矩阵式变换器在船舶电力推进系统中的仿真*
2015-04-18詹轲倚高海波杨祥国
詹轲倚 高海波 杨祥国
(武汉理工大学能源与动力工程学院 武汉 430063)
0 引 言
在使用交流电机作为推进电机的船舶中,主要使用交-直-交变频器与传统的交-交变频器[1].交-直-交变频器存在的缺陷有:(1)需要容量较大的储能元件(电容或电感),变频器功率密度较低;(2)在只使用二极管不控整流时不能实现能量反馈,同时为避免制动时反馈电能时中间直流回路电压升高对电力器件的损坏,还需要设置制动电阻消耗掉回馈能量[2];传统交-交变换器也称周波变换器,主要缺点有:(1)输出频率受电网频率限制,通常只能为电网频率的30%~40%;(2)因采用相控方法,输出含有大量谐波,输入功率因素低.矩阵变换器属于交-交变换器,是一种直接变频电路,采用的是全控型开关器件,使用 “斩控方式”而非“相控方式”,这些特点使其具有以下优点[3]:(1)不需要直流储能环节,功率密度高;(2)产生正弦的输出电流与输入电压,且输入功率因素可调;(3)输出频率不受电网频率限制;(4)能实现能量反馈.矩阵变换器已在如电力战车,深海机器人,风力发电,飞机机翼控制等领域有实际应用[4-5].国外一些大学与科研机构也已经着手对其应用于船舶电力推进领域进行研究.如英国伦敦学院、诺丁汉大学,以及国防部于1997年展开了其在综合电力推进(IFEP)中的应用研究;美国海军将其作为全电力推进船(AES)研究的一个方向[6].国内关于矩阵式变换器的应用研究鲜有报道.船舶电网容量有限,对电能质量要求高,矩阵变换器的谐波含量少,可实现输入电压正弦化能改善船舶电网质量.船舶空间有限,电力推进船舶动力装置大多布置于船尾,而将船体中央的较大空间腾出,用作船舶目的的直接相关项目,然而船的尾部横截面较少,在尾部提供的浮托力要小,相应的,为了避免船体内部产生不可接受的应力,朝船尾安装的设备需要相对较轻.矩阵变换器不需要直流存储单元,功率密度高,相对传统变频器有重量上的一定优势.并且矩阵变换器的能量回馈对电机经常处于“做功”与“发电”状态下时也有一定意义,如在动力定位船舶(DP)上的运用,可以达到节能的效果.
1 矩阵变换器
1.1 基本拓扑结构
矩阵变换器是一种理论上可以实现任意m相输入到任意n相输出变换的交—交变换器[7].图1所示的是一种三相输入到三相输出的矩阵变换器拓扑结构.输入侧为a,b,c,输出侧为A,B,C.为双向开关,它能实现双向阻断电压和传导电流.目前并不存在完全符合要求的双向开关,图2为一种替代结构,其利用RB-IGBT反相并联近似实现双向开关的功能.
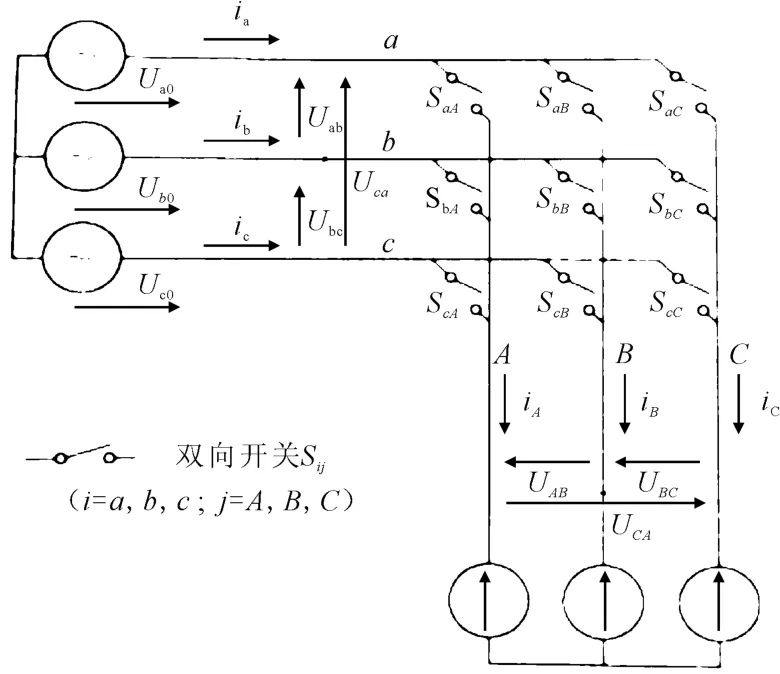
图1 三相—三相矩阵变换器拓扑

