Inter-limb and intra-limb coordination control of quadruped robots
2015-04-22LIHuashi李华师HANBaoling韩宝玲LUOQingsheng罗庆生
LI Hua-shi(李华师), HAN Bao-ling(韩宝玲),, LUO Qing-sheng(罗庆生)
(1.School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China; 2.School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China)
Inter-limb and intra-limb coordination control of quadruped robots
LI Hua-shi(李华师)1, HAN Bao-ling(韩宝玲), LUO Qing-sheng(罗庆生)2
(1.School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China; 2.School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China)
To realize the coordinated and stable rhythmic motion of quadruped robots (QRs), the locomotion control method of QRs based on central pattern generator (CPG) was explored. In traditional control strategies based on CPG, few CPG models care about the intra-limb coordination of QRs, and the durations of stance phase and swing phase are always equal. In view of these deficiencies, a new and simpler multi-joint coordinated control method for both inter-limb and intra-limb was proposed in this paper. A layered CPG control network to realize the locomotion control of QRs was constructed by using modified Hopf oscillators. The coupled relationships among hip joints of all limbs and between hip joint and knee joint within a limb were established. Using the co-simulation method of ADAMS and MATLAB/Simulink, various gait simulation experiments were carried out and the effectiveness of the designed control network was tested. Simulation results show that the proposed control method is effective for QRs and can meet the control requirements of QRs’ gaits with different duty factors.
quadruped robot; locomotion control; central pattern generator (CPG); inter-limb coordination; intra-limb coordination; Hopf oscillator
A quadruped robot (QR) not only possesses better motion stability than a biped robot, but also avoids the structural redundancy and complexity of a hexapod robot. Thus, there have been more and more studies on QRs. In this research field, locomotion control of QRs, especially the multi-joint coordinated control, is the research focus and difficulty. Currently, there are three common locomotion control methods for multi-legged robots, namely: model-based method, behavior-based method and biological control method based on central pattern generator (CPG)[1-2]. The CPG control method is a novel method inspired by biological concept. Compared with the other two methods, it can efficiently enhance a robot’s motion stability and environmental adaptability. In terms of coordination of multi-degree of freedom, it has special advantages[3-4].
In recent years, many researchers have introduced CPG mechanism into the locomotion control of QRs. Kimura et al.[5-6]constructed a CPG control network for QRs by using improved Matsuoka neuron oscillators, and achieved the adaptive dynamic walking of QRs Patrush and Tekken. Ijspeert[7]applied CPG to the gait control of QR PUPPY II and constructed a CPG network to control the robot’s hip joints. Zhang Xiuli[2]constructed a CPG network modified from Kimura’s CPG model to control QR Biosbot’s hip joints and introduced a hip-to-knee mapping function outside the CPG network to control the robot’s knee joints. Huang Bo[8]adopted Kimura oscillators to build a CPG control network for a robot’s hip joints coordination. One problem with these researches is that the CPG control network is only used to control robot’s hip joints and achieve inter-limb coordination, and as for the coordinated control of joints within a limb (intra-limb coordination), other control methods are used or none consideration has been taken. Actually, animals’ CPG mechanism contains the coupled relationship among all joints (inter-limb and intra-limb). Consequently, these researches don’t take full advantage of the CPG’s coupling property. Moreover, the output signal of most of CPG models shares the same rise time and fall time, which means the durations of stance phase and swing phase are equal when robot is walking. This is not in accordance with the walk gait of QRs because the duty factor can’t be 0.75.
In this paper, a new and simpler multi-joint coordinated control method is proposed. CPG is used in the method to achieve not only inter-limb coordination but also intra-limb coordination. A layered CPG control network for QRs is constructed by adopting modified Hopf oscillators. The coupled relationship among hip joints of all limbs and the coupled relationship between hip joint and knee joint within a limb are established. Virtual prototype model of QR is built and co-simulation experiments are carried out to validate the effectiveness of the designed control network.
1 QR and virtual prototype model in ADAMS
A bionic QR developed in our laboratory is taken as the control plant. The mechanical structure model of the QR is shown in Fig.1. The robot consists of a trunk, two pairs of side-sway parts, two pairs of thigh parts and two pairs of shank parts, and forelegs and hind legs are symmetrically distributed. The overall dimensions of the robot are 1 000 mm×400 mm×1 000 mm and the total weight is 100 kg. Each leg has two joints (hip joint and knee joint) and three degrees of freedom (DOFs): hip rolling, hip pitching and knee pitching. All the joints are driven by hydraulic cylinders.

