基于电磁导航智能车的控制研究及实现
2015-04-25王冠凌
吴 祥,王冠凌
(安徽工程大学电气工程学院,安徽 芜湖 241000)
引言
随着汽车的普及和技术的创新,汽车的智能化在生活中扮演着越来越重要的地位,其中自动驾驶智能汽车得到了快速发展[1-2]。智能车系统是高科技的综合体,与人工智能、自动控制、计算机等学科紧密相连。随着“中国制造2025”计划的提出,必将促进此方面的投入和发展,通过对汽车智能化自主驾驶技术的研究,为智能车带来更广阔的应用前景。全国大学生飞思卡尔杯智能车大赛是关于智能车的比赛,是为了促进智能化汽车的研究与应用。大赛共分为电磁组、光电组、摄像头组,在规定的赛道上进行比赛,在不冲出赛道的情况下,用时最短的即为获胜[3]。本文设计了一种电磁组的智能车控制方案。
1 总体设计
根据要实现的功能,智能车的硬件系统以飞思卡尔公司的32位微处理器MK60FN1M0VLQ15为控制核心,由电源模块、起跑线检测模块、电磁检测模块、速度检测模块、直流电机模块、舵机转向模块、人机交互模块等组成[3-4],其硬件框架如图1所示。用电磁检测模块采集路径信息,经过选频、放大、检波,输入到微处理器的A/D模块,把磁信号转换成电信号,进行数据处理,根据位置定位算法得到智能车相对于赛道的偏移位置。光电编码器实时监测智能车的速度并反馈给微处理器。微处理器通过控制算法综合判断,输出相应的PWM脉冲信号,进而控制电机和舵机,使智能车沿着中心线快速前行。人机交互模块方便对小车的调试。电源模块为各模块进行供电。
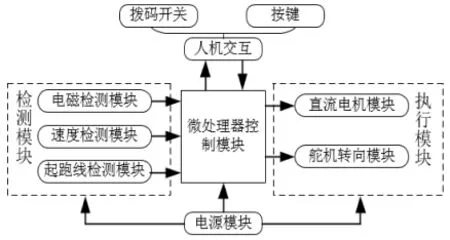
图1 智能车硬件框架图
2 硬件电路设计
2.1 电源模块
采用7.2 V直流电源,设计不同的变压电路,以供需要不同电压模块使用[5]。电机驱动模块采用升压芯片LM2731提供12 V电压,用来驱动半桥功率放大芯片IR2184;舵机正常工作的额定电压是 6 V,采用了LM26941芯片进行降压处理;微处理器主控模块、电磁检测模块、速度检测模块、人机交互模块等进行正常工作需要5 V供电,采用了LM2940芯片进行降压。
2.2 检测模块
电磁检测模块相当于人的视觉系统,进行信息采集,用来确定智能车与中心线的相对位置。电磁检测模块的好坏直接影响数据收集的准确性。该模块包括感应、选频、放大、检波四个部分。赛道中心通有交变电流的漆包线,电流是100 mA、频率为20 kHz。由麦克斯韦电磁场理论可知,以导线上的各点为圆心,辐射发出不同强度的磁感线。本文选用了6.8 nF的电容和10 mH的工字电感组成LC串联谐振电路进行感应,选出20 kHz的交变磁场信号,滤除其他频率的干扰信号。选出的有用交变磁场信号通过电感线圈产生感应电动势,感应电压数据量较小,不宜进行后期处理,要对其进行放大处理。放大芯片采用OPA1612,它具有超低失真、处理速度快、处理带宽宽、单位增益稳定等,放大倍数可以达到百倍以上,足以达到处理数据的需要。采用肖特基二极管构成检波电路,得到的直流电压和感应电动势呈现一定的关系。将得到的直流电压传输到微处理器的采集接口进行处理。
为实现简单而又不失精度,控制起来方便可靠,使用了5个传感器,为了保证智能车的前瞻性,经过反复试验得到,传感器距离车身为24 cm,离地高度为8 cm。最外2个和中间的传感器和车身平行放置,其余2个与中心线呈45°夹角放置。对采集的数据进行均值滤波,能够快速准确地检测智能车和中心线的相对偏移位置[6-7]。
智能车在前行的过程中,并不是速度越快越好,当遇到直角弯道、S弯道、交叉弯道时,速度要进行相应的减小才能平稳通过。为了实现速度的闭环控制,设计中采用了欧姆龙编码器E6A2-CW3C光电编码器来反馈速度。该编码器的脉冲速率为500线,测速精度高;最高响应频率为30 kHz,实时性较好;同时操作简单等优点。微处理器的FTM模块通过接收处理编码器采集的数据而得到当前速度。
根据比赛要求,赛道起始位置的两边,分别铺设3个磁场强度为3000 Gs~5000 Gs的磁铁,作为检测的标志。本文采用了干簧管进行探测感知,实现智能车的起跑。
2.3 执行模块
执行模块包括直流电机模块和舵机转向模块。舵机相当于智能车的方向盘,执行打角的方向和大小。使用的是大赛规定的S-D5型舵机,力矩为5.0 N·m,定位精确。通过微处理器输出的PWM波控制转角的方向和角度大小。
电机是大赛提供的RS-540直流电机,在最大功效时,转速是19740 r/min,电流是13.0 A,力矩是30.6 N·m,输出功率是63.2 W。由上述指标可以看出,该电机在工作时电流大、功率高,所以微处理器产生的PWM波无法进行驱动,因此需要设计电机驱动模块来驱动电机。本设计采用2块半桥驱动芯片IR2184组成全桥驱动电路,4个MOS管搭建H桥电路,此电路设计,导通阻抗小、驱动能力强、额定工作电流可以达到100 A以上,大大提高了电动机的工作转矩和转速,同时采用74HC02芯片转变电平,实现电机的正反转。电机驱动原理如图2所示。