图2 RB-IGBT反相并联双向开关
1.2 双空间矢量调制算法
双空间矢量调制法是针对矩阵式变换器的一种高效调制算法,输入输出电压比可以达到0.866,大于矩阵式变换器提出初期的0.5.其主要思路是把矩阵式变换器假想成虚拟整流与虚拟逆变环节,分别运用空间矢量算法调制,再将得到的两组开关状态合成为矩阵式变换器的双向开关状态.对于虚拟整流环节,见图3左侧,输入侧可看作电压源,不能短路以避免产生大电流.任意时刻需满足两条直流母线有且只能有1个开关导通.对于虚拟逆变环节,见图3右侧,输出侧可看作电流源不能开路以避免产生大电压,任意时刻需满足每个输出相有且只有1个开关导通.
矩阵变换器双向关与虚拟整流与逆变开关函数等效关系为[8]

限定条件为1≤SGm+SJn+SKl

图3 双空间矢量调制示意图
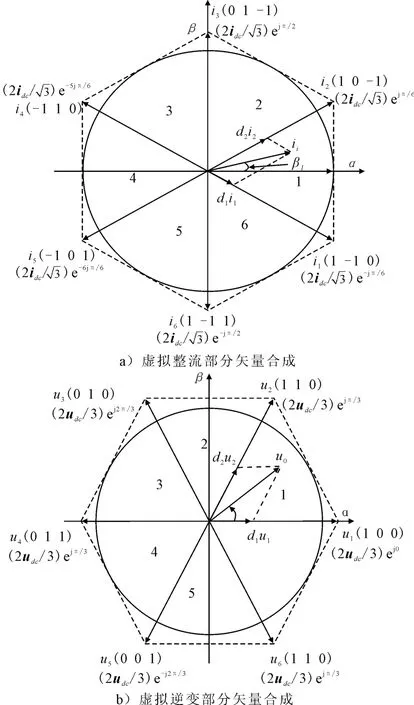
图4 虚拟逆变与虚拟整流矢量合成
式中:G,J,K ∈ {A,B,C};m,n,l∈ {a且G ≠K,m≠l
虚拟整流侧6个开关可得到9种电流不同矢量,6种为有效电流矢量,将1个周期平均分为6个扇区,如图4a)所示.以图中电流矢量i1为例,开关状态“1,-1,0”表示a相接直流正极,b相接直流负极,c相悬空,此时输入电流矢量为.任意输入电流可以由其两相邻电流矢量和零矢量合成得到.虚拟逆变侧6个开关可得到8个电压矢量.其中6个为有效电压矢量,其将1个周期平均分成6个扇区.如图4b)所示.以图中电压矢量u1为例,开关状态“1,0,0”表示A 相接直流正端,B,C连接直流负端,此时输出电压矢量为.任意输出电压可以由两相邻电压矢量和零电压矢量合成.输入相电流与输出线电压的合成如式(2)、式(3)所示.

式中:ii为期望输入相电流;iμ,iv为ii所处扇区两相邻电流矢量;dμ,dv为对应的占空比;ioc为零电流矢量;doc为其占空比;uo为期望输出线电压;uα,uβ为uo所处扇区两相邻电压矢量;dα,dβ为对应的占空比;uov为零电压矢量;dov为其占空比.图4示例中μ=1,v=2,α=1,β=2.
关于各基准电流矢量与电压矢量的占空比时间可由正弦定理与PWM原理得到,如式(4),(5)所示.

βi为期望电流矢量与所在扇区角平分线的夹角,如图4a)所示,满足.α 为期望电o压矢量与滞后分量夹角,如图4b)所示,满足0≤.m,m分别为电流与电压调制系数,分别cv满足与u分dc别为虚拟直流侧电流与电压.由输出线电压uo和输入相电流ii的扇区和扇区角.根据上述原理可选择对应的基本电压与电流矢量uα,uβ,iμ,iv零空间矢量uov与ioc,以及其对应的占空比.
2 永磁同步电机矢量控制
永磁同步电机模型具有多变量,强耦合的特点,在三相坐标系内求解困难.如果将电机模型由三相静止坐标变换到两相旋转坐标系(d-q坐标系)可得出永磁同步电机在d-q坐标系的电压方程,磁链方程,转矩方程:

式中:ud,uq分别为经坐标转换后d-q轴上电压;Ψd,Ψq为d-q轴上的磁链;Ψr为转子永磁体产生的转子磁链;Rs为定子绕组电阻;Lsd为定子直轴电感;Lsq为定子交轴电感;ω为转子旋转角频率;p为微分算子;pn为磁极对数.
矢量控制(磁场定向控制),通过控制永磁同步电机的定子三相电流使其合成电流矢量完全落在q轴上,使得id=0,iq=is.上述各项方程变为

