极地航行中海冰目标的雷达图像识别方法研究
2015-04-18倪汉健吴建华
倪汉健 吴建华
(中国卫星海上测控部1) 江阴 214000) (武汉理工大学航运学院2) 武汉 430063)
0 引 言
受全球变暖的影响,每10年极地的冰层就会减少3%.按照这样的速度,未来不久,这些冰层就将完全消失,通往极地的航路也将自然打通,极地航行可以缩短航程、提高营运效益,北冰洋航路就是连接大西洋和太平洋以及俄罗斯欧亚2部分的最短路线[1-4].然而在北极和南极地区航行的船舶面临着许多极地地区特有的风险,恶劣的天气条件,缺少良好海图、通信系统以及其他导航辅助设备等情况都是海员不得不面对的挑战.特别是当船舶驶入有冰或冰山区域时,由于阴暗、涌浪、雾和冰推力等因素影响船舶航行安全,极易发生船冰碰撞而导致船舶破损、沉没事件,因此,极地航行中尽早发现海冰,避免船冰碰撞是航海技术人员亟待解决的研究课题.因为在普通船用雷达上很难直接识别海冰图像,所以研究人员已经在开发探测海冰的专用雷达.但是采用另外配置独立的探冰雷达既增加船东的经济负担,又不符合现代航海仪器设备集成化发展的方向.本文旨在探索根据海冰的类型特征、海冰反射雷达波的特点,利用雷达回波处理技术综合分析冰山、冰面以及小块流冰的雷达回波图像,挖掘船用雷达现有的功能,达到识别、探测发现海冰从而避免船冰碰撞的研究方法.
1 海冰的类型特征
冰山是流到海上的陆冰,通常高数十米,长百余米.冰山经常是连续出现、而且伴随着浮冰群.刚刚离体的冰山,四面陡峭,回波比较强,发现距离可达20nmile以外.一般南极的冰山表面多陡峭,发现距离可在10nmile左右;而北极的冰山表明多倾斜,回波比较弱,若隐若现,有的发现距离甚至不足3nmile.有的冰山表面平坦,也有的冰山呈尖塔形,这些形状都不利于反射雷达电磁波.尖塔形冰山的吃水深度约为水面高度的1~2倍,而其水上和水下部分的 体积比例,视其对海水的密度而定,由式(1)可以计算出其水上和水下比例.

式中:di为冰山相对密度;ds为海水相对密度;V为冰山体积;u为水上体积.
例如,di=0.9,ds=1.03;则0.9V=1.03(V-u),V=8u.
分析可知,冰山水上和水下体积分别约为其总体积的1/8和7/8,水下部分远大于水上部分.随着时间的推移,海冰逐步融化,特别是水面上的海冰,其形状也随着海冰的融化变为大面积的冰面冰块,其高度逐渐降低,导致雷达探测距离变小.海冰进一步融化、分解后形成大片流冰,更容易被海浪分割,使得海冰回波被海浪杂波淹没,难以探测.
2 海冰反射雷达波的特点
冰区航行,可以使用雷达观测流冰接近的情况,雷达探测冰情的能力,取决于两者之间的距离、冰块的大小以及冰块反射面的倾斜角度.小块流冰和在平静海面上高度小于0.3m的冰块,较难被雷达发现.有风浪时,海浪干扰回波与冰块的回波也极不易辨别.所以不能因为雷达探测不到冰情而错误地认为船舶周围没有险冰的存在.
雷达观测有时可以发现冰山,但是由于冰山的形状、反射电磁波的性能等原因,小冰山也不容易发现,甚至200m长,高50~60m的较平坦冰山,有时在3nmile内才被雷达发现[5-6].
最危险的是融化剩余的残碎冰山,水面以上不大,但水下的体积巨大.雷达只能发现水面上的目标,所以发现残碎冰山困难.
平整的大面积冰面,大片浮冰在雷达上看不到回波,但能够看到冰与海水交界线的回波.
不平整的冰面会产生冰面杂波的干扰、干扰杂波一般较弱、不均匀,但在屏幕上较稳定,边界明显.
3 海冰雷达图像识别综合方法
根据上述海冰在生存期间所具有的不同类型特征、以及海冰反射雷达波的特点,针对冰山、冰块、小块流冰的雷达图像,运用雷达回波处理理论知识分析,探索综合使用雷达扩展功能解决雷达图像中正确发现、识别海冰回波的方法[7-10].
