E—ECHPS系统的电磁离合器设计及能量转换分析
2015-04-13江浩斌徐哲唐斌耿国庆
江浩斌 徐哲 唐斌 耿国庆

摘 要:为了降低重型车辆液压助力转向系统(Hydraulic Power Steering,HPS)能耗并改善高速工况转向路感,提出一种用电磁离合器控制转向泵的节能型转向系统——电控液压转向系统(Electromagnetic Clutch-Electronical Controlled Hydraulic Power Steering,E-ECHPS)。重点分析了由主、副电机及转差功率回收装置组成的电磁离合器的结构和工作原理,并对电磁离合器进行了功率流分析,发现E-ECHPS相对于HPS具有明显的节能性。运用Ansoft软件建立了某重型车辆E-ECHPS的电磁离合器主、副电机仿真模型,并设计了主电机的外电路和副电机的驱动电路,对典型车速转向和直行工况下的电磁离合器进行仿真分析。结果表明,在转向工况下,电磁离合器的输出转矩随车速增大而减小,符合助力特性要求 ;在直行工况下,主电机回收的转差功率大于副电机的输入功率。电磁离合器从助力特性和能量角度均满足E-ECHPS系统的工作要求。
关键词:重型车辆;电控液压转向系统;电磁离合器;节能;能量
中图分类号:U463.41文献标文献标识码:A文献标DOI:10.3969/j.issn.2095-1469.2015.01.07
近年来,作为长途公路客运和物流运输主力装备的重型车辆产销规模快速增长,重型车辆的安全、节能和环保方面的新技术研究日益受到重视。目前重型车辆普遍采用HPS,HPS中的转向泵由发动机直接驱动。在汽车行驶过程中,不管汽车是否需要转向,转向泵一直高速运转,消耗了很多不必要的能量。此外,HPS的助力特性一旦设定就不能随车速的变化而变化,难以兼顾低速时的转向轻便性与高速时的路感及操纵稳定性要求[1]。
本文采用电磁离合器(Electromagnetic Clutch)来控制转向泵转矩和转速,使其按车辆实际工况需要而变化,介绍了新型E-ECHPS的组成原理和转向泵转速-流量特性。借鉴混联式混合动力汽车中的驱动电机设计思想,设计了由主、副电机及转差功率回收装置组成的电磁离合器,分析了电磁离合器的结构和工作原理,根据电磁离合器的功率输入输出关系,分析了E-ECHPS的节能性。运用Ansoft软件对某重型车辆E-ECHPS电磁离合器的主、副电机进行建模,并设计了主电机的外电路和副电机的驱动电路,对典型车速下的转向工况和直行工况进行了仿真分析,得出了电磁离合器输出转矩的变化情况和电功率与损耗的转换情况。
1 E-ECHPS的系统组成与转向泵转速-流量
特性
1.1 E-ECHPS的基本组成
图1是本文介绍的采用电磁离合器控制转向泵转矩和转速的新型E-ECHPS系统的组成原理。E-ECHPS系统以传统HPS为基础,在发动机和转向泵之间安装电磁离合器,电磁离合器的输入端与发动机相连,输出端与转向泵相连,电子控制单元(Electronic Control Unit,ECU)根据车速、发动机转速、转向泵转速、转向盘输入转矩和转角信号计算电磁离合器的输入电流,以控制转向泵的转速和转矩,调节转向泵的输出流量,实现E-ECHPS助力特性随车速可变,同时减少转向泵的无效功耗。
1.2 E-ECHPS的转向泵转速-流量特性
图2是E-ECHPS转向泵的转速-流量特性,nmin是维持液压系统最小流量Qmin所对应的转向泵的最低转速,nmax是转向泵的最高转速(接近发动机的怠速,此时转向泵输出最大流量Qmax)。车辆行驶时,通过控制电磁离合器输入端与输出端的转速差,使转向泵的转速处于[nmin,nmax]范围内,转向泵的输出流量控制在[Qmin,Qmax]之间,转向泵内就不会产生溢流流量,从而使转向泵的能耗明显降低。
