一种变逻辑门限值的车辆稳定性控制策略研究*
2015-04-12李寿涛马用学郭鹏程宗长富LeeGordon
李寿涛,马用学,郭鹏程,宗长富,Lee Gordon
(1.吉林大学通信工程学院,长春 130022; 2.吉林大学,汽车仿真与控制国家重点实验室,长春 130022; 3.圣地亚哥州立大学电子与计算机工程系,加州 92182)
2015136
一种变逻辑门限值的车辆稳定性控制策略研究*
李寿涛,马用学,郭鹏程,宗长富,Lee Gordon
(1.吉林大学通信工程学院,长春 130022; 2.吉林大学,汽车仿真与控制国家重点实验室,长春 130022; 3.圣地亚哥州立大学电子与计算机工程系,加州 92182)
本文中提出一种变逻辑门限值的车辆稳定性控制策略,并重点对动态逻辑门限值的确定方法进行了深入的研究,以改善不同工况下车辆的稳定性。由于逻辑门限值受到行驶环境和运动状态的影响,因此利用模糊推理的方法分别确定横摆角速度偏差和质心侧偏角变化率的门限值;然后利用逻辑门限PI控制方法计算出附加横摆力矩;最后在电控液压制动(EHB)系统中实现了附加横摆力矩。仿真结果表明,当车辆失稳时,所提出的控制策略能及时对车辆进行稳定校正控制,提高了车辆行驶的安全性。
车辆稳定性;动态逻辑门限值;模糊控制器;电控液压制动系统
前言
随着智能车辆技术的不断发展,许多汽车厂商开发出防止汽车横摆、侧滑和侧倾的车辆稳定性控制系统,并得到商业化应用[1]。已投入使用的汽车稳定性控制的主动安全系统有ABS、TCS和ESP等[2]。另外还有属于线控系统的电控液压制动(EHB)系统和电子机械式制动(EMB)系统[3-4],它们在结构和性能上都优于传统的制动系统,但是距离市场化应用还需要一段时间。
到目前为止,已经有大量的学者对附加横摆力矩控制方法进行了研究。文献[5]中以横摆角速度偏差和质心侧偏角偏差分别作为PID控制器的输入量,再将两个PID控制器计算出的附加横摆力矩线性相加得到总的附加横摆力矩。文献[6]中以横摆角速度偏差和质心侧偏角偏差作为模糊控制器的两个输入量,然后利用模糊推理决策出附加横摆力矩。文献[7]中利用逻辑阈值和PID控制相结合的控制方法提高了整车的稳定性,通过逻辑阈值去调节PID控制器的参数,利用PID控制器获得横摆力矩。文献[8]和文献[9]中以线性2自由度车辆操纵特性模型为控制目标,采用线性二次型调节器(LQR)方法进行了车辆横摆力矩的决策。