3.1 使用ECHO STRETCH和TRAILS功能识别冰山回波
由于残碎冰山在水面上的体积较小,雷达正常观测较难发现该回波,但是雷达探测不到的残碎冰山在水面下体积巨大,所以残碎冰山对船舶航行是一个很大的安全隐患.针对残碎冰山的特点,可以使用雷达的ES回波拉伸功能,放大目标图像.ES有3种设置,ES1对远距离的回波在方位(横向)上进行放大;ES2在距离方向上进行放大;ES3在方位及距离上均进行放大.在对雷达图像进行放大之后,再使用TRAILS尾迹功能,如图1所示,尾迹功能通常是用来观测目标运动状况的,在此既可以估算冰山的漂移方向,还可以使点状小回波扩大成面状大回波,增加发现残碎冰山的概率.
因为残碎冰山的区域很大,主要是随风漂流、也受潮流和海流的影响,在北半球,其移动方向约在下风侧偏右30°~40°之间,所以可以进一步使用真尾迹功能得出回波的移动方向(图1使用EBL OFFSET将其标出),结合水域的风流压差方向来对比判断识别残碎冰山的雷达回波.
如果船舶所在区域的罗经可以使用的话,很容易根据本船的船首向和航迹向判断出风流压差的方向,但是在极地航行,由于纬度太高,陀螺罗经失去指向作用,地磁水平分力减小导致磁罗经指向能力减弱.在罗经无法使用的情况下使用风速风向仪、海流计依然可以得到风流压差的方向,见图1.
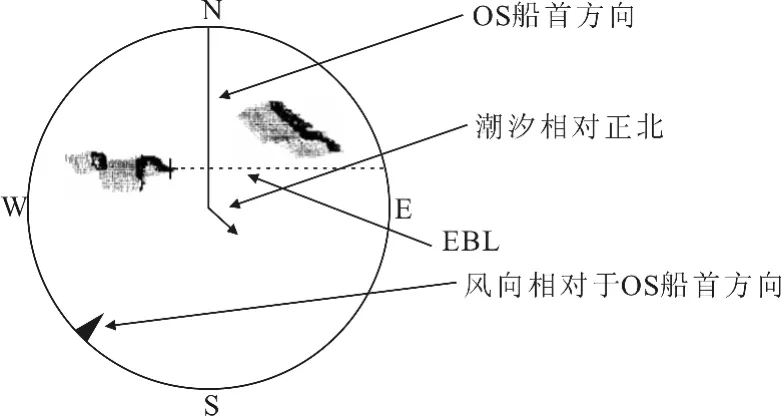
图1 风况、潮汐及回波尾迹比对图
3.2 使用雨雪干扰抑制(FTC)识别冰面回波
雨雪反射雷达回波产生干扰,在雷达中为了抑制雨雪干扰回波,设置有雨雪干扰抑制(FTC)功能,其信号处理的工作原理是针对目标回波,有比较明显边缘,从无到有,变化陡峭;雨雪回波变化平缓、无明显边缘的特征采用微分电路,在边界处产生尖脉冲输出,而平缓处信号削弱的技术抑制雨雪杂波、显示目标回波,见图2.
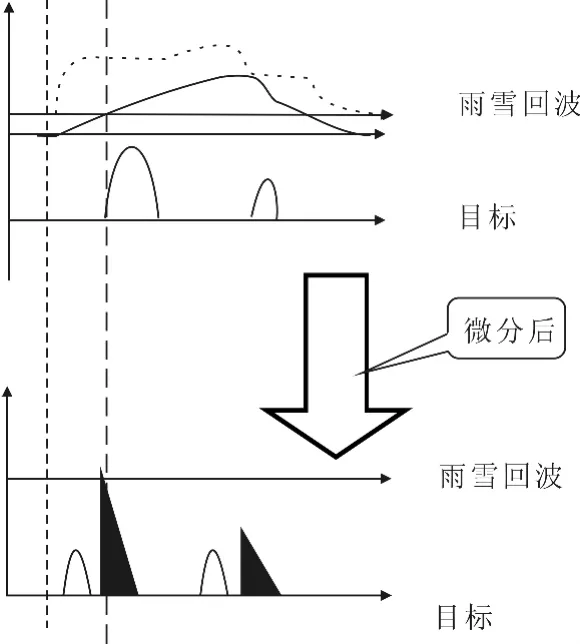
图2 FTC处理雷达回波原理图
对于平整的大面积冰面,因为能够看到冰与海水交界线的边界回波,所以在晴天通过适当调整使用“FTC”旋钮,适当减小“增益”旋钮有望发现大面积平整冰面的边界范围回波,通过改变“量程”旋钮,在雷达屏幕上冰面边界回波形成的封闭曲线图形形状不变、大小变化的特点加以识别.