经坐标变换后永磁同步电机模型见图5a).
磁场定向矢量控制示意图见图5b).永磁同步电机转子磁场Ψr恒定,由电磁转矩方程(11)可知,若能较为准确的测量到转子d轴的位置,控制电机定子的合成电流矢量恰好位于q轴上,就使得电磁转矩只与定子电流矢量幅值成正比.控制定子电流幅值就能直接控制电机转矩,此时永磁同步电机便有了与直流电机一样的控制特性.
3 模型建立与系统构成
系统由速度调节器(PI),电流调节器(PI),坐标变换单元,双空间矢量调制,矩阵变换器,永磁同步电机等环节组成,见图6.电机实际速度与给定速度相比较输入速度调节器,得到q轴参考电流.为实现矢量控制,设定d轴参考电流为0.d-q轴参考电流与实际电流比较,经过电流调节器得到d-q轴上参考电压与,坐标变换后得到三相静止坐标系中参考电压UA,UB,UC.将参考电压与输入相电流通过双空间矢量调制后控制矩阵式变换器的双向开关,便实现对永磁同步电机的矢量控制.

图5 永磁同步电机矢量图与磁场定向图
4 仿真实验结果分析
4.1 仿真对象
仿真对象为某船用永磁同步电机.由于目前还尚无实船运用矩阵变换器,本文采用该船使用的永磁同步电机参数对矩阵变换器在电力推进船舶推进船舶上的运用进行初步探索,永磁同步电机的参数如下:定子电阻Rs=0.001 5Ω,交、直轴与交轴电感Ld=Lq=0.000 47H;转子磁链ψf=3.5Wb;磁极对数Pn=8;转动惯量J=550 kg·m2;额定电压U=660V;额定转速n=200 r/min;额定转矩Te=195.2kN·m.

图6 系统结构图
4.2 仿真实验
对于船舶电力推进系统,在制动过程中电动机处于再生制动状态,电动机转子、螺旋桨和船体本身所存储的机械能是巨大的[9],可以转换成电能进行反馈,达到节能的目的.本文模拟电机由一到二象限运行,设定转速为200r/min,起始转矩为195.2kN·m,0.5s后变为100kN·m,于1.5s变为-100kN·m.

图7 仿真结果图
4.3 结果分析
由图7a),b)可看出,电机在负载变化时,转速都能很好的保持设定值,达到稳态后电磁转矩与给定转矩相等,且响应较快,运行平稳.说明此策略能保持矢量控制的优点.从图7c),d)中可看出,当转矩为正时,电机运行于第一象限,功率因素为“1”;当转矩为负时(1.5s),电机运行于第二象限,处于发电状态,功率因素变为“-1”,实现了能量反馈.输入电流THD=1.5%,符合船舶电网总谐波畸变率小于5%的要求.
5 结束语
本文从当前船用变频器缺陷出发,结合矩阵变换器不需要直流储能环节,输出频率不受电网频率限制,易于能量反馈等优点.将矩阵变换器结合电机矢量控制原理应用于船舶电力推进系统中.实验结果表明电机转速能保持设定值,转矩响应迅速,输入侧电流总谐波畸变符合要求且能实现能量反馈.矩阵变换器较为适用于推进电机需要经常工作于“做功”与“发电”状态的场合.今后可对其运用于用于动力定位船舶(DP)进行研究;还可从经济性,稳定性等方面对矩阵式变换器代替现在所用的交—直—交变换器以及传统交—交变换器进行可行性研究.
[1]高海波,高孝洪,陈 辉.船舶电力推进几种典型方式的比较[J].航海技术,2006(6):54-57.
[2]乔鸣忠,张晓锋,朱 鹏,等.变频器供电的船舶推进系统制动过程研究[J].武汉理工大学学报:交通科学与工程版,2009,33(5):864-867.
[3]孙 凯,黄立培,松濑贡规.基于矩阵式变换器的异步电动机矢量控制[J].清华大学学报,2004,44(7),909-912.
[4]PODLESAK T F,CLARE J C.A 150-kVA vectorcontrolled matrix converter induction motor drive[J].Transactions on Industry Applications,2005,41(3),841-847.
[5]WHEELER P W,CLARE J C,APAP M,et al.A matrix converter based permanent magnet motor drive for an eletro-hydrostatic aircraft actuator[C]∥Proceedings IEEE IECON’03,2003,3:2072-2077.
[6]石 艳,陈亚昕.船用矩阵式变换器[J].船电技术,2004,24(1),13-18.
[7]葛红娟,周 波,苏国庆,张 绍.矩阵变换器-永磁同步电机矢量控制系统的新型电流控制方法[J].电工技术学报,2007,22(3),21-26
[8]黄科元.矩阵式变换器的双空间矢量调制及其应用研究[D].杭州:浙江大学,2004.
[9]任洪莹,船舶电力推进永磁同步电动机制动过程的研究[D].大连:大连海事大学,2009.