为了改善不同工况下的车辆稳定性,提高车辆横摆稳定性控制的工况适应性,本文中提出了一种变逻辑门限值的车辆稳定性控制策略。首先利用模糊推理的方法分别确定横摆角速度偏差和质心侧偏角变化率的门限值,然后利用逻辑门限PI控制的方法得到附加横摆力矩,最后通过电控液压制动(EHB)系统实现附加横摆力矩,改善了车辆行驶稳定性。
1 理想2自由度车辆模型
图1为理想2自由度车辆模型,其动力学方程为
(1)
式中:m为车辆质量;γ为横摆角速度;Fyf和Fyr分别为前、后轮的轮胎侧向力;Iz为绕z轴的转动惯量;lf和lr分别为从车辆质心到前轴和后轴的距离;ay为侧向加速度。ay计算式为
(2)

(3)

由参考模型可得车辆的理想横摆角速度,可由车辆转向角和侧向速度进行简单的计算[10]:
(4)
式中:l为前后轴的距离;δf为车辆转向角;K为稳定性因数。
另外,由于侧向加速度受到路面附着系数的限制,则横摆角速度的上限可确定为
γu_bound=0.85μg/vx
(5)
式中:μ为路面附着系数;g为重力加速度。
因此,联合式(4)和式(5),定义理想横摆角速度为
γNO=min(|γideal|,γu_bound)·sgn(|γideal|)
(6)
2 控制系统
当车辆行驶路径偏离理想路径一定程度时,须对车辆施加一个补偿横摆力矩,以保持车辆的行驶稳定性。图2为车辆稳定性控制系统的总框图。通过模糊控制确定控制变量的门限值,利用逻辑门限控制计算出控制变量的有效值,然后根据PI控制获得附加横摆力矩,最后在电控液压制动(EHB)系统上通过差动制动的方式来实现。
2.1 动态逻辑门限值的计算
为了避免对车辆进行频繁稳定控制,并且保证在横摆角速度偏差超过了偏差容限及车辆没有出现明显不稳定的情况下,只选择横摆角速度偏差作为稳定性控制变量,只有当车辆出现明显不稳定情况时,才联合横摆角速度偏差和质心侧偏角变化率共同参与控制。因此须对控制变量设定门限值。
若门限值设定为固定值,当门限值设置过大时,会使控制系统不敏感;当门限值设置过小时,不仅会使控制系统过于敏感,而且容易获得过大的有效控制变量。由此可知,设置固定的门限值将得不到最佳的有效控制变量。因此本文中将对门限值进行动态设置。由于逻辑门限值与车辆的行驶状态和行驶环境成非线性关系,因此本文中采用模糊控制器获得逻辑门限值。
2.1.1 横摆角速度偏差的门限值计算
横摆角速度偏差的门限值Δγth受转向盘转角变化率和路面附着系数的影响较大。当转向盘转角变化率绝对值较高时,因为汽车横摆响应滞后相对较大,所以设定门限值Δγth应当稍宽些;而当路面附着系数相对较高时,因为车辆的横摆角速度能达到实际值相对较大,所以设定的门限值Δγth应当尽可能宽些。

