插电式四驱混合动力轿车控制策略研究
2015-04-13邱利宏钱立军程伟
邱利宏+钱立军+程伟

摘 要:根据插电式四驱混合动力轿车在各种工况下的工作模式,确定了各个动力部件的转矩分配,以此为依据制定了此混合动力轿车基于逻辑门限值的控制策略,并在有限状态机Stateflow中搭建了控制策略的核心状态流图,然后使用Cruise进行了仿真并对仿真结果进行了评价。仿真结果表明,汽车的动力性以及经济性都达到了设计指标要求,在NEDC下验证时,不论是在高电量区还是在低电量区,各动力部件均按照控制策略来工作,并且实现了各种工作模式的转换,控制策略有效而可行。
关键词:插电式四驱;混合动力汽车;控制策略;有限状态机;仿真
中图分类号:U469.72文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.01.10
插电式四驱混合动力汽车不仅和传统四驱汽车一样具备较高的操纵性、通过性和稳定性[1],而且在适合的条件下可以作为纯电动汽车使用,兼具纯电动汽车、串联式混合动力汽车以及并联式混合动力汽车的优点,在能源日益短缺以及节能减排得到大力倡导的今天越来越受到市场的青睐[2]。
本文研究一款插电式四驱混合动力轿车,详细分析了这款轿车在各种条件下的工作模式以及各个工作模式的跳转条件,在有限状态机Stateflow中搭建了状态流图,并在Matlab/Simulink中搭建了基于逻辑门限值的控制策略,然后利用Cruise仿真软件对其动力性和经济性进行了仿真,最后对仿真结果进行了评价。
1 插电式四驱混合动力轿车基本结构
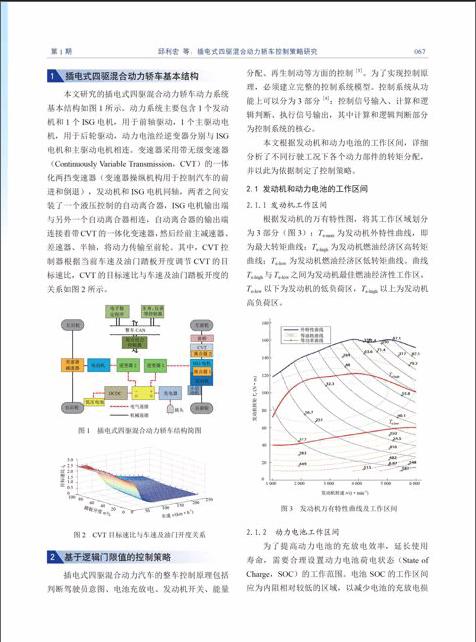
本文研究的插电式四驱混合动力轿车动力系统基本结构如图1所示。动力系统主要包含1个发动机和1个ISG电机,用于前轴驱动,1个主驱动电机,用于后轮驱动,动力电池经逆变器分别与ISG电机和主驱动电机相连。变速器采用带无级变速器(Continuously Variable Transmission,CVT)的一体化两挡变速器(变速器操纵机构用于控制汽车的前进和倒退),发动机和ISG电机同轴,两者之间安装了一个液压控制的自动离合器,ISG电机输出端与另外一个自动离合器相连,自动离合器的输出端连接着带CVT的一体化变速器,然后经前主减速器、差速器、半轴,将动力传输至前轮。其中,CVT控制器根据当前车速及油门踏板开度调节CVT的目标速比,CVT的目标速比与车速及油门踏板开度的关系如图2所示。
2 基于逻辑门限值的控制策略
插电式四驱混合动力汽车的整车控制原理包括判断驾驶员意图、电池充放电、发动机开关、能量分配、再生制动等方面的控制[3]。为了实现控制原理,必须建立完整的控制系统模型。控制系统从功能上可以分为3部分[4]:控制信号输入、计算和逻辑判断、执行信号输出,其中计算和逻辑判断部分为控制系统的核心。
本文根据发动机和动力电池的工作区间,详细分析了不同行驶工况下各个动力部件的转矩分配,并以此为依据制定了控制策略。
2.1 发动机和动力电池的工作区间
2.1.1 发动机工作区间
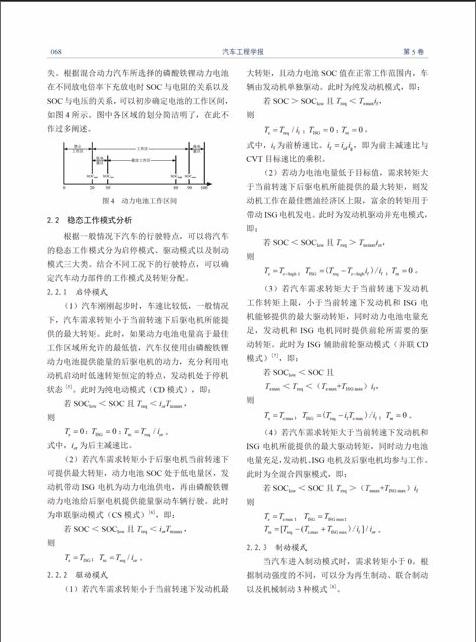
根据发动机的万有特性图,将其工作区域划分为3部分(图3):Te-max为发动机外特性曲线,即为最大转矩曲线;Te-high为发动机燃油经济区高转矩曲线;Te-low 为发动机燃油经济区低转矩曲线。曲线Te-high与Te-low之间为发动机最佳燃油经济性工作区,Te-low以下为发动机的低负荷区,Te-high以上为发动机高负荷区。
2.1.2 动力电池工作区间
为了提高动力电池的充放电效率,延长使用寿命,需要合理设置动力电池荷电状态(State of Charge,SOC)的工作范围。电池 SOC的工作区间应为内阻相对较低的区域,以减少电池的充放电损失。根据混合动力汽车所选择的磷酸铁锂动力电池在不同放电倍率下充放电时SOC与电阻的关系以及SOC与电压的关系,可以初步确定电池的工作区间,如图4所示。图中各区域的划分简洁明了,在此不作过多阐述。