Fig.1 Mechanical structure model of the QR
To conduct kinematics and dynamics simulation of the QR, using ADAMS software, the virtual prototype model of the QR (Fig.2) is built. In order to analyze the basic characteristics of the robot walking in leg-sagittal plane conveniently, each leg of the virtual prototype model has only two rotary pitch DOFs: hip pitching and knee pitching.

Fig.2 Virtual prototype model of the QR
2 CPG unit model and dynamic characteristics analysis
2.1 CPG unit model
Currently, there are two kinds of typical CPG models applied to the locomotion control of robot: neuron models and nonlinear oscillator models[9]. Neuron CPG models such as Matsuoka model and Kimura model[5]are characterized by explicit biological significance. However, there are too many parameters used to describe these models. Meanwhile, equations used to describe these models are nonlinear, strongly coupled and of high dimension, so these parameters are too difficult to be adjusted and dynamic characteristics analysis of these models is far more complicated than others. By contrast, the latter type of model, such as Kuramoto phase oscillators, Hopf harmonic oscillators and VDP oscillators, is well-developed with less parameters need to be adjusted.
The main task of the CPG model is to generate stable and periodic oscillation signal. In order to make the CPG model more suitable for engineering application, a CPG model characterized by simple form, less parameters, small amount of calculation and facilitated analysis is a better choice on the premise that stable and periodic oscillation signal could be generated. In this paper, Hopf oscillator is selected as a CPG unit model, which is a simple harmonic oscillator and the amplitude and frequency of the output signal are easy to control. The Hopf oscillator can be described as
(1)
wherexandyare state variables,r2=x2+y2,μdetermines the amplitude of oscillations,ωis the frequency of oscillations, andαis a positive constant which controls the speed of convergence to the limit cycle.
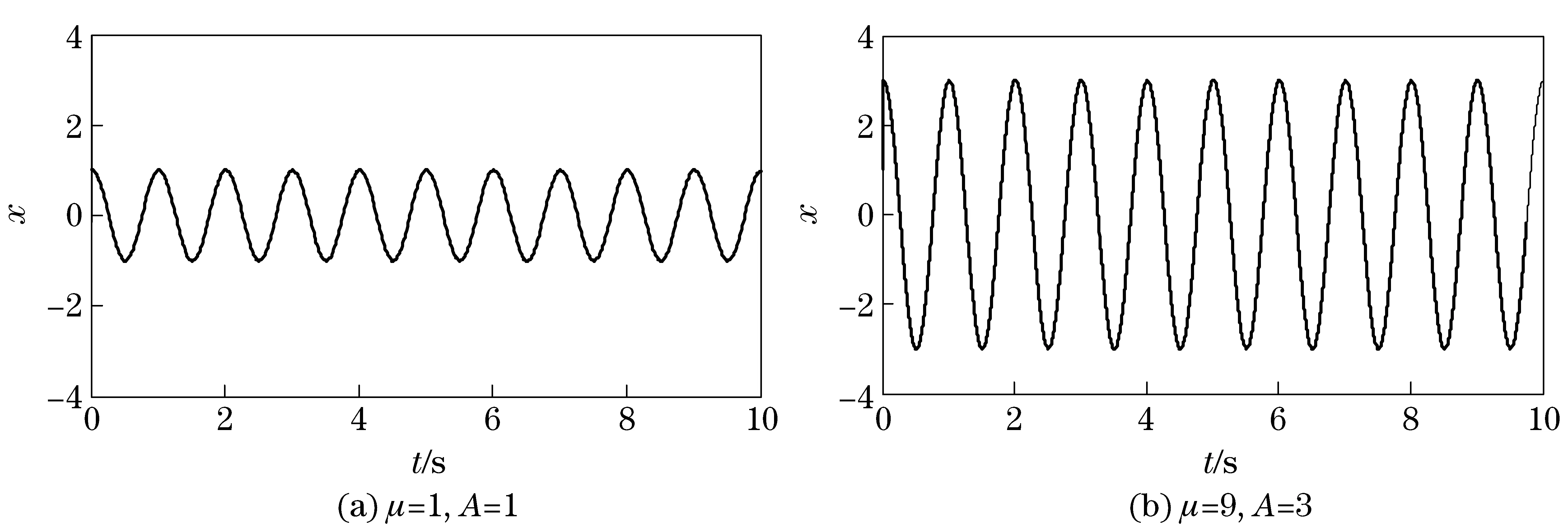
Fig.4 Output curves of Hopf oscillator with different μ
The generated output curvexof the oscillator is used as the control signal for a joint of the QR. Fig.3 shows the corresponding relations between robot motion phase and the output curvexof the oscillator. In Fig.3, the ascending stage of the curve corresponds to swing phase and the descending stage corresponds to stance phase.