将模糊控制器的输入量转向盘转角变化率绝对值和路面附着系数的基本域分为4个等级,将模糊控制器的输出量门限值Δγth的基本域分为6个等级,其隶属度函数分别如图3~图5所示。
另外,模糊控制器的模糊逻辑规则如表1所示,根据该模糊规则获得的门限值Δγth,能够使车辆的横摆稳定性控制系统充分有效而又不过于敏感地进行稳定性控制。
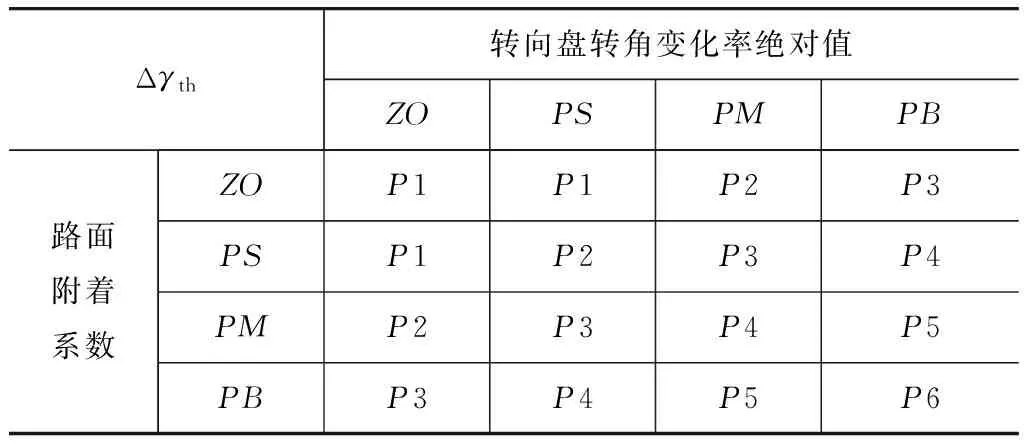
表1 门限值Δγth的模糊逻辑规则
2.1.2 质心侧偏角变化率的门限值计算
由于质心侧偏角变化率的门限值Δβth与路面附着系数和车速的关系较大,因此本文中选用模糊控制器来获得最合适的偏差带,以路面附着系数和车速为模糊控制器的输入变量,以门限值Δβth作为模糊控制器的输出变量。路面附着系数的基本论域为[0,1],车速的基本论域为[0,140],控制量门限值Δβth的基本论域为[0,25]。取路面附着系数和车速的量化因子分别为Ke=1和Kv=140,取输出门限值的比例因子Ku=25。
将模糊控制器的输入量路面附着系数μ和车速vx的基本域分为4个等级,将模糊控制器的输出量门限值Δβth的基本域分为5个等级,其隶属度函数分别如图6~图8所示。
模糊控制器的模糊逻辑规则如表2所示。根据该模糊规则获得的门限值Δβth能够保证:当失稳不严重时,控制变量质心侧偏角变化率不参与控制,仅利用横摆角速度偏差作为控制变量;当失稳比较严重时,控制变量横摆角速度偏差和质心侧偏角变化率联合参与控制。
2.2 基于逻辑门限PI控制的附加横摆力矩计算
利用模糊控制获得控制变量的动态门限值后,再利用式(7)和式(8)分别计算出控制变量横摆角速度偏差和质心侧偏角变化率的有效值。
(7)
(8)
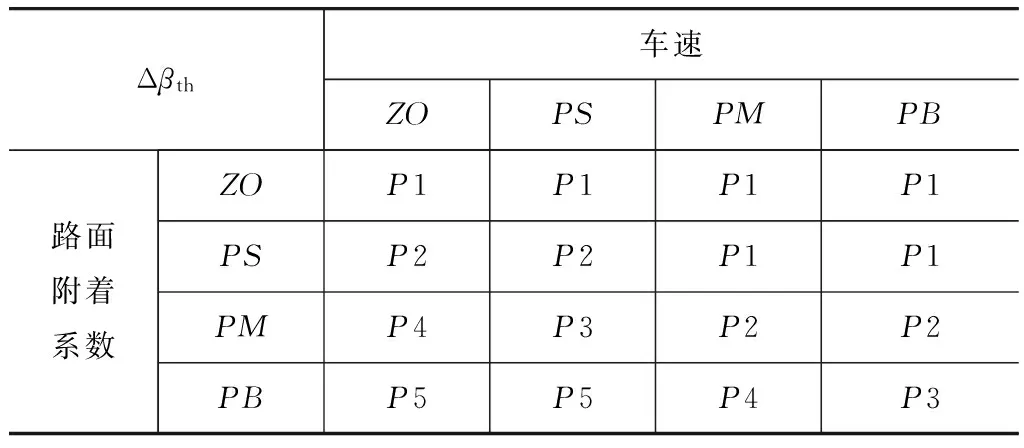
表2 门限值Δβth的模糊逻辑规则
式中:门限值Δγth满足Δγth=Δγth+=-Δγth-;门限值Δβth满足Δβth=Δβth+=-Δβth-。
根据实际情况,本文中选择PI控制的方法来计算附加横摆力矩ΔM,以满足横摆稳定性的要求。以横摆角速度偏差和质心侧偏角变化率的有效值分别作为PI控制器的输入量,并利用PI控制器分别获得附加横摆力矩ΔMγ和ΔMβ,如式(9)和式(10)所示。然后再将ΔMγ和ΔMβ线性相加得到使车辆保持稳定所需的最终附加横摆力矩。
(9)
(10)
