基于ESP功能分配的EPS回正力矩补偿控制策略*
2015-04-12陈无畏赵林峰
杨 军,陈无畏,赵林峰,黄 鹤,高 明
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.中航工业株洲易力达有限公司,株洲 412000)
2015138
基于ESP功能分配的EPS回正力矩补偿控制策略*
杨 军,陈无畏,赵林峰,黄 鹤,高 明
(1.合肥工业大学机械与汽车工程学院,合肥 230009; 2.中航工业株洲易力达有限公司,株洲 412000)
在所建整车七自由度模型的基础上,深入分析了电子稳定程序(ESP)对电动助力转向系统(EPS)工作模式的影响,设计了非线性滑模控制器,并计算出整车横摆运动所需的稳定控制力参考值,运用功能分配的方法对稳定控制力进行合力动态分配,同时考虑在低附着系数路面汽车车轮自回正力矩的严重缺失,从而提出基于ESP作用的回正力矩补偿控制策略,对EPS的工作模式进行修正。硬件在环仿真和软件仿真的结果表明,提出的控制策略不仅改善了转向系统的回正性能,而且能够使车辆快速、准确地恢复到稳定行驶的状态,提高了其操纵稳定性。
电动助力转向;电子稳定程序;功能分配;回正力矩;硬件在环仿真
前言
电动助力转向系统(electric power steering system, EPS)用电机作为执行器来提供助力。它能够提高汽车主动安全性,节能、环保而且容易实现产品模块化,因而受到越来越多的关注。许多专家学者对EPS进行了深入研究,并取得了较好的控制效果。文献[1]中提出了一种基于转向盘转角估计的比例积分微分控制算法,以提高车辆回正性能。文献[2]中通过大量试验采集相关数据以提供电动机回正力矩。从现有文献中看出,EPS在低速区域主要集中研究其助力特性;在高速区域则主要保证EPS路感和行驶稳定性,基本不考虑其助力特性。文献[3]和文献[4]中指出当汽车行驶在低附着系数路面时,EPS回正力矩严重缺失,提出基于回正力矩补偿的EPS控制策略,实验结果表明控制效果良好。随着技术的进步和人们对车辆安全要求的提高,电子稳定性程序(electronic stability program, ESP)也逐渐倍受关注,它是车辆行驶主动安全系统之一,包含了防抱死制动系统(ABS)和驱动力控制系统(TCS)等,并增加了横摆力矩控制系统(YMC),从而在制动、驱动和转向情况下对汽车安全稳定行驶提供了有力支持。随着更多汽车装备ESP系统,利用ESP工作时得到的汽车状态信息进行EPS控制策略优化也备受关注。文献[5]中利用前轮主动转向系统(AFS)对驾驶员的过多转向操作进行回正力矩补偿控制,以改善车辆的侧向稳定性。此外,电动助力转向系统除用来对转向操作进行助力和回正控制外,还可采用将车辆横摆角速度反馈给EPS的方法来改善车辆操纵稳定性,有效减小转向过程中横摆角速度的振荡和超调,以达到改善操纵稳定性的目的[6-7]。从现有文献中可以看出,目前针对同时配置有EPS与ESP的车辆,进行ESP对EPS控制策略影响的研究很少。