Fig.3 Corresponding relations between robot motion phase and the output curve of oscillator
As shown in Fig.3, the Hopf oscillator described by Eq.(1) can generate stable and periodic oscillation signal, but the ascending and descending parts of the output curve have equal durations. In order to achieve an independent control of the durations of these two parts, we use the modified form as[10]
(2)
whereωswis the frequency of swing stance,ωstis the frequency of stance phase,adetermines the alternation rate ofωbetweenωswandωst, andβis the duty factor, that is the proportion of stance phase to the gait period.
2.2 Dynamic characteristics analysis of modified Hopf oscillator
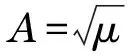
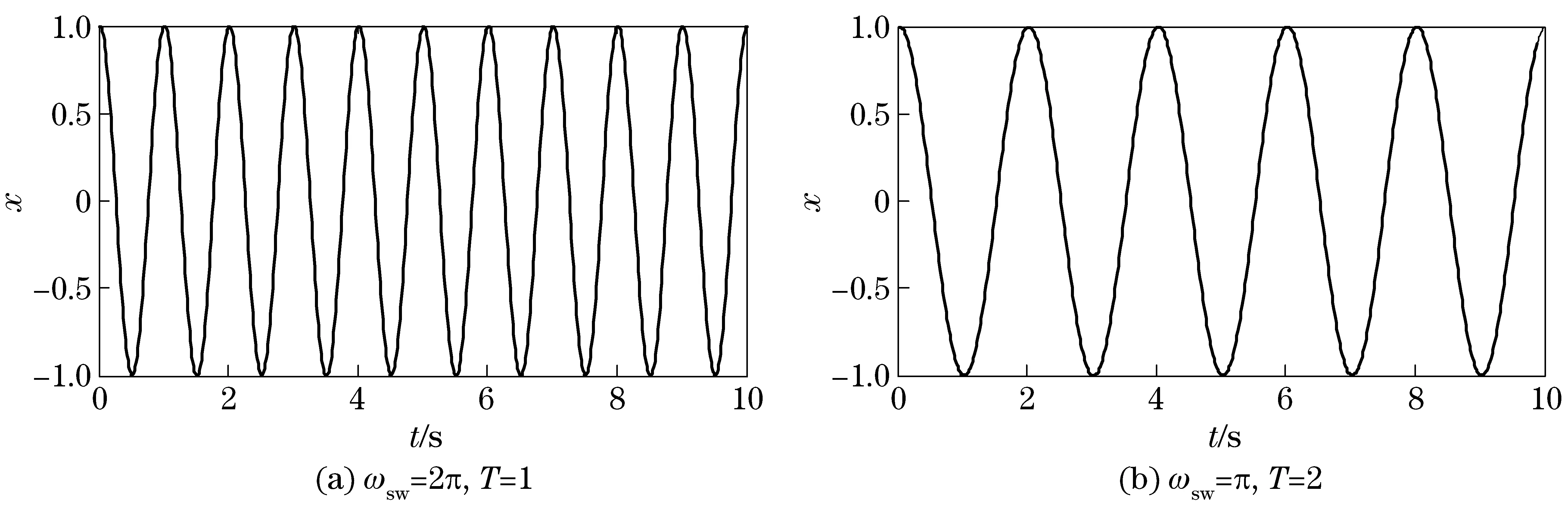
Fig.5 Output curves of Hopf oscillator with different ωsw

Fig.6 Output curves of Hopf oscillator with different β
3 CPG control network for QR
3.1 Structure of CPG control network
As what mentioned before, the QR has 8 active joints containing 4 hip joints and 4 knee joints, so 8 Hopf oscillators are needed and one oscillator controls one joint. However, if 8 oscillators are connected all together, the CPG control network will be very complicated and the application of the CPG network to more joints will be confined. In this paper, 8 oscillators are divided into 2 layers. A layered CPG control network for QR is constructed, as shown in Fig.7.