2 电磁离合器结构原理与性能分析
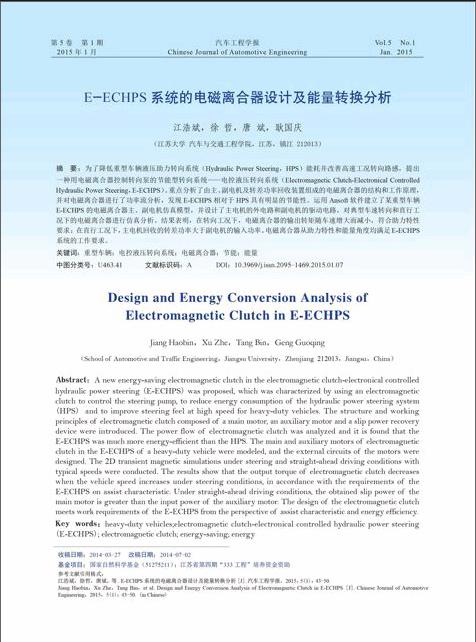
2.1 电磁离合器的结构组成和工作原理
图3是本文设计的电磁离合器基本结构组成,该结构借鉴了混联式混合动力汽车中的驱动电机设计思想[2]。电磁离合器包括主电机、副电机和外电路,主电机由内、外转子组成,副电机为直流永磁无刷电机,外电路由AC-DC逆变器、电池和控制器组成。主电机的外转子与发动机相连,主电机的内转子与副电机转子及转向泵输入轴连成一体,主电机和副电机都与外电路相接。在汽车正常转向工况下,驱动转向泵所需的转矩(即电磁离合器的输出转矩)大部分由主电机提供,少部分由副电机提供;在直行工况下,驱动转向泵的转矩主要由副电机提供,使转向泵处于最低稳定转速状态以维持液压系统的基本压力;在紧急转向工况以及转向阻力有较大波动时,副电机提供辅助转矩以保证转向泵的响应敏捷性和良好的助力跟随性,从而满足车辆转向操控的动态需求。外电路的作用是对主电机内、外转子的转差功率进行回收利用,并通过控制器对主、副电机的工作状态进行协调控制。采用分体式主、副电机结构,可以降低主电机的励磁电流,有利于整个结构的散热,提高转向系统的可靠性。
电磁离合器的工作原理是:当发动机带着主电机外转子旋转时,给主电机内转子的励磁线圈通电而形成主极磁场,外转子三相绕组感应产生三相交流电并形成电枢磁场,主极磁场和电枢磁场相互作用而带动内转子、副电机转子及转向泵一起旋转。由于转向泵的转速总是低于发动机怠速,发动机实际转速总是大于或等于怠速,所以车辆运行时主电机的内、外转子总是存在转速差,而主电机外转子上有三相绕组,因此,内、外转子的转差功率就产生三相交流电,经AC-DC逆变器转为直流电充入电池,实现能量的回收利用。外电路中的控制器根据实际工况要求,控制电池的输出电流以改变主电机的励磁电流和副电机的输入电压,从而实现转向泵转矩和转速的调节。
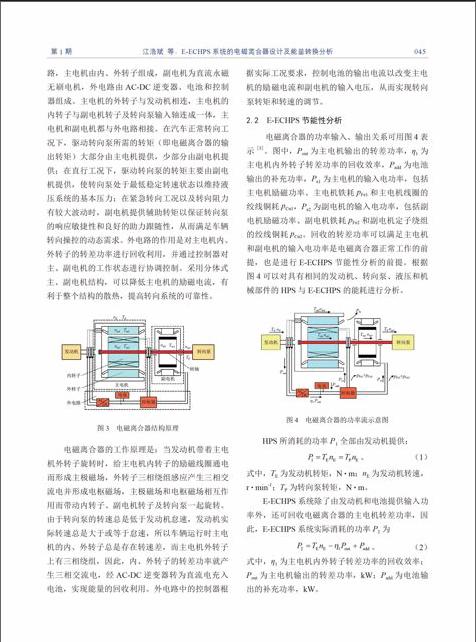
2.2 E-ECHPS节能性分析
电磁离合器的功率输入、输出关系可用图4表示[3]。图中,Pout为主电机输出的转差功率,η1为主电机内外转子转差功率的回收效率,Padd为电池输出的补充功率,Pe1为主电机的输入电功率,包括主电机励磁功率、主电机铁耗pFe1和主电机线圈的绞线铜耗pCu1,Pe2为副电机的输入电功率,包括副电机励磁功率、副电机铁耗pFe2和副电机定子绕组的绞线铜耗pCu2。回收的转差功率可以满足主电机和副电机的输入电功率是电磁离合器正常工作的前提,也是进行E-ECHPS节能性分析的前提。根据图4可以对具有相同的发动机、转向泵、液压和机械部件的HPS与E-ECHPS的能耗进行分析。
HPS所消耗的功率P1全部由发动机提供:
。
式中,TE为发动机转矩,N·m;nE为发动机转速,r·min-1;TP为转向泵转矩,N·m。
E-ECHPS系统除了由发动机和电池提供输入功率外,还可回收电磁离合器的主电机转差功率,因此,E-ECHPS系统实际消耗的功率P2为
。
式中,η1为主电机内外转子转差功率的回收效率;Pout为主电机输出的转差功率,kW;Padd为电池输出的补充功率,kW。