本文中正是进行这方面的研究。一辆同时配置EPS与ESP的汽车在低附着系数路面高速转弯行驶并处于失稳状态时,路面回正力矩严重不足,因此,须要充分运用ESP中得到的状态信息,对传统EPS回正力矩补偿控制策略进行重新修正,从而提出基于ESP作用的EPS回正力矩补偿控制策略。
1 系统模型的建立
1.1 车辆模型
采用七自由度非线性汽车动力学模型,如图1所示。其七自由度包括纵向、侧向、横摆运动和4个车轮的回转运动。数学表达式为
(1)
(2)
(3)
其中:
(4)
(5)
(6)

1.2 EPS模型
本文中采用转向轴助力式电动助力转向系统[8],其基本组成包括转矩传感器、转角传感器、车速传感器、电控单元(ECU)、电动机和减速机构等。其动力学方程为
(7)
式中:Je和ce分别为系统总当量惯性矩和阻尼系数;Ta为助力转矩;Tor为转矩传感器测量值;θp为转向小齿轮转角;Text为路面作用于轮胎等效至转向柱的转矩,Text=M(1/G2),G2为转向轴至前轮的传动比,M为车辆两前轮回正力矩之和。
1.3 轮胎模型
仿真采用Dugoff非线性轮胎模型。它需要的参数较少,能较好地表达出轮胎非线性特征,其表达式为
Fxn=fnCxnζn(n=1,2,3,4)
(8)
Fyn=fnCynαn
(9)
(10)
(11)
式中:Cxn,Cyn分别为轮胎纵、侧向刚度;αn为轮胎侧偏角;Fzn为轮胎垂直载荷;ζn为轮胎滑移率;μ为路面附着系数。
各轮侧偏角表达式为
(12)
(13)
2 ESP系统对EPS影响分析
3 控制策略设计
通过第2节中ESP系统对EPS影响的分析,在准危险工况下,有必要对EPS传统控制策略做出修正。图2为设计的控制系统结构图。
首先依据汽车当前已知的行驶状态,即前轮转向角δ和纵向加速度ad,x,结合汽车二自由度参考模型分别计算出汽车纵向速度期望值ud、侧向速度期望值vd和横摆角速度期望值γd。结合汽车当前行驶状态,即通过车载传感器所得相应测量值,利用控制器计算出汽车横摆运动所需稳定控制力期望值Fud,以保证汽车运行状态能够较好地跟踪汽车参考模型。最终Fud将被最优分配到4个车轮上。此时,通过改变两前轮的侧向力信号输入到EPS控制模块中,计算出路面作用于轮胎的回正力矩。在EPS控制模块中,将得出的实际回正力矩值与期望回正力矩值一起输入到回正力矩控制器,计算出需要补偿(附加)的助力矩ΔTa,并通过助力电机作用到转向系统上,从而保证带有该集成控制系统的汽车可以获得最佳的动态性能。
4 非线性滑模控制器设计与合力分配
4.1 非线性滑模控制器设计
基于车辆行驶工况的复杂性,本文中设计了非线性滑模控制器,保证其具有足够的鲁棒性,具体设计方法见文献[10]。