图2 电机驱动原理图
3 软件设计
3.1 舵机控制
舵机控制主要控制小车的行驶方向,由于加入I控制会引起超调,造成舵机的抖动,所以不采用I控制,在正确得到偏差ek的基础上,采用PD控制舵机。当偏差在增大时,说明上次的动作的没有补偿够偏差,此时要求P参数要增大;当偏差在减小,说明智能车在趋于直道行驶,此时要求P参数要减小[8]。参数P和曲率ρ呈现一定的线性关系式。

根据位置式PD控制公式:

式(2)中,u、ek-1、ek分别为微处理器输出、当前输入、上一次的输入。得到:

其中,SPWM、Smid分别为微处理器输出PWM波、舵机中值时的PWM波,从而实现对舵机的控制。
3.2 电机控制
经典PID因其控制精度高、鲁棒性强及实现简单,在工业自动化等领域得到广泛的应用。智能车控制是一种模糊不确定的、非线性的、较复杂的系统,仅用经典PID控制具有滞后性,因此在电机控制设计中提出了模糊控制与经典PID相结合的方法,实现参数〛Kp、Ki和Kd的在线自整定,不仅继承了经典PID算法的优点,而且具有实时性好、灵活性大、精度更高等优点,实现对不同工况的最优控制[9]。模糊PID控制器构成如图3所示。

图3 模糊PID控制器构成图
3.2.1 变量确定及模糊化
设计采用的是两输入三输出的模糊控制器,输入变量e和ec分别表示误差以及误差的变化率,输出变量Kp、Ki和Kd是经模糊推理得到的三个参数。将偏差和偏差变化率量化到(-6,6)的区域内,三个输出变量量化到(0,6)的区域内。为实现系统的控制精度、灵活性,根据参数的特性和前人的经验,偏差e、偏差变化率ec以及输出量Kp、Ki和Kd的模糊子集均取7个模糊状态,即负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。为了提高整个系统的可靠性,NB、PB模糊函数选择高斯型隶属函数,其余模糊函数选择三角形隶属函数作为系统误差e、误差变化ec和输出量Kp/Ki/Kd的隶属度函数。其中e/ec的隶属度函数图相同。如图4所示。