对比分析式(1)和式(2)可知:在转向工况下,由于E-ECHPS在短时间内需要一定的电池补充功率,同时回收的转差功率较少,所以E-ECHPS与HPS消耗的功率基本相当;在直行工况下,E-ECHPS不需要电池补充功率,回收的转差功率较多,所以E-ECHPS所消耗的功率明显小于HPS。由于车辆在实际运行过程中,80%以上的行驶里程都处于直行工况[4],所以E-ECHPS的总体能耗明显低于HPS。
3 电磁离合器建模
3.1 设计依据
本文基于某重型车辆HPS,设计了E-ECHPS中的电磁离合器。整车和转向泵的主要参数见表1。
3.2 主电机建模及外电路设计
运用Ansoft软件设计的主电机2D模型和外电路如图5和图6所示。
主电机的主要参数为:外转子外径Da=220 mm,
外转子三相绕组电阻Ra=0.097 3 Ω,外转子三相绕组漏电感L1σ=0.066 mH,外转子内径D1=140 mm,内转子励磁绕组电阻Rf=0.5 Ω,长度l=150 mm,极对数为3,内转子转动惯量J=13.6 g·m2。主电机外电路包括外转子上的三相绕组、三相整流电路、滤波电路和负载电阻,本文用负载电阻消耗的功率来模拟电池的回收功率。通过线圈LPhaseA、LPhaseB和LPhaseC可以把主电机的有限元模型与主电机负载电路连接起来[5]。
3.3 副电机建模及驱动电路设计
运用Ansoft所建立的副电机的2D模型如图7所示,副电机的驱动电路如图8所示。
副电机的主要参数为:定子外径Da=130 mm,定子电枢电阻Rs=0.116 Ω,定子漏电感L1σ=40 μH,定子内径D1=80 mm,长度l=50 mm,极对数为2,转子转动惯量J =1.8 g·m2。副电机的驱动电路是通过7个电压控制(简称压控)开关管和6对二极管对副电机三相绕组的输入电压进行控制[6]。
4 电磁离合器仿真分析
4.1 转向工况
车辆转向时,E-ECHPS的转向泵助力转矩TP应随车速变化而变化,由于转向泵助力转矩TP等于电磁离合器的输出转矩Te(即主、副电机的电磁转矩之和),故对5种代表性车速工况的电磁离合器输出转矩Te进行仿真,以验证E-ECHPS的助力特性是否符合要求。
根据表1中的参数,5种车速工况的仿真参数和结果列于表2中,v为车速,U2为副电机输入电压,If为主电机励磁电流。
由图9可知,随着车速提高,电磁离合器的输出转矩逐渐减小,符合E-ECHPS转向助力随车速变化的要求。表2中不同车速下的电磁离合器输出转矩Te仿真结果与转向泵助力转矩TP目标值基本一致,说明所建的电磁离合器仿真模型具有较高的精度,可实现不同车速下的助力特性。图9显示,随着车速逐渐增大,电磁离合器的输出转矩达到稳定值所需的时间(即响应时间)也逐渐增多,这是由初始转速差增大所导致的。显然,车速为80 km/h时电磁离合器的响应时间低于0.2 s,对转向系统的助力响应敏捷性影响不大。图9中输出转矩的波动是由于电磁离合器主电机三相绕组中存在高次谐波电动势,从而产生了谐波转矩。通过以下方法可以较好地消除或削弱谐波转矩:三相绕组采用星形联结和短距绕组,主电机采用斜槽来削弱谐波转矩[7]。
4.2 直行工况
直行工况下,E-ECHPS相对于HPS更节能,是基于电磁离合器回收的转差功率能满足主电机的损耗和副电机的输入电功率,主电机的励磁功率较小,可由电池输出的补充功率提供。本文利用Ansoft软件对40 km/h典型车速下直行工况的电磁离合器进行二维瞬态磁场仿真,来分析直行工况下电磁离合器的电功率和损耗。表3是3种典型车速下直行工况的仿真参数,表中nE为发动机转速,nP为转向泵转速,仿真时间设置为0.5 s,仿真过程中不考虑涡流损耗。
4.2.1 主电机仿真结果