(14)

(15)
(16)
令Fud=(FxdFydMzd)T
式中:Fxd,Fyd和Mzd分别为整车所受的纵向、侧向合力参考值和横摆合力矩参考值;sat(sp/φp)为饱和函数;sp为切换函数;φp为边界层厚度,φp>0;ηp为可变常数;λp为正数(p=1,2,3)。
4.2 合力动态分配
确定了Fud以后,就要将其分解到4个车轮。而轮胎力分配本质是一个有约束的多变量优化问题,应同时兼顾分配精度和控制能量。本文中采取基于功能分配的合力动态分配方法[11],根据实际横摆转矩与期望值偏差进行力分配。由第2节和式(6)可知,回正力矩计算主要涉及两前轮侧向力,因此在合力动态分配过程中,可通过调节纵向力和两前轮侧向力之和的功能分配系数来达到预期目的。
首先分解纵向力。定义横摆转矩误差为
(17)
由式(6)可得,纵向力产生的横摆转矩为
(18)
令Mx=k1eM
(19)
通过选择系数k1,使纵向力产生的横摆转矩补偿横摆转矩误差。为使分配结果不超过附着极限,按式(20)进行二次规划。用拉格朗日乘数法容易求得该问题的解析解。
(20)
式中:axi为地面最大摩擦力,axi=μFzi;k2,k3,k4和k5为各纵向力的功能分配系数。实际中,由于后轮侧向力与纵向力耦合,仅由式(19)不能完全补偿横摆转矩误差,须通过前轮侧向力的调整,进一步提高横摆转矩跟踪精度。
从式(6)可以看出,两个前轮侧向力产生的横摆转矩仅与二者之和有关,记Fyf=Fyfl+Fyfr,采用式(21)计算Fyf当前值:
Fyf(k)=Fyf(k-1)+k6eM
(21)
式中:Fyf与eM之间的脉冲传递函数是一个积分环节,可以消除阶跃响应下的稳态误差。最后依据垂向力大小,按比例分配前轮侧向力,即
5 回正力矩控制器设计
图3为车速72km/h,路面附着系数为0.3时,由整车模型仿真出回正力矩与车轮侧偏角的关系图。初始时,回正力矩随侧偏角的增加而增大,在某一侧偏角时达到最大值;随着侧偏角继续增大,回正力矩反而下降,此种情况下,增加了驾驶员驾驶负担且丧失路感,因此须利用ESP所获得的整车运动状态信息,并通过EPS的作用对回正力矩进行补偿。
图3中阴影部分为目标区域,正常所须回正力矩应为虚线部分,而实际回正力矩值明显不足,这需要EPS配合添加补偿值。当路面回正力矩严重不足时,驾驶员在此种情况下由于缺乏路感而导致无法正常驾驶,利用EPS对缺失的回正力矩进行补偿可以减轻驾驶员操纵负担,但在危急工况下无法保证驾驶员驾驶手感及路感,因此容易导致回正超调等情况出现,反而更会引起驾驶员的慌乱。本文中为有效减小此种情况产生的不利影响,引入与回正力矩变化率成正比的负反馈来实现EPS阻尼控制,从而削弱驾驶员快速改变前轮转角的能力。

其中实际回正力矩为
(22)