Fig.7 Layered CPG control network for the QR
In Fig.7, the 1stlayer of the control network consists of 4 coupled oscillators which control 4 hip joints of different limbs and the network connection mode adopts symmetrical mesh topological structure. And in the 2ndlayer, each knee joint oscillator couples with the corresponding hip joint oscillator in unidirectional way. The outputs of CPG are used as joint angle control signals. Using this control network, the angle control signals of 4 hip joints can be obtained through the coupled 4 hip joint oscillators, and the control signal of each knee joint can be obtained through the unidirectional coupling with the hip joint in the same limb.
3.2 Inter-limb coordination
The inter-limb coordination is achieved by establishing the phase coupling relationship among 4 hip joint oscillators. The mathematics model of the CPG control network consisting of 4 hip joint oscillators are as
(3)

(4)
Eq.(3) can be rewritten as
(5)
where Q=[x1y1x2y2x3y3x4y4]T,

QR has four kinds of typical gaits: walk, trot, pace and gallop. Each gait has its own trait. Walk gait is characterized by walking action shifting from one leg to another. The trait of trot gait is that legs in diagonal swing and support simultaneously. The trait of pace gait is that ipsilateral legs swing and support simultaneously. Finally, the trait of gallop gait is that front (hind) legs swing and support simultaneously. Fig.8 shows the relative phase of the four kinds of gaits.

Fig.8 Relative phase of the four kinds of gaits
In Fig.8, LF, RF, RH and LH denotes the left front leg, the right front leg, the right hind leg, and the left hind leg respectively. As for the walk gait, phase difference is 0.25 and duty factor is 0.75. As for the other three gaits, both phase difference and duty factor are 0.5. We set the left front leg as the reference one and define its phase asφLF. Then according to the value of phase difference for each gait, the phases of the other three legs can be obtained. Analyzing the values of these phases, the following laws are summarized.
φLF=0
(6)
IfφLH≠0, thenφRF=β-φRH,φLH=β
(7)
IfφLH=0, thenφRF=φRH,φLH=φLF
(8)

3.3 Intra-limb coordination
Motion laws between hip joint and knee joint within a limb of the quadruped mammal obtained by biological experiments are as follows.
① During stable locomotion, there is a fixed phase relationship between hip and knee joints within a limb.
② During swing phase, hip and knee joints are activated simultaneously. Specifically, at the earlier stage of the hip joint swing, knee joint pitches up; in the mid-term, knee joint stops pitching up; at the later stage, knee joint pitches down; in the end, knee joint restores to the starting position.
③ During stance phase, hip joint rolls backwards while knee joint is fixed.
The motion relationship between hip joint and knee joint within a limb can be expressed as Fig.9. Based on the motion laws, the intra-limb coupling relationship between hip joint oscillator and the corresponding knee joint oscillator so as to realize intra-limb coordination is established in this section.

Fig.9 Sketch map of motion relationship between hip joint and knee joint within a limb
According to Fig.9, the relative phase between hip joint oscillator and knee joint oscillator during stable locomotion could be obtained. We define the relative phase asθhkand it can be described as
(9)
Therefore, coupled matrix Rhkdescribing the coupling relationship between hip joint oscillator and knee joint oscillator is
(10)
Due to knee joint oscillator is connected to the corresponding hip joint oscillator in unidirectional way, the connecting weight matrix between them is defined as
(11)
The control curve of hip jointθh(t) can be gotten by the inter-limb coupling relationship, and then with the intra-limb coupling relationship, the control curve of knee jointθk0(t) can be obtained. Then according to the motion laws ② and ③ and combining motion laws of knee-type joints and elbow-type joints, the final control curve of knee joint can be expressed as
(12)
4 Co-simulation of ADAMS and MATLAB/Simulink
In order to verify the effectiveness of the proposed CPG control scheme, gait simulations of QR are carried out using the co-simulation method of ADAMS and MATLAB/Simulink. Co-simulation system model of QR is shown in Fig.10. In Fig.10, the CPG control system model consists of hip joint control model and knee joint control model, which outputs motion angle curves of 8 joints. The motion angle curves are inputted into the ADAMS model as control signal inputs, driving the joints of the robot to move, which leads to the realization of different types of gaits. Angle measurement curve of 8 joints and the centroid path are given by ADAMS model. Due to the similarity of pace gait, gallop gait and trot gait, which share the feature of dual-phase, the simulation results of walk gait and trot gait are merely demonstrated here.