三相绕组输出电压为相电压,电流表检测的电流为相电流。由图10可知,相电压有效值U为9.12 V,相电流有效值I为6.08 A。图11是三相绕组中A相绕组输出电压和电流在3个周期内的变化曲线,可求出相电压与相电流之间的相位差φ为6°。根据式(3),可求出主电机输出的转差功率Pout[8]:
。
图12是负载电阻电压和电流波形,从图中可以看出,经过三相整流电路后,负载电阻两端的电压和流过的电流均变为直流电压和直流电,且幅值波动很小,有利于电能的回收。
利用图12中的数据,可求出电压UR1为11.4 V,电流IR1为8.18 A,根据式(4)可求出消耗在负载电阻上的电能,即回收的转差功率PR1 [9]:
。
利用计算得到的主电机输出的转差功率Pout和回收的转差功率PR1,就可以求出转差功率的回收效率η1:
。
图13是主电机铁耗和线圈的绞线铜耗图。从图中可以看出铁耗较小,且明显小于铜耗,这是由于主电机内、外转子部分均采用薄硅钢片叠压而成,最大限度地降低了主电机的铁耗。利用图13中的数据可以求得铁耗pFe1为2.1 W,铜耗pCu1为10.2 W。
4.2.2 副电机仿真结果
图14是副电机A相电流波形,电流波形有波动,主要是由以下两方面的原因造成[10]:
(1)副电机定子齿槽引起的齿谐波电动势,工程中用定子斜槽可以有效地消除齿谐波电动势。
(2)假定副电机本身的气隙磁场为理想梯形波,而且反电动势和磁感应强度分布一致,由于副电机绕组存在电感,A相电流不可以突变,导致A相绕组电流只能近似地按照梯形波变化,因此无法保证A相电流波形为理想的梯形波。
根据图14中的数据,可以求出A相电流的均值IPhA=4.2 A,由设计依据可知,在40 km/h车速直行工况下,副电机的输入电压U2=18 V,再利用式(6)可求出副电机的输入电功率Pe2:
。
图15是副电机铁耗和铜耗曲线,从图中数据可以求出铁耗pFe2为2.3 W,铜耗pCu2为2.4 W。
4.2.3 三种典型车速下的仿真结果
由于10 km/h和80 km/h两种车速下直行工况的仿真方法与40 km/h车速下的相同,因此根据以上的仿真方法,可以求出这两种典型车速下的主要功耗,包括:主电机回收的转差功率、副电机输入电功率、主电机铁耗和铜耗、副电机铁耗和铜耗。求出的功耗列于表4中。
由表4可以看出,在3种车速下,主电机回收的转差功率η1Pout均大于铁耗和铜耗,副电机的输入电功率也均大于铁耗和铜耗。在10 km/h车速下,主电机输出的电功率(即回收的转差功率)略小于副电机的输入电功率,这是因为低速直行工况时,发动机转速较低,可回收的转差功率较小,此时电池输出的补充功率可以进行补偿;在40 km/h和80 km/h车速下,主电机输出的电功率均大于副电机的输入电功率,保证了整个电磁离合器在中高速直行工况下的正常运行。
5 结论
(1)在已知E-ECHPS系统组成方案和转向泵转速-流量特的基础上,设计了一种适用于E-ECHPS系统的电磁离合器。
(2)在分析电磁离合器结构和工作原理的基础上,对E-ECHPS系统的节能性进行了分析,运用Ansoft软件建立了电磁离合器的主、副电机模型,并设计了相应的电路。
(3)对5种典型车速转向工况下的电磁离合器进行了仿真和计算,表明所建立的电磁离合器模型精度较高,电磁离合器可满足E-ECHPS系统的助力要求并且可实现随车速可变的助力特性。
(4)对3种典型车速直行工况下的电磁离合器进行了仿真和计算,对比分析了主、副电机的电功率和损耗。仿真结果表明所设计的电磁离合器的合理性,也验证了E-ECHPS系统相对于HPS系统的节能性。