2.2 稳态工作模式分析
根据一般情况下汽车的行驶特点,可以将汽车的稳态工作模式分为启停模式、驱动模式以及制动模式三大类。结合不同工况下的行驶特点,可以确定汽车动力部件的工作模式及转矩分配。
2.2.1 启停模式
(1)汽车刚刚起步时,车速比较低,一般情况下,汽车需求转矩小于当前转速下后驱电机所能提供的最大转矩。此时,如果动力电池电量高于最佳工作区域所允许的最低值,汽车仅使用由磷酸铁锂动力电池提供能量的后驱电机的动力,充分利用电动机启动时低速转矩恒定的特点,发动机处于停机状态[5]。此时为纯电动模式(CD模式),即:
若 SOClow 则 。 式中,ior为后主减速比。 (2)若汽车需求转矩小于后驱电机当前转速下可提供最大转矩,动力电池 SOC处于低电量区,发动机带动ISG 电机为动力电池供电,再由磷酸铁锂动力电池给后驱电机提供能量驱动车辆行驶。此时为串联驱动模式(CS模式)[6],即: 若SOC 则 。 2.2.2 驱动模式 (1)若汽车需求转矩小于当前转速下发动机最大转矩,且动力电池 SOC 值在正常工作范围内,车辆由发动机单独驱动。此时为纯发动机模式,即: 若SOC>SOClow且 Treq 则 。 式中,if为前桥速比。,即为前主减速比与CVT目标速比的乘积。 (2)若动力电池电量低于目标值,需求转矩大于当前转速下后驱电机所能提供的最大转矩,则发动机工作在最佳燃油经济区上限,富余的转矩用于带动ISG电机发电。此时为发动机驱动并充电模式,即:
若SOC
则
。
(3)若汽车需求转矩大于当前转速下发动机工作转矩上限,小于当前转速下发动机和 ISG 电机能够提供的最大驱动转矩,同时动力电池电量充足,发动机和 ISG 电机同时提供前轮所需要的驱动转矩。此时为 ISG 辅助前轮驱动模式(并联CD模式)[7],即:
若SOClow Temax 则 。 (4)若汽车需求转矩大于当前转速下发动机和ISG 电机所能提供的最大驱动转矩,同时动力电池电量充足,发动机、ISG 电机及后驱电机均参与工作。此时为全混合四驱模式,即: 若SOClow 则 。 2.2.3 制动模式 当汽车进入制动模式时,需求转矩小于0。根据制动强度的不同,可以分为再生制动、联合制动以及机械制动3种模式[8]。 (1)若驾驶员制动需求转矩小于当前转速下后驱电机以及ISG电机所能提供的最大再生制动转矩之和,SOC小于允许的最大值并且非紧急制动时(加速踏板的变化率小于设定值),ISG电机和后驱电机均作为发电机使用,提供再生制动力矩。ISG电机和后驱电机所提供的再生制动转矩的大小按照前后轴的轴荷大小的比例进行分配。此时为再生制动模式,即: 若SOC 且a (a为制动踏板行程的变化率;ac为制动踏板行程变化率的设定值,在本文中取值为3) 则 。 (2)若驾驶员制动需求转矩大于当前转速下后驱电机以及ISG所能提供的最大再生制动转矩之和,SOC小于允许的最大值并且非紧急制动时,此时进入联合制动模式,后驱电机以及ISG电机提供当前转速下各自最大的再生制动转矩,额外转矩由机械制动进行补充,即: 若SOC 且a 则 。 式中,Tb为机械制动力矩。 (3)若驾驶员踩制动踏板或松油门时车速很低,此时再生制动效果不明显,或者出现紧急情况制动时,只允许机械制动,即: 若v 则 。 2.3 控制策略的建模 根据前面所陈述的四驱混合动力汽车具体的工作模式可知,本文所研究的四驱混合动力轿车具备纯电动、串联驱动、纯发动机、发动机驱动并发电、ISG 辅助前轮驱动、四轮驱动、再生制动、联合制动和机械制动等9种D挡稳态工作运行模式[9]。D挡运行模式判别图如图5所示。 根据上一节内容,可以在Simulink里搭建基于逻辑门限值的控制策略,可以用Simulink中基于有限状态机的Stateflow的子模块搭建各种工作模式相互跳转的控制策略核心部件,其中,最主要的驱动模式下的状态流图如图6所示。 