Fig.10 Co-simulation system model of QR based on CPG
Only a few simulation parameters need to be adjusted in the CPG model proposed in this paper, including amplitudeμ, duty factorβand the phase of right hind legφRH.ωsw,αandaare constants, with values ofωsw=4π,α=10 000, anda=50. For walk gait,β=0.75,φRH=0.25, the design speed is 0.25 m/s, the gait period is 1 s, the amplitude of hip joint is 7.7° and the amplitude of knee joint is 5.3°. For trot gait,β=0.5,φRH=0, the design speed is 0.8 m/s, the gait period is 0.5 s, the amplitude of hip joint is 8.3° and the amplitude of knee joint is 5.3°.
4.1 Walk gait simulation
Joint angle control curves of walk gait are shown in Fig.11. LF, RF, RH and LH denote the left front leg 1, the right front leg 2, the right hind leg 3 and the left hind leg 4 respectively. In Fig.11, control curves generated by the CPG control model reach stable oscillation quickly. The hip joint control curves are in accordance with the phase relationship of walk gait strictly. And the phase difference between different legs is a quarter of the gait cycle, with a phase sequence of 1-4-2-3. Control curves of knee joint satisfy the motion relationship between knee joint and hip joint in the same leg.

Fig.11 Control curves of the walk gait
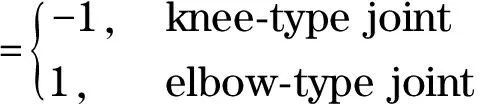
Fig.12 shows the displacement curves of robot mass center alongX,Y, andZ, whereX,Y, andZare directions of robot lateral motion, forward motion and vertical motion respectively. From Fig.12, we can see that the walking speed of the robot is about 0.24 m/s, which is close to the theoretical speed, and the curve alongYis very smooth. The maximum value of vertical fluctuation alongZis 5.4 mm, and the vertical fluctuation rate is 0.69% (the height of mass center is 780 mm). The maximum value of lateral shift alongXis 87 mm. So both the vertical fluctuation and the lateral shift are very small. These data show that the robot can walk smoothly and steadily. Simulation animation screenshots of the quad-
