骨科机器人导航定位系统的应用方法
2015-04-13曾田勇四川省自贡市第四人民医院手术室自贡643000
曾田勇 四川省自贡市第四人民医院手术室 (自贡 643000)
股骨颈骨折是好发于老年人的下肢骨折,极易发生骨折不愈合及股骨头坏死[1]。临床上大多数病人通过牵引和闭合复位内固定手术能够达到骨性愈合。伴随科学技术的迅猛发展,外科手术进入由生物学、信息学、物理学相互融合的生物智能微创时代,将影像学、信息科学、机器人技术、遥控技术等高新技术组合的计算机辅助骨科手术系统(CAOS)应运而生,使手术更微创、更精确、更安全、痛苦更少、恢复更快,显著提高了创伤骨科治疗效果,满足了广大患者及医生对手术安全性和有效性的要求[2]。我院于2013 年7 月引进北京天智航骨科机器人导航定位辅助微创手术系统,临床应用效果满意,现介绍如下:
1.资料与方法
1.1 临床资料:2013 年7 月至2014 年10 月共实施骨科机器人辅助微创手术23 例,其中男性10例,女性13 例,年龄28~82 岁,平均年龄58.9 岁。全部手术均为股骨颈骨折患者。
1.2 术前准备
1.2.1 术前访视:全面了解患者基本信息和各项术前准备情况,做好整体评估。股骨颈骨折的病人长期卧床,活动度减少,可能会有肢体畸形、褥疮、肺部感染等并发症的发生[3]。通过访视,及时发现问题,积极采取补救或应对措施,减轻患者负担,减少医患矛盾,提高满意度;主动与患者沟通,减轻患者忧虑与不安心理,以积极心态配合手术治疗。
1.2.2 特殊器械、物品准备:骨科机器人专用器械、空心钉内固定器械、骨科电钻、大力剪,高压灭菌备用;医用敷巾型号规格330cm×240cm、医用无菌保护套型号规格150cm×150cm、医用无菌保护套型号规格80cm×60cm。
1.2.3 仪器、设备准备:控制台——主控系统(如图1)、机器人——定位执行系统(如图2)、TC—6 智能导航手术平台(如图3)、德国西门子C 臂透视机、铅衣等。
1.2.4 牵引架的安装:运行智能手术平台,在语音导航功能实时提示引导下进行操作。标准手术床体时,首先把床升至足够高,将全X 光透视床体组件推车置于床尾节(第五节)下的合适位置,连续按下牵引模式键,语音提示安装脱离位置,卸下床板显露出牵引架对接孔;然后按牵引模式键,提示牵引模式状态,把牵引组件移至到位,将连接座与手术床对接孔对合,拧紧旋钮提示牵引架安装完成,升高床体移走推车;最后依次将足托、会阴部立柱挡、固定杆等附件对位安装,妥善固定肢体与支架,避免左右摆动。
1.3 术中配合
1.3.1 静脉通道:巡回护士选择在患者健侧上肢建立静脉通道,配合麻醉医生做好全身麻醉。患侧上肢因体位要求不宜进行输液,需用凝胶垫作为衬垫妥善固定在拖手架上,或用束缚带向对侧尽量牵引,将上肢悬空于胸前,从而使患侧留有足够空间,方便手术医生操作。
1.3.2 体位摆放:全麻插管以后,巡回护士、手术医生与麻醉医生共同协助把患者移至牵引架连接座处,臀部放在会阴支架上,髋部略向患侧床缘外移,并注意保持骨盆处于水平位置;会阴部用立柱挡住,两足妥善固定在牵引架足托上,双下肢水平放置并外展,或是健侧下肢抬高屈髋屈膝外展于固定架上;患侧上肢固定在拖手架上。(图4)

图1. 主控系统

图2. 定位执行系统

图3. 智能导航手术平台
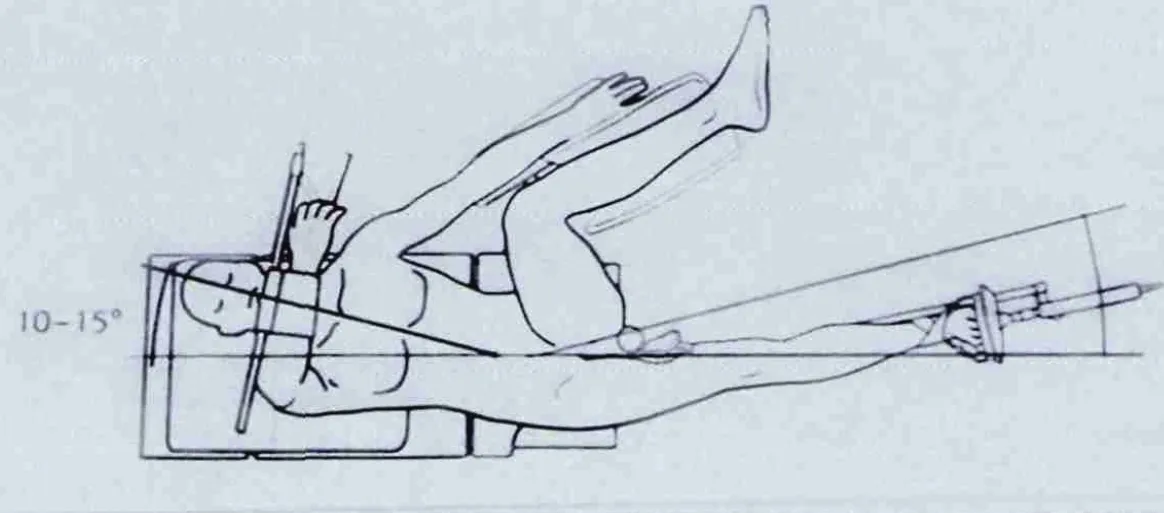
图4.