式中:kp1和kp2为比例系数;ki1和ki2为积分系数。
2.3 附加横摆力矩实现
对于需要施加在车辆上的附加横摆力矩可通过液压调节器改变车轮轮缸制动压力的方式来实现。但是对4个车轮独立制动时所获得附加横摆力矩的效率不同。本文中采用单轮制动的方式调节车辆稳定性,因此可以选择对制动效率高的车轮进行稳定性制动。横摆力矩的轮间分配制动车轮选择原则如表3所示。
对于附加横摆力矩所对应的轮缸制动压力计算,本文中不考虑车轮滑移率和踏板制动等因素影响,直接根据决策出的ΔM计算轮缸所需制动力,计算方法为
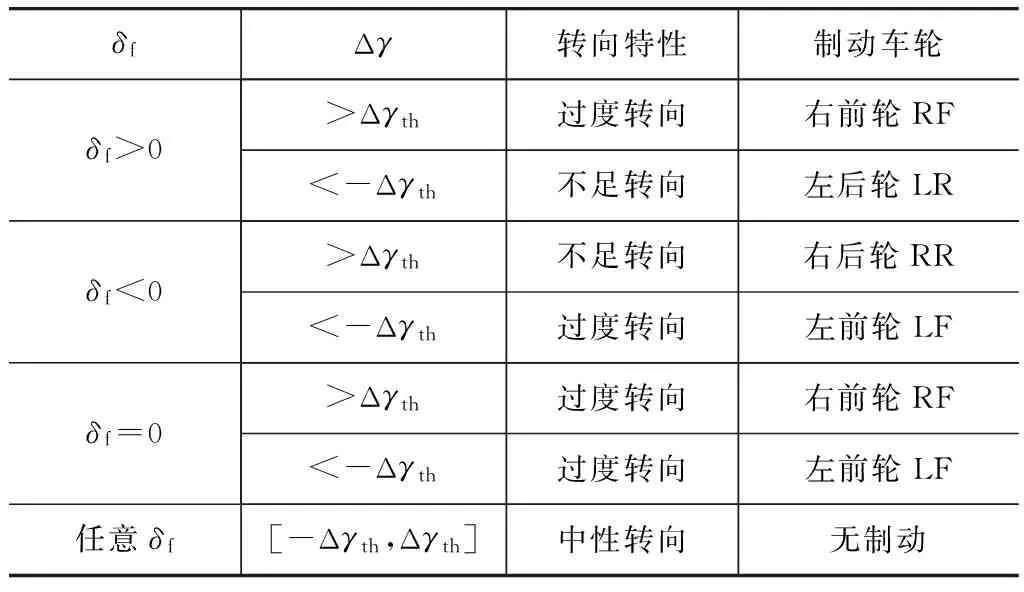
表3 制动压力分配策略
(11)
式中:t为车轮轮距;Rw为车轮半径;Rbrk为制动器的有效作用半径;Abrk为制动器的有效作用面积;kef为制动器的制动效能因数。
3 仿真结果
在由Simulink、AMESim和CarSim建立的联合仿真环境中进行仿真实验,其中包括AMESim搭建EHB系统的液压调节器模型、CarSim建立的车辆系统模型和Simulink建立的控制逻辑模型。仿真实验的车辆模型参数如表4所示。
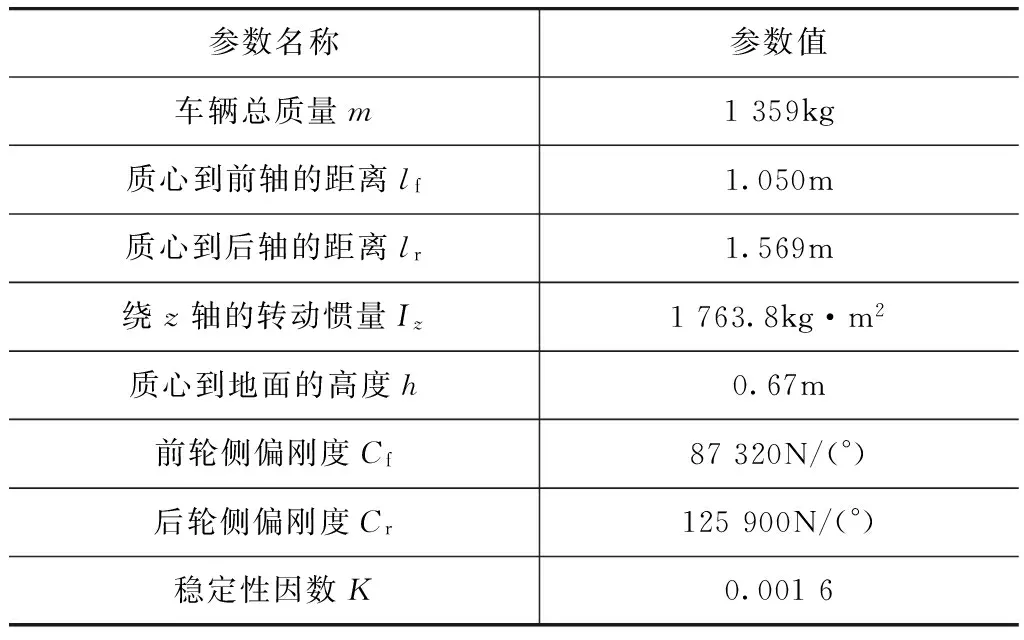
表4 仿真参数
为分析所研究稳定控制策略的有效性,考虑使用一些标准的测试工况,并对标准的测试工况进行适当的修改。第一项测试是一种标准的J形转弯,转向在0.2s时开始,并在0.2s的时间内转向角度为120°。另一项测试是转向盘转角输入信号采用一种“正弦停顿”的形式,输入正弦波的频率为0.7Hz,并且在第2峰值延迟500ms[10]。本实验测试,已经对FMVSS126ESC测试进行修改,所用车辆的转向角输入与本文的模型一致。
3.1 转向盘角阶跃输入
转向盘转角以阶跃输入时,在低附着系数工况下进行仿真实验。设定车辆初始速度为80km/h,路面附着系数为0.4,输入转向盘转角如图9所示。实验仿真得到在有、无横摆稳定性控制两种工况下的横摆角速度和质心侧偏角的比较图如图10所示。由图可见:在允许的横摆角速度偏差范围内,施加稳定性控制的车辆横摆角速度能够更好地跟踪理想的车辆横摆角速度,且横摆角速度偏差能够控制在合适的范围内;而不施加横摆稳定性控制的车辆横摆角速度则偏离了理想横摆角速度,且横摆角速度偏差的波动较大。
图11为有、无横摆稳定性控制的质心侧偏角。由图可见:施加车辆稳定性控制策略的车辆质心侧偏角抑制得也很好,使质心侧偏角也能够保持在很小的范围内;而没有施加稳定性控制的车辆,其质心侧偏角比有控制情况下要大,且波动很大。