ruped walking are shown in Fig.13. The 4 major motion states of the robot in one gait cycle are demonstrated. These simulation results indicate that coordinated and stable walk gait can be realized.
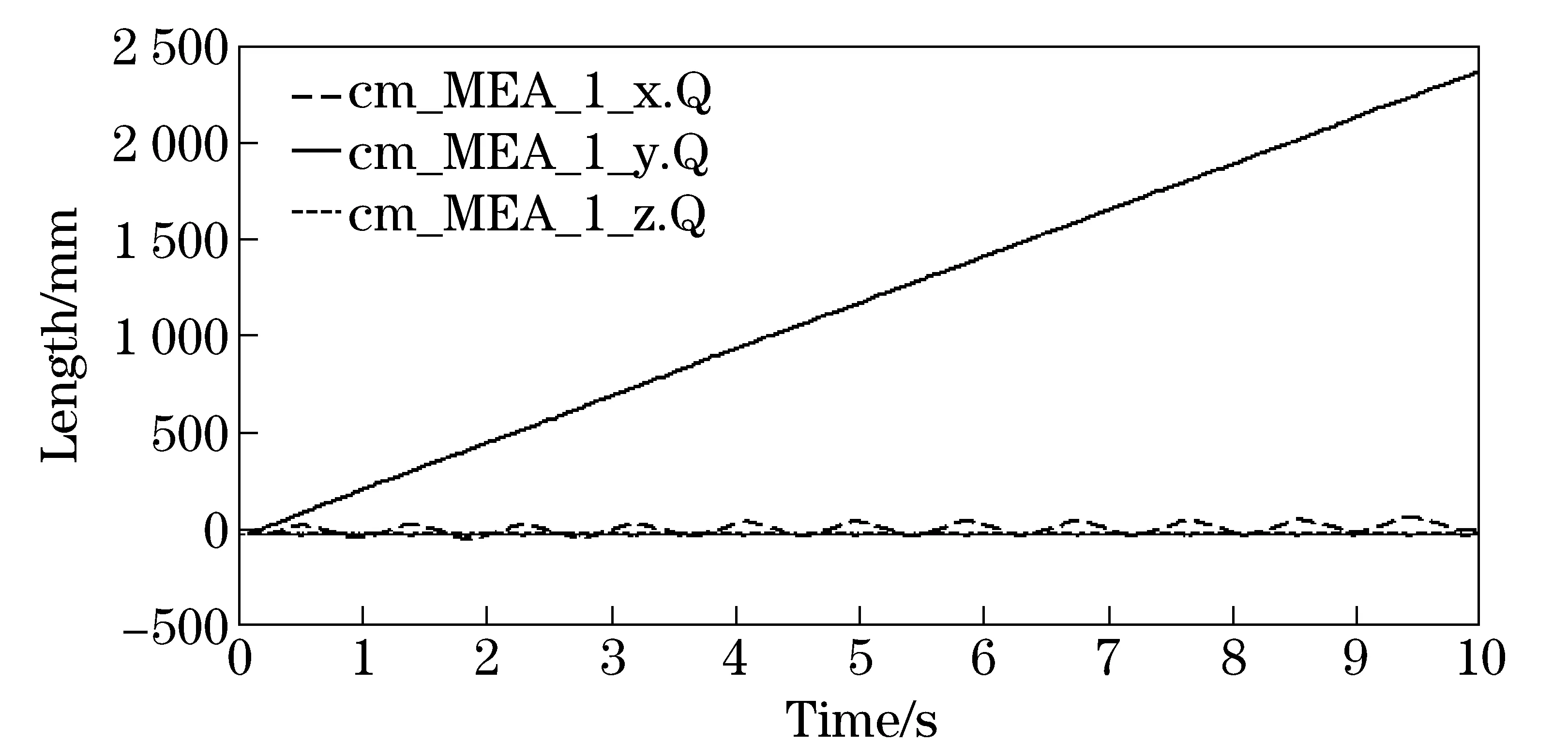
Fig.12 Displacement curves of robot mass center along X, Y, and Z

Fig.13 Screenshots of the quadruped walking
4.2 Trot gait simulation
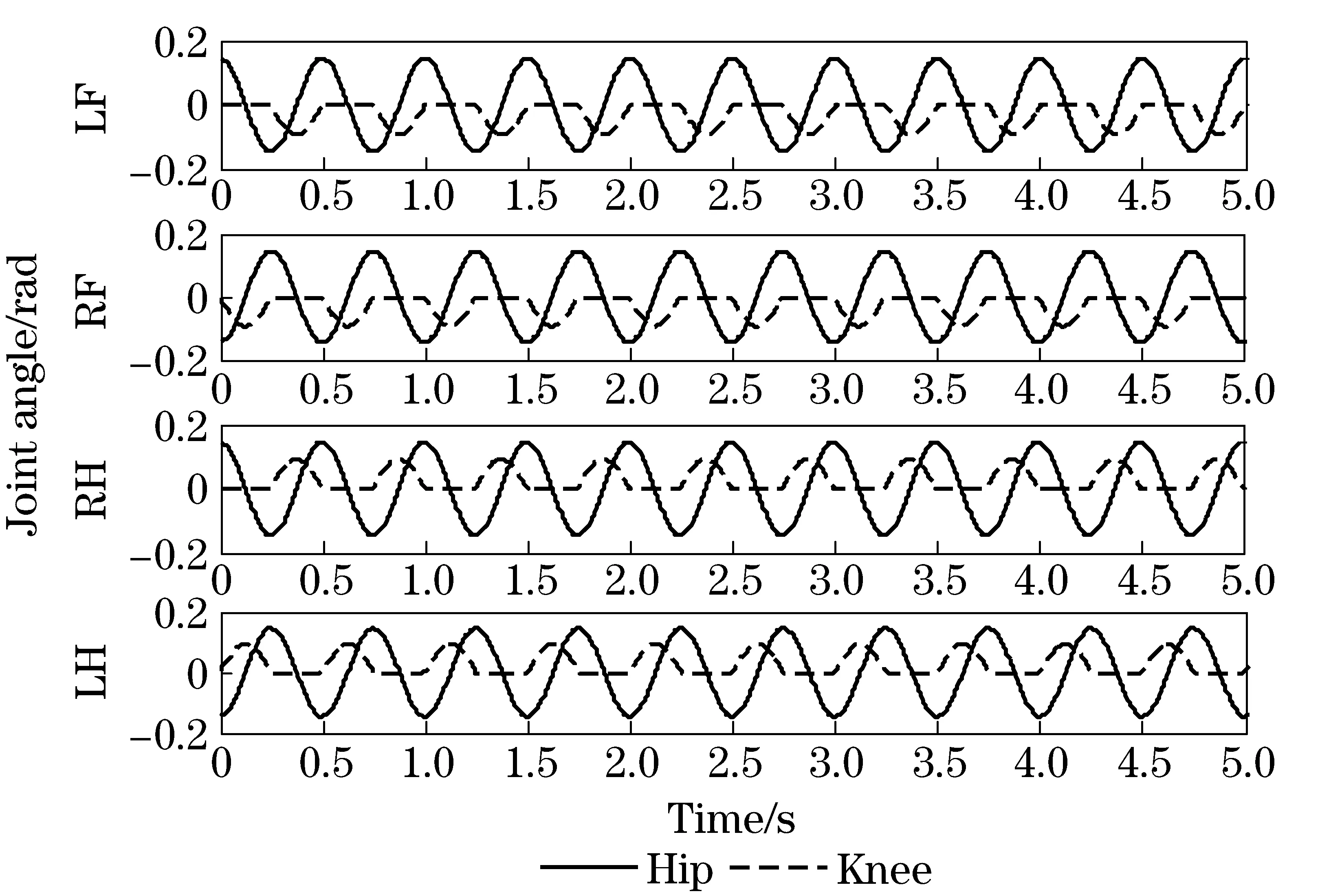
Fig.14 Control curves of the trot gait
Joint angle control curves of trot gait are shown in Fig.14. In Fig.14, it can be seen that the hip joint control curves are in accordance with the phase relationship of trot gait strictly, that is leg 1 and leg 3 are in-phase, as well as leg 2 and leg 4. The phase difference between these two pairs of legs is an half of the gait cycle. The knee joint control curves satisfy the motion relationship between knee joint and hip joint in the same leg.
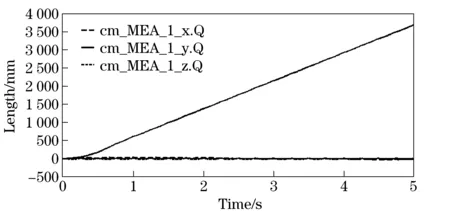
Fig.15 Displacement curves of robot mass center along X, Y, and Z
Displacement curves of robot mass center alongX,YandZand simulation animation screenshots are shown in Fig.15 and Fig.16. From these figures, we can see that the motion speed of the robot is about 0.74 m/s, which approximates the theoretical speed. The maximum value of vertical fluctuation alongZis 9.18 mm, and the vertical fluctuation rate is 1.18%. The maximum value of lateral shift alongXis 39 mm. So both the vertical fluctuation and the lateral shift are very small. These simulation results indicate that the robot can move smoothly and steadily and stable trot gait can be realized.
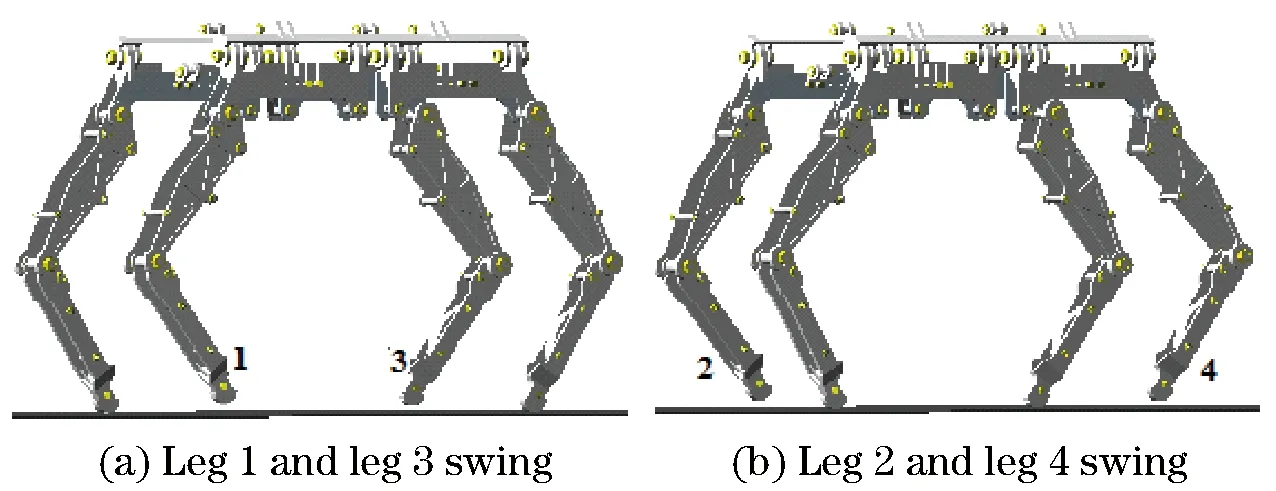
Fig.16 Screenshots of the quadruped trotting
5 Conclusion
