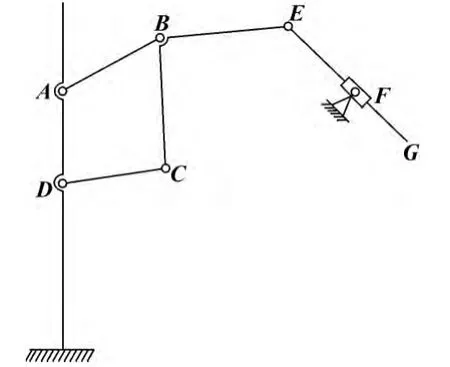
图1 六杆组合机构示意图
1 数学模型的建立
为了得到机构在整个运动循环中的运动特性,常常使用解析法来计算,借助于计算机便可以精确地得到机构运动的速度曲线图和加速度曲线图,便于机构的优化设计。通过计算机还能得到机构的运动轨迹点,使机构运动可视化。使用解析法建立点G 的速度和加速度的数学模型,然后利用MATLAB 软件绘制出速度和加速度曲线图。
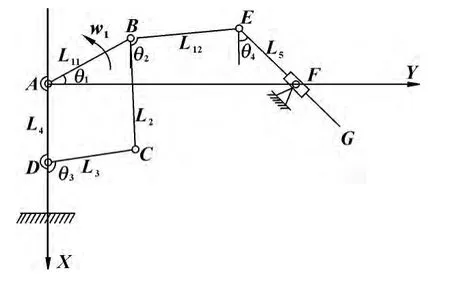
图2 机构的运动参数
如图2 所示,以点A 为坐标原点,建立平面直角坐标系,设L11、L2、L3、L4、L12、L5分别为杆AB、BC、CD、AD、BE、EF 的长度,LAF为点A 到点F 的垂直距离,θ1、θ2、θ3、θ4分别为杆AB、BC、CD、EF 的角位移,w1、w2、w3、w4分别为杆AB、BC、CD、EF 的角速度,a2、a3、a4分别为杆BC、CD、EF 的角加速度,vg、ag分别为G 点的速度和加速度。
经过计算后,得出该机构的速度和加速度的数学模型为:

2 速度和加速度曲线的绘制
由于以上得出的速度和加速度方程过于复杂,故采取MATLAB 软件绘制速度和加速度曲线图。MATLAB 是美国MathWorks 公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,具有强大的绘图能力。
将上述自变量、变量、常量的表达式输入MATLAB里,根据四杆机构运动杆长条件,设L11=100 mm,L2=180 mm,L3=140 mm,L4=150 mm,L12=150 mm,L5=150 mm,LAF=300 mm,w1=20 rad/s,计算出各个变量的数据后,利用plot 函数绘制速度和加速度随着曲柄转角θ1变化而变化的曲线如图3、4 所示。

图3 速度曲线图

图4 加速度曲线图
3 六杆机构机械手的初步优化和轨迹仿真
由图3 的速度曲线的分析可知,上文中所假定的杆长数据并不是很理想,应该对杆长数据进行优化,使机械手的末点位置应平稳的运动以防对工件造成损伤。在对x 轴方向的速度曲线进行进一步分析发现,杆长l22对末点速度的影响较大。因此对杆长进行多次赋值,得出运行速度较为平稳的曲线图,如图5 所示为点G 在杆l22的不同长度下的速度曲线。

图5 杆l22在不同长度下的速度曲线
因为机械手的最终目的是为了抓取零件,能不能顺利地进行抓取,必须要判断零件的位置是否在机械手的工作空间范围内,如果在机械手的工作空间范围内,则可以直接抓取,如果不在工作范围内,则可以从已知的位置分别减去机械手所能达到的最大位移,得到机械手移动载体的位移,移动载体再转化为物体在机械手工作空间范围内的情况。MATLAB 有强大的计算和绘图功能,利用空间解析法对上下料机械手部分的工作空间进行仿真。图6 为由模拟得出的点G 的位移的运动轨迹,满足上下料机械手的运动轨迹的要求。

图6 点G 的运动轨迹
4 结论
设计了一种基于六杆组合机构的上下料机械手,该机构运行稳定,结构简单,能满足上下料的基本要求。通过推导六杆机构的数学模型,并对此模型利用数学软件MATLAB 绘制出六杆机构的速度和加速度曲线图,提供了针对末点速度的杆长优化方法,简化了复杂机构的运动分析,并做出了机械手末点位置的工作空间,为该机构的后续的轨迹规划、运动学仿真、力学分析提供了基础。还可深入研究建立机械手动力学模型,用神经网络进行动力学解耦、结合机械手控制程序进行误差分析等问题。
[1]邹慧君.机械原理[M].北京:高等教育出版社,2006.
[2]余跃庆.高等机构学[M].北京:北京理工大学出版社,2006.
[3]熊有伦.机器人学[M].北京:机械工业出版社,1993.
[4]陈艳.面向数控机床群的上下料机器人设计与控制研究[D].镇江:江苏大学,2013.
[5]习小英.双四杆机构的运动分析及其优化[J].机械设计与制造,2010(1):106-108.
[6]薛山.MATLAB 基础教程[M].北京:清华大学出版社,2011.
[7]邢婷婷.上下料机械手的运动学及动力学分析与仿真[D].青岛:青岛科技大学,2012.