而对于不平整的冰面因其回波在屏幕上较稳定,边界明显,所以使用“FTC”结合“增益”旋钮更加容易识别冰面回波.
3.3 使用ECHO AVERAGE,WIPER功能识别小块流冰回波
ECHO AVERAGE(回波平均)使用“扫描到扫描”(scan-to-scan)信号相关技术,该技术依据的是每个目标相对地面的真运动.天线每旋转一周,来自稳定目标(例如海冰)的回波将显示在屏幕的同一位置.另一方面,不稳定的回波(例如海浪杂波)则会随机显示在任意位置.为了将稳定的目标回波与海浪回波区分开来,回波会平均分布在连续的图像帧上.分布在连续帧上的稳固回波会以正常强度显示,而海浪杂波则会在连续扫描中平均分布,并且亮度降低,因此应该能区分真实海冰目标回波和海浪杂波.
对于小块流冰和在平静海面上高度小于0.3m的冰块雷达图像,采用通常的雷达观测方法较难以被识别发现,有风浪时,海浪干扰回波与冰块的回波也极不易辨别.如果使用回波平均功能可以有效抑制随机回波(例如海浪杂波)并显示静止(低速)的小目标(例如流冰等).但在探测相对地面高速运动的小目标方面,回波平均处理并不那么有效.
要想正确使用回波平均功能识别小块流冰,建议首先使用A/C SEA控制按钮抑制海浪杂波,然后执行以下ECHO AVERAGE操作.
1)ECHO AVERAGE1 从海浪干扰中区别目标,减小不稳定的回波亮度.
2)ECHO AVERAGE2 区分出小的固定目标,如流冰.
3)ECHO AVERAGE3 稳定显示远距离回波.
为了更好地从海浪杂波中分辨出小块流冰回波,在使用ECHO AVERAGE功能时可以和WIPER(擦除器)功能配合使用,WIPER的信号处理原理是用信号乘以擦除系数,信号幅度渐渐减小.信号幅度越小,擦除系数就越小,因此弱信号要比强信号更快地消失,如图3.
擦除特性可以自动地改变弱信号的显示强度,以有利于图像的观测.因此雷达上的擦除器功能可以自动抑制微弱信号(噪讯、海浪杂波、雨滴杂波等等)以及多余信号(例如雷达干扰信号)的亮度以实现清除画面上多余的回波.它的观测效果取决于使用的擦除器设置和是否打开或关闭平均功能,见表1.

图3 WIPER的信号处理原理图

表1 擦除器设置和平均功能关系表
1)状况A 减少多余的微弱回波(例如噪讯、海浪杂波和雨滴杂波)亮度以清除画面.擦除器设置“1”和“2”之间的区别在于“2”的亮度下降更缓慢.
2)状况B 打开擦除器功能时,回波平均自动开启,可以通过回波平均的开关迅速查看画面如何受到影响,如图4.

图4 回波平均off和on状态比较图
4 结束语
本文针对大面积冰山的移动特点,采用回波尾迹与风流压差比对的方法进行识别;冰面与海水边界明显的特征,使用FTC微分处理后辨识;流冰被海水淹没的现象利用相关技术和擦除技术加以甄别,通过雷达信号处理的理论研究得出的结论将运用到今后的极地航行中,接受实践的检验,并进一步的修改完善.
[1]郭 禹.航海学[M].大连:大连海事大学出版社,2011.
[2]王世远.航海雷达与ARPA[M].大连:大连海事大学出版社,1998.
[3]郑全安,张 东,潘家祎.海冰厚度的微波辐射遥感模式研究[J].海洋学报,1992(5):62-68.
[4]纪永刚.基于微波图像的辽东湾海冰典型要素信息提取[D].北京:中国科学院研究生院,2006.
[5]赵建华,王 磊,李 涛.海上目标雷达回波图像识别系统[J].兵工自动化,2012(1):61-65.
[6]席永涛,耿鹤军.船舶极地航行及操纵方法探讨[J].航海技术,2009(6):2-5.
[7]郑 尧.电子海图与雷达图像的融合显示[J].舰船科学技术,2015,37(3):181-184.
[8]孙鹤泉,李春花,张志刚.基于遥感图像分析的极区海冰漂移研究[J].海洋技术学报,2015,34(1):10-14.
[9]于 耀,石春燕.雷达显示技术发展[J].雷达与对抗,2015,34(1):42-44.
[10]罗素云,谭 箭.AIS与雷达目标航迹相关算法[J].武汉理工大学学报:交通科学与工程版,2003,27(1):112-115.