图4 e的隶属度函数图
3.2.2 模糊规则表
模糊规则表主要是找出输入变量和输出变量之间的关系。即根据偏差e和偏差变化率ec,通过模糊规则表,在线实时输出参数Kp、Ki和Kd,作用于被控对象,以满足不同的工况。通过查阅相关资料以及在Matlab中对不同规则的和参数的仿真和验证,设定模糊整定规则为:当偏差较大时,先令Ki为零,这样不会出现很大的超调,同时Kp取值较大、Kd取值较小,为了让系统加快响应;当偏差和变化率中等时,Kp取值较小,Ki和Kd取值大小要适当,使超调小、获得较好的稳态性能;当偏差较小时,Kp和Ki的取值较大,同时避免设定值附近振荡,Kd的取值适当,增强系统的抗干扰能力,最终获得控制器良好的静态和动态性能[10]。根据 PID参数的整定原则及模糊整定规则,经过Matlab仿真和实验修改,采用if-then形式,可得Kp、Ki和Kd的整定规则,见表1。
3.2.3 模糊推理及反模糊化
变量经过模糊化,由精确值变成相对于各模糊子集的隶属度,经过模糊规则得到输出量相对于各模糊子集的隶属度,在经过模糊推理和反模糊化,得到模糊控制器输出的精确值,作用于被控对象。本文采用了广泛使用的MAX-MIN模糊推理方法,即将规则前提逻辑组合的隶属程度与结论命题的隶属函数作min运算,求得结论的模糊程度,对所有规则结论的模糊程度作max运算,得到模糊推理结果。
反模糊化又称解模糊,就是将模糊推理得到的模糊值进行精确化的过程。常使用的反模糊化方法包括:最大隶属度法、重心法、隶属度限幅元素平均法、系数加权平均法。最大隶属度法即取隶属函数中隶属度最大的值作为结果的输出,相较与其他三种方法,虽简单易行,因其忽略了隶属度较小的模糊状态,所以不具有代表性。重心法从理论上来讲,属于较精确的解模糊方法,但其操作起来比较复杂,对于要求实时性较高的智能车来讲,不是很好的选择。系数加权平均法和隶属度限幅元素平均法相比,加权平均法具有方法简单、灵活性强的优点,常用于工业控制中[11]。因此设计中的反模糊化方法全部使用加权平均法。

表1 Kp、Ki和Kd的整定规则表

式中,U为控制器经反模糊化输出的精准控制量,μi为输出对各模糊子集的隶属度,Ui为各输出模糊子集对应模糊单点集的值。图5为模糊推理输入/输出关系曲面图。

图5 模糊推理输入/输出关系曲面图
3.3 Matlab仿真
通过查阅智能车的相关资料,结合本车的实际情况,最终简化模型的传递函数为:

采样时间为1 ms,在Matlab/Simulink中进行仿真比较,如图6所示。图6中,曲线(a)为用模糊PID仿真的曲线,曲线(b)为用传统PID进行的仿真。相比较可知,采用模糊自整定PID控制器,能快速达到稳态,抗干扰能力更强,取得了良好控制效果,满足智能车控制和高指标的要求。

图6 仿真曲线对比图
4 结束语
本文设计了一种基于飞思卡尔智能车电磁组的实施方案。在硬件方面,对各功能模块进行了介绍,其中重点阐述了电磁检测模块和电机驱动模块。在软件方面,提出了基于模糊PID在线整定的控制算法,通过进行Matlab仿真,该算法的有效性得到了验证。通过智能车在赛道测试,测试结果见表2。由表2可知,与传统PID相比,该算法对复杂工况的适应程度更好、控制精度更准、抗干扰能力更强,平均速到能够达到2.5 m/s,很好地完成智能车的高速稳定的自循迹。

表2 赛道测试比较结果
[1] 熊和金.智能汽车系统研究的若干问题[J].交通运输工程学报,2001,1(2):37-40.
[2] 蔡翠.我国智慧交通发展的现状分析与建议[J].公路交通科技,2013,9(6):224-227.
[3] 卓晴,黄开胜,邵贝贝.学做智能车:挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[4] 杨东轩,王嵩.ARM Cortex-M4自学笔记:基 KinetisK60[M].北京:北京航空航天大学出版社,2013.
[5] 黄玉水,黄辉,周美娟,等.电磁导航式智能车的设计与实现[J].自动化仪表,2014,35(5):72-76.
[6] 马仕伯,马旭,卓晴.基于磁场检测的寻线小车传感器布局研究[J].电子产品世界,2009,10(12):41-44.
[7] 于寒,沈世斌.磁导航智能车定位计算方法研究[J].渤海大学学报:自然科学版,2014,35(1):55-60.
[8] Dwyer O.A Handbook of PI and PID controller tuning rules[M].London:Imperial College Press,2003.
[9] 魏建新.足球机器人模糊PID控制算法的应用研究[D].重庆:重庆理工大学,2012.
[10] 刘金锟.先进PID控制及其Matlab仿真[M].北京:电子工业出版社,2003.
[11] 赵文峰.基于Matlab 6.x的控制系统设计与仿真[M].西安:西安电子科技大学出版社,2002.