3 仿真结果及其评价 本文研究的插电式四驱混合动力轿车整车及动力部件的基本参数见表1。 3.1 仿真结果 将搭建好的控制策略编译成DLL文件之后,导入到搭建好整车模型的Cruise仿真软件里面运行仿真,仿真结果以及设计指标见表2。由表2可知,仿真结果得到的插电式四驱混合动力轿车的动力性和经济性都是满足要求的,因此,可以初步判定动力部件的选型以及控制策略的建模是合理的。 3.2 仿真结果评价 本文选取NEDC循环工况对汽车各个动力部件的工作情况进行仿真结果的评价,进而验证控制策略的合理性[10]。根据动力电池高电量和低电量两种情况,分别取SOC初值为90%和20%进行仿真,可以得到图7和图8所示的两组仿真结果。 本文所搭建的控制策略主要是基于转矩分配的能量管理策略,从理论上讲,汽车运行所需要的最大转矩是出现在每一个加速段的终点或者每一个减速段的终点(减速段取绝对值)。在NEDC循环工况下的每一个加速段,由于汽车在加速,车辆起步之后(起步时需求的瞬时转矩也比较大,但是后驱电机可以完成单独启动),如果不考虑车轮滚动半径的影响,随着车速的增加,汽车的滚动阻力基本保持不变,空气阻力以与速度平方成正比的关系不断增大,而在同一个加速段,汽车的加速度是基本保持不变的,所以汽车的需求转矩随着车速的升高而增大。在汽车刚起步后的一段时间之内,由于那一段加速度比较大,所以需求转矩也比较大,但是后驱电机在当前转速下的转矩范围可以满足汽车行驶的转矩需求。因此,汽车在这一段内主要依靠后驱电机驱动。当SOC值比较高的时候,汽车处于后驱电机单独驱动的纯电动模式,当SOC值达到动力电池的工作下限(本文取20%)的时候,汽车主要处于串联驱动模式,发动机工作在高效区,带动ISG电机发电给后驱电机供电,富余的能量以电能的形式存储于动力电池之中。 当汽车的速度上升到一定的数值之后,汽车行驶的需求转矩可能会超过当前转速下后驱电机的最大转矩(后驱电机基速是2 500 r/min,所以当速度达到35 km/h左右时就进入了恒功率区),特别是NEDC工况的EUDC(European Urban Driving Cycle)循环下的那几个加速段,汽车的速度非常高,后驱电机在当前转速的最大转矩可能已经无法满足汽车运行的转矩需求。经过计算,在前4个ECE(Economic Commission for Europe)循环下,后驱电机的转矩范围可以满足汽车行驶的转矩需求。如果电池电量充足,则由后驱电机单独驱动,如果电池电量不足,则发动机工作在最佳燃油消耗区上限,发动机带动ISG电机发电,一部分用于提供后驱电机所需的电能,富余的能量用于给动力电池充电。EUDC循环的第3个加速段,汽车需要由发动机单独驱动,在最后一个加速段,需要ISG电机与发动机共同驱动。
在每一个NEDC工况的匀速段,汽车的需求转矩主要是用来克服空气阻力和滚动阻力,此时没有加速阻力。经过计算,本文所选择的后驱电机的转矩范围满足整个NEDC循环下匀速段汽车行驶的转矩需求。因此,在所有的匀速段,如果动力电池电量充足,汽车即处于后驱电机单独驱动的纯电动模式;如果动力电池的电量达到最佳工作区域的最低值,汽车即处于串联驱动模式。
对于NEDC工况下的每一个减速段,经过计算,如果不是紧急制动,除了在最后一个减速段需要机械制动之外,后驱电机与ISG电机在当前的转速下所能提供的最大再生制动转矩之和足以满足汽车的制动转矩需求。因此除去最后一个减速段之外,如果SOC低于最大值,车速高于设定的低值以及非紧急制动的情况下,汽车在减速段处于再生制动模式。当车速低于设定的低值或者SOC过高或者紧急制动时,汽车处于机械制动模式。
综上所述,从理论上分析,本文所研究的插电式四驱混合动力轿车在NEDC工况下可能出现6种工作模式,分别为后驱电机单独驱动的纯电动模式、发动机单独驱动模式、串联驱动模式、ISG辅助前轮驱动模式、再生制动模式以及机械制动模式,不会出现发动机驱动并发电模式、四轮驱动模式以及联合制动模式。
