足履机器人的步行建模和运动仿真
2015-04-25杜微门玉啄陈光
杜微,门玉啄,陈光
(长春工程学院,吉林长春130012)
0 前言
行进机构的运动稳定性、越障性和适应复杂地形能力是搜救机器人机械结构研究的关键技术。目前机器人的行进机构主要包括轮式、足式、履带、轮子履带复合式和仿生式[1-6]。针对现有行进机构的优缺点,设计了足履机器人,它兼具了足式和履带的共同优点,在行进过程中可以互补其缺点。并利用ADAMS 建立了双足履带机器人简化模型进行运动仿真。

图1 足履机器人模型
1 足履机器人虚拟样机模型的建立
1.1 机器人模型建立和行进方式
足履机器人简化建模如图1 所示。足履机器人采用内膝式结构,与人腿类似,一共两条腿,每条腿由大腿和小腿组成。在足履机器人中,主要靠履带来转向,所以每条腿只建立了3 个自由度,髋关节,膝关节和踝关节的转动。有两种行进姿态,履带式和足式,分别如图2、图3 所示。

图2 履带式行进方式
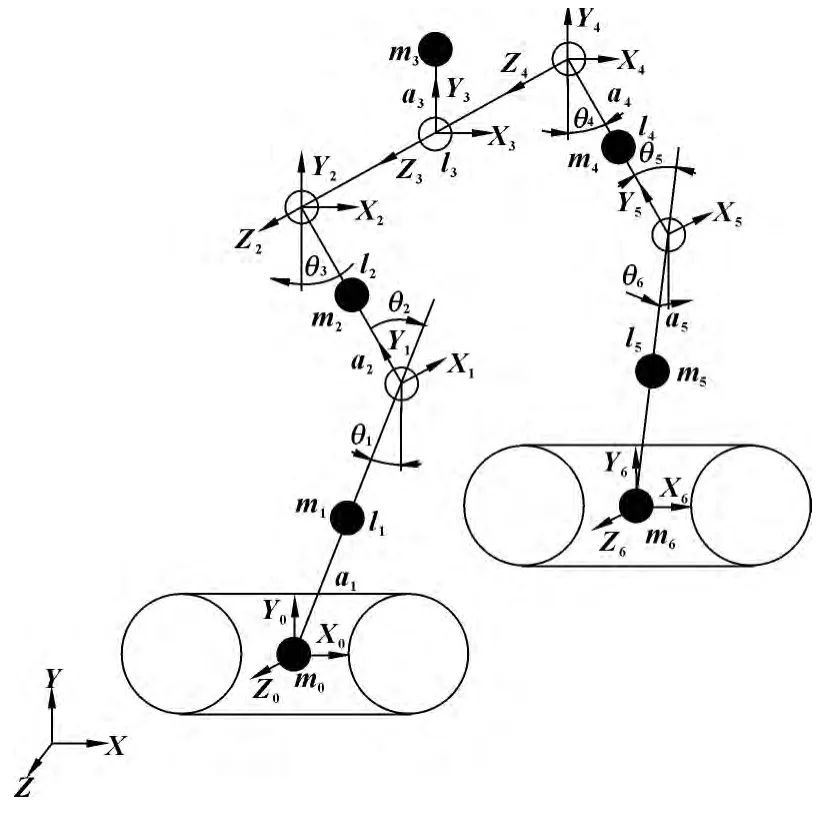
图3 足式行进方式
1.2 机器人足式行走模式运动学模型建立
足式机器人在行走过程中是在支撑相和摆动相之间进行变换的。整个行进过程中运动是由关节的转动来完成的。关节处的转动获得方式可以由转动到转动的驱动方式和直动到转动的驱动方式两种,无论哪一种都应该在获得驱动函数后才能进行驱动。而且驱动函数应该满足行进平稳,无明显冲击,足与地面之间无滑动和拖地现象发生[7]。
如图3 所示,在足式运动中通过建立坐标系确定机器人各构件间的位姿关系。进而对足端进行步态规划。其中m 为机器人总质量,mi为第i 个构件质量,X0~Xi,Y0~Yi,Z0~Zi为关节处坐标,xi为第i 个质心点在X0Y0Z0的X 轴坐标,yi为第i 个质心点在X0Y0Z0的Y 轴坐标。l1~l5为各个杆长,假设各杆长相等,θ0~θ6为各个关节的转角,a1~a5为各个关节到质心的距离。
图中XYZ 是世界坐标系用A 表示,X0Y0Z0为右脚履带中心位置局部坐标系,用B 表示,则任意Bi表示为:

根据图3,通过坐标变换求得各回转关节处的坐标。以右腿为例求得膝关节和髋关节处坐标关节处坐标方程:

为了足端落地时没有冲击和波动,踝关节采用正弦加速度的运动方式,经过积分得到其位移的运动轨迹方程为[8]:

机器人由履带结构代替了脚的结构,履带上设计了弹簧缓震机构,所以假设机器人在起步、落地和行走时履带始终与地面保持平行。机器人的身躯规划为水平匀速运动,则右腿髋关节运动方程为:

根据图3 和公式(2)、(3)、(4)得到右腿的关节转角的约束方程为:

同理可以求出左腿的运动轨迹。
根据图3 可求得的关节处转角,并可计算出质心坐标方程:

式中:

2 足式运动模式的运动仿真
在ADAMS 中使用step 函数编程,保证两个足端的运动行为满足表1 要求。
表1 两个足端的运动行为
样机的大小腿杆长均为90 mm,脚长80 mm,两腿之间距离100 mm,步幅为100 mm,前两步的抬腿高度为5.5 mm,后面的抬腿高度10 mm,运动周期为1 s,G 为25 mm。机器人的运动学仿真如图4 所示:机器人的初始状态为下蹲,然后左右脚交替行走,停止时回到双脚下蹲状态。

图4 双足机器人运动学仿真
机器人的足端和质心在Y 轴和Z 轴的运动轨迹如图5 和图6 所示。机器人左腿和右腿在Z 轴的运动轨迹如图7 和图8 所示。从图6 的运动轨迹可以看出,质心运动曲线在较大步幅的情况下基本平滑,上下波动不大,抬腿高度越小,上下波动越小,运动越平稳。从曲线上可以看出在落脚的地方机器人稍有些波动。履带式行进方式在跨越壕沟时,跨越的壕沟尺寸为脚长的,当采用腿式运行方式跨越壕沟时步长步幅,仿真的步长为100 mm,远远大于履带行进方式跨越壕沟的壕沟的尺寸。进一步说明了足履联合方式的优越性。

图5 足端运动轨迹

图6 质心的运动轨迹曲线

图7 左腿髋关节、膝关节、踝关节运动轨迹

图8 右腿髋关节、膝关节、踝关节运动轨迹
3 结论
结合履带和腿式的共同特点,建立了足履机器人的行走模型,由于它兼具了足式和履带的优点和缺点,所以可以在运动中进行互补,即可以根据不同的路面特征,采用不同的行进模式。文中主要建立了这种模式下足式行进的步态规划,并使用ADAMS 进行仿真,验证了所建立数学模型的可行性。为下一步的控制研究建立了基础。
[1]CHESTNUTT J,LAU M,CHEUNG G,el al.Footstep Planning for the Honda ASMOHum suoid[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005.
[2]EMDO G,NAKANISH J,MORINOTO J,et al.Experim Ental Studies of a Neural Oscillator for Biped Locomotion with QRIO[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,2005.
[3]梶田秀司.仿人机器人[M].管贻生,译.北京:清华大学出版社,2007.
[4]阮晓钢,仇忠臣,关佳亮.双足行走机器人发展现状及展望[J].机械工程师,2007(2):17-19.
[5]NISHIWAKI K,KAGAMI S,KUNIYOSHI Y,et al.Toe Joints that Enhance Bipedaland Full body Motion of Humanoid Robots[C]//Proceedings of the 2002 IEEE International Conference on Robotics & Automation,Washington,DC,2002.
[6]LIM H,TAKANISHI A.Biped Walking Robots Created at Waseda University:WL and WABIAN Family[J].Philosophical Transactions of the Royal Society A,2007,365(1850):49-64.
[7]陈佳品,程君实,冯萍,等.四足机器人对角小跑步态的研究[J].上海交通大学学报,1997(6):20-25.
[8]王立鹏,王军政,汪首坤,等.基于足端轨迹规划算法的液压四足机器人步态控制策略[J].机械工程学报,2013(1):39-44.
[9]王伟东,孔民秀,杜志江,等.移动手臂对机器人越障性能影响及运动规划[J].机械工程学报,2009(8):6-10.