图12为在有控制的情况下由AMESim搭建的液压模型获得的轮缸压力曲线。从制动力的分配曲线情况可知:在0.2s时车辆开始向左转向,实际的横摆角速度比理想的横摆角速度小,车辆处于不足转向的状态,通过对左后轮的制动获得一个逆时针方向的附加横摆力矩;在0.5s时,实际的横摆角速度大于理想的横摆角速度,车辆进入过度转向状态,通过对右前轮的制动获得一个顺时针方向的附加横摆力矩。在车辆进行转向的过程中,通过对车辆车轮施加一定的制动力,改善了车辆的行驶稳定性。
3.2 转向盘正弦输入
车辆在瞬态操纵下的响应是汽车动力性能的一个重要方面,转向盘角阶跃输入并不能完全反映实际情况下的汽车响应的好坏,转向盘正弦输入仿真更加符合实际汽车行驶过程,所以下面进行低附着系数路面上转向盘正弦输入的仿真。图13为转向盘转角的正弦输入信号。设定车辆初始速度为80km/h,路面附着系数为0.4。
图14为有、无横摆稳定性控制的横摆角速度与理想横摆角速度的对比。由图可见,施加车辆稳定性控制的车辆可较好地跟随期望的车辆横摆角速度,不施加横摆稳定性控制的车辆的横摆角速度严重偏离理想横摆角速度。
图15为有、无横摆稳定性控制的质心侧偏角。由图可见,施加车辆稳定性控制策略的车辆质心侧偏角也得到很好的抑制,而没有施加稳定性控制的车辆在转向过程中汽车质心侧偏角逐渐增大而失去控制。图16为在有控制的情况下的轮缸压力曲线。
4 结论
为提高车辆稳定性,本文中在电控液压制动(EHB)系统的基础上提出了一种变逻辑门限值的车辆稳定性控制策略,利用模糊推理对动态门限值进行了计算,在动态门限值确定的基础上,联合逻辑门限和PI控制计算出附加横摆力矩,最后在EHB系统上通过差动制动的方式,实现车辆所需的附加横摆力矩。电控液压制动(EHB)系统作为线控制动系统不断发展过程中的必经阶段,近几年的技术发展速度较快,其技术将在未来较短的时间内实现成熟应用,因此该车辆稳定性控制策略也将有较好的应用前景。
[1] Da W, Chen N, Zhang B J, et al. Enhancements in Vehicle Stability with Yaw Moment Control via Differential Braking[C]. 2009 IEEE International Conference on Vehicular Electronics and Safety (ICVES),2009:136-140.