In this paper, a biologically inspired control method based on CPG is used to study the multi-joint coordinated control of QRs. A layered CPG network is constructed adopting modified Hopf oscillator which is simple in model structure and easy in implementation with fewer parameters. The coupled relationship among hip joints of all limbs and the coupled relationship between hip joint and knee joint within a limb are established. Finally, co-simulation method of ADAMS and MATLAB/Simulink is used to verify the validity of the proposed control method. Simulation results demonstrate that the proposed multi-joint coordinated control method for inter-limb and intra-limb joints based on CPG can meet the control requirements of QR’ gaits with different duty factors and can make QR achieve stable and natural walk and trot gait. Applying CPG control network to inter-limb coordination and intra-limb coordination simultaneously can take full advantage of CPG’s coupling property, and it doesn’t need any extra control strategy or mathematic function outside the CPG model to care about the knee joints. In the future, we are going to develop an actual QR and implement the proposed CPG controller for it.
[1] Kimura H, Fukuoka Y, Cohen A H. Biologically inspired adaptive walking of a quadruped robot [J]. Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering sciences, 2007, 365(1850): 153-170.
[2] Zhang Xiuli. Biological-inspired rhythmic motion & environment adaptability for quadruped robot [D]. Beijing: Tsinghua University, 2004. (in Chinese)
[3] Zhang Xiuli, Zheng Haojun, Chen Ken, et al. Research on robotic bionics [J]. Robot, 2002, 24(2): 188-192. (in Chinese)
[4] Li Hongkai, Sun Jiurong, Dai Zhendong. The inspiration for the motion control of robot from central pattern generator of animal’s locomotion instruction [J]. Robot, 2008, 37(3): 279-288. (in Chinese)