1.3.3 骨折复位:手术医生旋转牵引器手柄缓慢牵引患肢断裂处复位,牵引力不可过大、过猛,待患肢原长恢复后行内旋,使骨折前成角消失[4],术中C 臂实时透视。
1.3.4 消毒铺巾:洗手护士配合手术医生常规消毒铺巾;粘贴悬挂医用敷巾于专用挂钩上,形成挂帘式的无菌操作面;运用150cm×150cm 无菌保护套,将机器人定位执行系统接触面全部覆盖保护,移至患肢髂嵴外缘备用;C 臂透视机置于患者两腿之间,x 线球管端用80cm×60cm 无菌保护套完整包套。
1.3.5 手术配合:通过信号传输线将机器人导航的主控系统、定位执行系统和C 臂透视机连接;根据患肢左、右侧,安装与之匹配的定位标尺,运行机器人系统,校验标尺。采集正位、侧位透视图像,拾取标记点,绘制轮廓线,规划手术路径,确定手术路线,启动定位系统程序。随着“嘟嘟嘟”提示音后,机器人第一次运动至导芯置入位置,主刀医生安装导向套筒;按照套筒指示术区位置切开表皮,钝性分离切口深处软组织,在导向筒内插入破筋膜导针直至骨面;然后打入导针,通过透视验证导针路径,确认后置入导针。退出导向套筒,控制定位执行系统运动至其他导针位置,依照前述操作置入第二三枚导针。
2.结果
23 例手术患者术后拍片显示,均达到骨折解剖复位。骨科机器人手术定位精确,固定复位可靠,操作安全,明显减少C 臂照射次数和时间,手术效果满意。但系统操作复杂、精度要求高,且设备价格昂贵,医务人员使用、维护及保养难度大。
3.体会
3.1 操作精准,安全可靠。闭合复位内固定手术中,有效的牵引和准确的复位是手术成功的关键[5]。机器人主控系统通过参考术中手术部位的正、侧位X 光片,仿真手术路径,设计植入物的位置、数目,螺钉的长度及角度,建立股骨颈骨折经皮空心钉内固定的有限元模型;手术医生在定位执行系统的引导下逐步完成操作,使手术更精确、固定更稳固、操作更安全。克服了由于人手操作的不稳定性使得医生很难保证每一颗螺钉都处于最佳位置的缺陷[6]。
3.2 树立观念,全程无菌。无菌技术是手术室护理工作的核心和基础,是手术成功的关键[7]。手术器械及医疗用品必须一人一用一灭菌,严格监测灭菌效果,并规范储存、使用无菌物品。医护人员严格执行手卫生规范,遵循无菌技术操作原则;正确的皮肤准备和消毒,尤其是切口距离会阴部较近,必须加强对会阴部、肛门部无菌保护。悬挂医用敷巾时动作规范严谨,粘贴牢固形成严密有效的无菌面,C 形臂透视机及机器人定位执行系统用无菌保护套覆盖,将无菌管理做到极致。
3.3 皮肤保护,避免损伤。局部组织由于长期受压、血液循环障碍、组织营养供给受阻,会导致组织细胞缺血、缺氧而发生潮红、肿胀、甚至溃烂、坏死。体位摆放时,臀部及会阴部加凝胶垫(可透过X 光)予以保护,保持床单元平整,防止压伤;尤其是老年人皮肤松弛者;足部用棉垫包裹,包扎时力度适宜;加强暴露部位的皮肤保护,避免因仪器设备来回移动导致皮肤擦刮伤。
3.4 细节管理,加强防护。体位摆放及患肢牵引复位时,动作要轻柔,逐步缓慢牵引,不要过度旋转,预防神经肌肉被拉伤。同时,为减少对C 臂透视机及定位执行系统使用时的影响,需将患侧上肢悬吊放置,且悬吊的手臂与身体垂直不要超过90˚,固定带不可太松或太紧,牵拉力不能太大,以避免臂丛神经的损伤。
3.5 术中保暖,预防感染。低体温可导致氧摄入降低,损害中性粒细胞的杀菌能力,降低胶原蛋白的沉积,导致伤口愈合延迟、术后复苏时间延长、肺部感染等。手术室温度控制在22~25˚C;术前30min 预热电热毯,最好备恒温毯;采用加温输液器输注液体;双下肢用带脚型棉裤腿包裹,健侧穿至大腿根部,患侧至膝关节部;身体部位用被盖遮盖,尽量减少肢体暴露。