[2] Papelis Y E, Watson G S, Brown T L. An Empirical Study of the Effectiveness of Electronic Stability Control System in Reducing Loss of Vehicle Control[J]. Accident Analysis & Prevention,2010,42(3):929-934.
[3] Zheng H, Chen Y, Zong C. Braking Stability Control Algorithm for Vehicle Based on Fuzzy Logic[C]. Proceedings of the FISITA 2012 World Automotive Congress,2013:73-82.
[4] Li S, Pei X, Ma Y, et al. Study on Design and Simulation Analysis of Electronic Hydraulic Brake System for Vehicles[C]. 2012 International Conference on Information and Automation (ICIA),2012:464-469.
[5] Yue X, Zhang J, Lü C, et al. Computational Simulation on VSC Based on PID Coordinated Control Algorithm and Differential Brake[C]. Vehicle Power and Propulsion Conference (VPPC),2012 IEEE,2012:1329-1332.
[6] Boada B L, Boada M J L, Diaz V. Fuzzy-logic Applied to Yaw Moment Control for Vehicle Stability[J]. Vehicle System Dynamics,2005,43(10):753-770.
[7] Xuan S, Meng G, Jin L, et al. Active Yaw-moment Control Based on Logic Threshold and PID Control[C]. International Conference on Automatic Control and Artificial Intelligence (ACAI 2012),2012:338-341.
[8] Mirzaei M. A New Strategy for Minimum Usage of External Yaw Moment in Vehicle Dynamic Control System[J]. Transportation Research Part C: Emerging Technologies,2010,18(2):213-224.
[9] 丁海涛,郭孔辉,陈虹.汽车稳定性控制中横摆力矩决策的LQR方法[J].吉林大学学报(工学版),2010,40(3):597-601.
[10] 郭孔辉,付皓,胡进,等.车辆电子稳定性控制试验与评价方法的仿真应用[J].汽车技术,2008(10):3.
A Study on Vehicle Stability Control Strategy with Variable Threshold
Li Shoutao1, Ma Yongxue1, Guo Pengcheng1, Zong Changfu2& Lee Gordon3
1.CollegeofCommunicationEngineering,JilinUniversity,Changchun130022; 2.JilinUniversity,StateKeyLaboratoryofAutomotiveSimulationandControl,Changchun130022; 3.DepartmentofElectrical&ComputerEngineering,SanDiegoStateUniversity,CA92182
In order to improve vehicle stability in different road conditions, a vehicle stability control strategy with variable logic threshold is proposed with the method of determining dynamic logic threshold emphatically studied. In consideration of the effects of driving environment and movement state on logic threshold, fuzzy inference method is adopted to determine the value of yaw rate deviation and the threshold for sideslip angle changing rate respectively. Then additional yaw moment is calculated by using logic threshold PI control method. Finally, additional yaw moment is implemented in an electro-hydraulic brake system. The results of simulation show that when vehicle is in unstable state, the control strategy proposed can timely perform stability correction control, and thus enhance the driving safety of vehicle.
vehicle stability; dynamic logic threshold; fuzzy controller; EHB system
*吉林省发改委产业技术研究与开发项目(2015Y062)、吉林大学科学前沿与交叉学科创新项目(200903305)和国家自然科学基金(50775096)资助。
原稿收到日期为2013年11月18日。