[5] Kimura H, Fukuoka Y. Adaptive dynamic walking of a quadruped robot on irregular terrain by using neural system model [C]∥2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 2000.
[6] Kimura H, Fukuoka Y, Cohen A H. Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts [J]. The International Journal of Robotics Research, 2007, 26(5): 475-490.
[7] Buchli J, Ijspeert A J. Self-organized adaptive legged locomotion in a compliant quadruped robot [J]. Autonomous Robots, 2008, 25: 331-347.
[8] Huang Bo, Yao Yufeng, Sun Lining. Quadruped robot gait control based on central pattern generator [J]. Journal of Mechanical Engineering, 2010, 46(7): 1-6. (in Chinese)
[9] Wu Qidi, Liu Chengju, Zhang Jiaqi, et al. Survey of locomotion control of legged robots inspired by biological concept [J]. Science in China Series F: Information Sciences, 2009, 39(10): 1080-1094. (in Chinese)
[10] Righetti L, Ijspeert A J. Pattern generators with sensory feedback for the control of quadruped locomotion [C]∥2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, USA, 2008.
(Edited by Cai Jianying)
10.15918/j.jbit1004-0579.201524.0408
TP 242.6 Document code: A Article ID: 1004- 0579(2015)04- 0478- 09
Received 2014- 04- 01
Supported by the Ministerial Level Advanced Research Foundation (40401060305)
E-mail: hanbl@bit.edu.cn
杂志排行
Journal of Beijing Institute of Technology的其它文章
- Influence of shear sensitivities of steel projectiles on their ballistic performances
- Generalized ionospheric dispersion simulation method for wideband satellite-ground-link radio systems
- Multi-subpulse process of large time-bandwidth product chirp signal
- Factor-graph-based iterative channel estimation and signal detection algorithm over time-varying frequency-selective fading channels
- Nano-silica particles enhanced adsorption and recognition of lysozyme on imprinted polymers gels
- Similarity matrix-based K-means algorithm for text clustering