分析图7的仿真结果,由图7(a)可知,汽车在前四个ECE循环下,电荷在不断减少,可知汽车应该是处于后驱电机单独驱动的纯电动模式,而到了最后一个EUDC循环,有一段 SOC仍然在减小,从前面的理论分析可知,这一段汽车处于ISG辅助前轮驱动模式,ISG电机消耗电能。在SOC整体降低的大背景下,在某些时间段,SOC出现了上升,这是再生制动的结果。再分析图7(b)、(c)、(d)可知,发动机、ISG电机以及后驱电机的工作点正好与SOC变化所反映出来的整车的工作模式相对应。后驱电机与ISG电机驱动的时候,转矩为正值,再生制动时,转矩为负值,发动机、ISG电机、后驱电机所提供的转矩之和正好是汽车需求的转矩。由此可知,动力电池电量高时,不管是从理论上还是仿真结果上看,汽车各动力部件都按照既定的控制策略来工作,汽车出现了纯电动模式、发动机单独驱动模式、ISG辅助前轮驱动模式、机械制动以及再生制动模式,这与理论分析是相吻合的,因此控制策略是合理的。
分析图8的仿真结果,由图8(a)可知,动力电池SOC在前一段处于上升阶段,因为设定的SOC低值为20%,所以取初值为20%的时候,汽车在前一段处于串联驱动模式。紧接着电池的SOC值开始下降,可知汽车又出现了ISG辅助前轮驱动模式,这个结果与理论分析吻合。电池SOC在不断变化的过程中,有些时间段出现SOC小幅度升高的现象,这是再生制动的结果。再结合图8(b)、(c)、(d)动力部件的工作情况也可以体现出与电池SOC变化反映出的工作模式相对应的结果。汽车在SOC初值比较低的一个NEDC循环内出现了串联驱动模式、发动机单独驱动模式、ISG辅助前轮驱动模式、再生制动模式以及机械制动模式,这与理论分析也是吻合的。
综合以上的理论分析与仿真结果分析可知,本文制定的控制策略是有效的、合理的。
4 结论
本文介绍了某款在研插电式四驱混合动力轿车的基本结构,详细介绍了其在各种工况下的工作模式以及各个工作模式之间的相互跳转,并且以此为依据搭建了基于逻辑门限值的控制策略。采用Simulink/Stateflow搭建控制策略的核心状态流图,并详细标明了各种状态之间的跳转条件。然后使用Cruise软件对此混合动力轿车的动力性能及经济性能进行了仿真。最后根据仿真得到的各主要动力部件的工作状态以及能量消耗,从理论上以及实际上对仿真结果进行了评价。仿真结果表明,本文研究的插电式四驱混合动力轿车不仅达到了动力性和经济性等各项指标的要求,而且在NEDC工况下仿真,主要动力部件是按照制定的控制策略来工作的,并且实现了各种工作模式的转换。因此,制定的控制策略是有效的、可行的。
参考文献(References):
李江. 全轮驱动混合动力汽车再生制动系统控制策略研究 [D]. 重庆:重庆大学,2008.Li Jiang. A Control Strategy Study on Regenerative Braking System of 4WD Electric Vehicle [D]. Chongqing:Chong-qing University,2008. (in Chinese)秦大同,叶心. ISG型中度混合动力汽车驱动工况控制策略优化 [J]. 机械工程学报,2010,46(12):86-92.Qin Datong,Ye Xin. Optimization of Control Strategy for Medium Hybrid Electric Vehicle with ISG at Drive Condition [J]. Chinese Journal of Mechanical Engineering,2011,46(12):86-92. (in Chinese)黄伟. 基于CVT的四轮驱动混合动力汽车传动控制策略研究 [D]. 