3.6 注重隐私,优化服务。术中搬运病人、导尿、摆放体位、充分暴露手术野,均可能暴露患者的敏感部位,尤其是远程诊疗和手术示教时,给人造成视觉不适感,也使患者感觉不被尊重感或羞辱感,产生心理压力和伤害。因此,要求医务人员恪守职业操守,树立隐私保护意识,实施护理伦理干预,做好隐私保护,以尊重患者人格尊严[8]。
3.7 职业防护,维护健康。传统复位操作过程中,医生需要不断地进行X 线照射,以确保复位的正确性[9],患者及医护人员长时间暴露在射线下,对人体损害较大,而骨科机器人定位精准,使得照射次数明显减少,极大地缩短照射时间,降低射线对医患双方的伤害[10]。手术过程中,医患双方均使用铅制品,做好自我保护,维护身体健康。
3.8 重视培训,强化能力。手术室护士必须具备全面扎实的医学知识技能:不仅要有丰富的临床经验、专业医学知识和技巧,还应掌握各种先进仪器设备的操作方法。骨科机器人是新技术,其价格昂贵,且仪器精密,操作复杂。因此,必须加强医务人员培训,掌握仪器原理,规范手术操作,以提高手术配合质量,并设专人进行日常管理、维护及保养,保持其良好性能。
3.9 远程诊疗,资源共享。经验丰富的专家往往是稀缺资源,通过该系统的实时视频信号传输,专家能够清晰看到前端手术室全景和手术的细节,并能与手术室人员进行实时语音对讲,以实现对前端手术室医护人员进行远程手术指导。
3.10 手术示教,实时讨论。该套手术示教系统通过手术直播示教,使观摩学习人员在会议室、示教室和办公室等场所就能观看手术现场的实况,示教医生实时对手术过程进行讲解,同时能听到观摩人员所提出的疑问,及时解答,达到教学互动的功能,有效保证了手术间的秩序和洁净度[11]。
[1] 高想,孙福荣,葛广勇,等,切开与闭合复位治疗股骨颈骨折的疗效比较[J],实用骨科杂志,2008,14(5):265~267.
[2] 王满宜,王军强,计算机辅助导航骨科手术及医用机器人技术在创伤骨科的应用[J],中华创伤骨科杂志,2005,7(11):1004-1009.
[3] 丑克,陈先礼,老年股骨颈骨折人工髋关节置换术的临床研究[J].湖南中医药大学学报,2010,30(6):11-12.
[4] 邱卫华,罗春强,早期闭合复位内固定治疗老年股骨颈骨折76 例[J],海南医学,2010,21(5):78~79
[5] 管四炎,胡涌亮,王国庆,等,闭合复位 PFNA 内固定治疗老年不稳定股骨粗隆间骨折[J],中国骨与关节损伤杂志,2013,28(5):69-70.
[6] 赵春鹏,王军强,王豫,等,双平面骨科机器人系统辅助股骨颈骨折空心螺钉内固定术的实验研究,中华创伤骨科杂志,2006,8(1):51-55.
[7] 齐弘,张华英,手术室无菌技术与感染控制[J],工企医刊,2011,24(1):78,82.
[8] 莫兰,郭玲,单艳,优质护理服务过程中保护患者隐私的思考[J],中国医学伦理学,2013,26(4):496~497.
[9] Wolinsky PR,McCary E,Shyr Y,et al.Reamed intramedullary nailing of the femur:551 eases[J],Journal of Trauma-Injury Infection and Cntical Care,1999,46(3):392.
[10] 韩巍,刘文勇,林鸿,等,机器人辅助股骨干骨折复位的性能评价,中国实验诊断学,2012,16(6):951~954.
[11] 吴桂萍,张东红,洁净手术室管理方法[J],中国消毒学杂志,2012,29(9):812~813.