长沙:湖南大学,2008.Huang Wei. A Study on Driveline Control Strategy of the Four-wheel Drive Hybrid Electric Vehicle Based on CVT [D]. Changsha:Hunan University, 2008. (in Chinese)王明,孙俊,王超. 双离合ISG混合动力汽车控制策略研究 [J]. 汽车工程学报,2013,3(1):22-27.Wang Ming,Sun Jun,Wang Chao. Control Strategy of ISG Hybrid Electric Vehicle with Dual Clutches [J]. Chinese Journal of Automotive Engineering,2013,3(1):22-27. (in Chinese)王帅锋. 插电式电动汽车的控制策略研究与仿真分析 [D]. 长春: 吉林大学, 2011. Wang Shuaifeng. Study on the Control Strategy and Simulation of Plug-in Electric Vehicle [D]. Changchun: Jilin University,2011. (in Chinese)马东兵. 四轮驱动混合动力汽车控制策略仿真与测试 [D]. 上海:上海交通大学,2013.Ma Dongbing. Simulation and Test on the Control Strategy for Four-Wheel Drive Hybrid Electric Vehicle [D]. Shang-hai:Shanghai Jiaotong University,2013. (in Chinese)周健. CFA6470E四驱混合电动汽车关键技术研究 [D]. 长沙:湖南大学,2007.Zhou Jian. The Key Technique Research of the 4WD Parallel-Series Hybrid Electric Vehicle of CAF6470E [D]. Changsha:Hunan University,2007. (in Chinese)李启迪. ISG轻度混合动力电动汽车控制策略的研究 [D]. 大连:大连理工大学,2006.Li Qidi. Study on the Control Strategy of ISG Systems for Mild Hybrid Electric Vehicle [D]. Dalian:Dalian University of Technology,2006. (in Chinese)莫愁,陈吉清,兰凤崇. 四驱混合动力汽车动力系统参数匹配与控制策略研究 [J]. 汽车工程学报,2013,3(3):199-204.Mo Chou,Chen Jiqing,Lan Fengchong. Study on the Powertrain Parameters Match and Control Strategies for a 4WD HEV [J]. Chinese Journal of Automotive Engi-neering,2013,3(3):199-204. (in Chinese)罗国鹏,罗禹贡,李克强. 基于最佳电能使用的插电式混合动力客车控制策略 [J]. 汽车工程,2012,34(6):475-490.Luo Guopeng,Luo Yugong,Li Keqiang. Control Strategy for Plug-in Hybrid Electric Bus Based on Optimal Electric Energy Use [J]. Automotive Engineering,2012,34(6):475-490. (in Chinese)