式中:M1,M2分别为车辆前左、右轮实际回正力矩;e1,e2分别为车辆前左、右轮轮胎拖矩,eq=emq+epq(q=1,2,分别表示前左、右轮),emq为机械拖距,其为常数,epq为气胎拖距,随前轮质心侧偏角、侧偏刚度以及轮胎与路面摩擦因数而改变[12],其初值为ep0。
(23)
参考回正力矩为
Mc=αq(∂Mz/∂α)
式中:Mc为参考回正力矩;(∂Mz/∂α)为侧偏角与回正力矩处于线性状态时的斜率;αq为前左右轮实时侧偏角。
(1) 当τ较大时,为尽快消除偏差,提高响应速度,应取较大的KP;同时为避免出现较大的超调,一般取KI=0。
(2) 当τ较小时,为减小偏差,并防止超调过大产生振荡,KP应减小,KI取小值。
(3) 当τ很小时,为消除静差,克服超调,使系统尽快稳定,KP值继续减小,KI值不变或稍大。
(6) 微分作用可改善系统动态特性,阻止τ变化,有助于减小超调量,消除振荡,缩短调节时间,允许加大KD,使系统稳态误差减小,提高控制精度,达到满意的控制效果。因此,在τ比较大时,KD=0,实际为PI控制;在τ比较小时,KD取适中值,实行PID控制。
式中:KPt,KIt和KDt为参数KP,KI和KD在不同状态下的加权。
由此可得到回正力矩控制器(PID)的输出:
(24)
式中:ΔTa为补偿的回正力矩;K为针对回正力矩变化率的补偿系数。
6 仿真计算与分析
为验证新回正力矩补偿控制策略的有效性,分两部分进行仿真:一是对比在高速低附着系数路面上,有ESP参与与没有ESP参与的回正力矩控制策略仿真;二是车辆稳定性仿真。结果表明,新控制策略不仅能够准确快速地补偿不足回正力矩,且提高了操纵稳定性。仿真车辆的部分参数如表1所示。
6.1 回正力矩补偿对比
进行车速72km/h,路面附着系数0.30,转向盘输入180°时变道试验和90°时让转向盘自动回正性能试验仿真,结果分别如图5和图6所示。
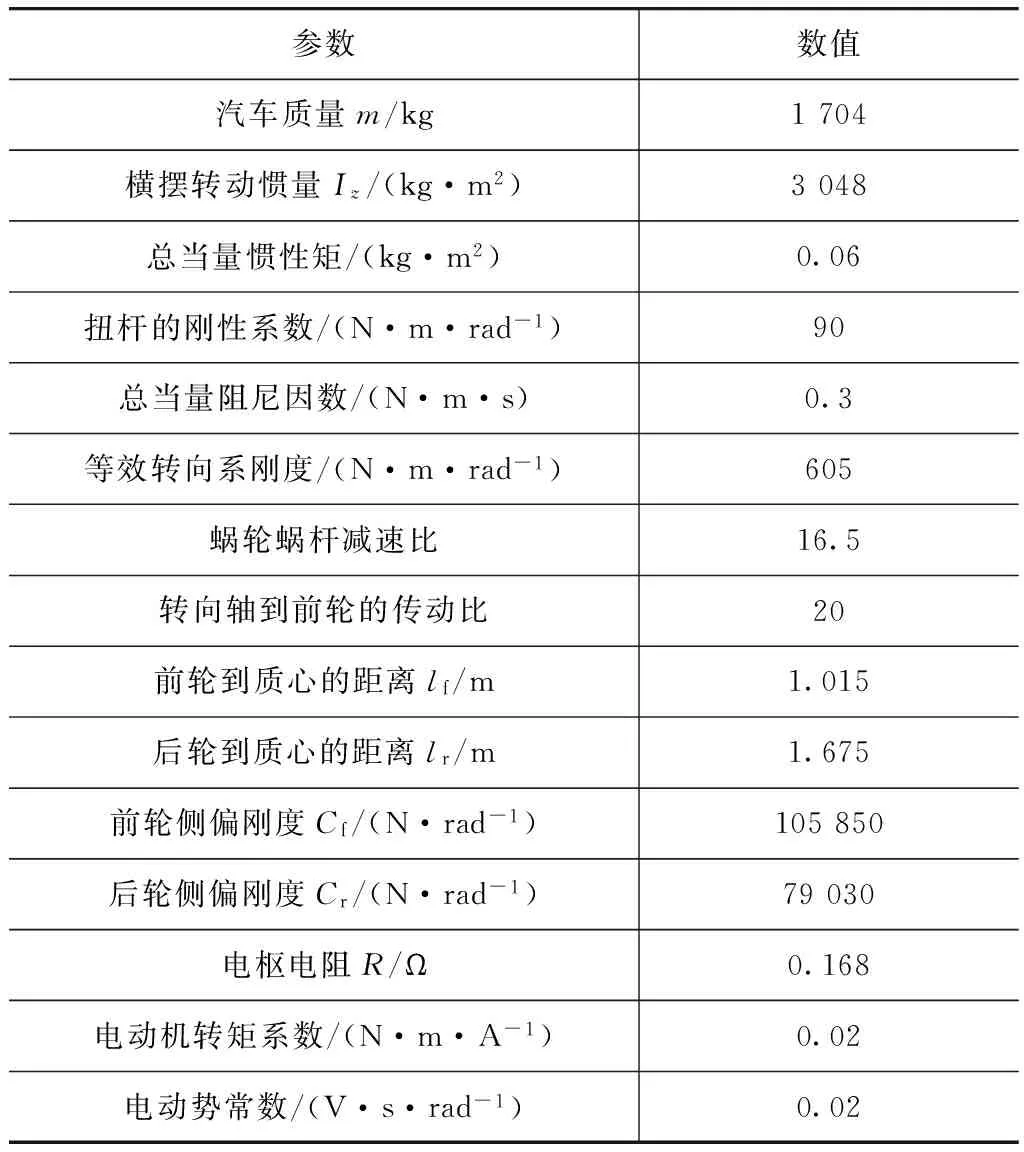
表1 车辆部分结构参数
从图5中可以看出:新回正力矩补偿控制策略比传统EPS控制策略响应时间短,而且横摆角速度幅值有所减小,这表示新控制策略能在操纵稳定性方面提供一定帮助;同时转向盘转角幅值变小,减轻驾驶负担,提高了车辆行驶安全性。图6中比较了两种控制策略的转向盘残余角,它直观地代表车辆的回正性能。图6显示出新控制策略的残余角比传统EPS的小,说明其回正性能比传统的EPS好。
6.2 车辆稳定性仿真
如上所述,在ESP工作时,侧向力改变导致电机助力发生改变。由图5可知,新回正力矩补偿控制策略在一定程度上改善了操纵系统的稳定性。因此,采用上述控制策略,对汽车无ESP控制、有ESP控制、EPS+ESP控制条件下,进行前轮转角角阶跃、变道输入的仿真计算。给定车辆初始速度为72km/h,路面附着系数为0.30,前轮转角输入为0.1rad。结果如图7~图10所示。
从图7~图10中可知:汽车在低附着系数路面没有施加控制时,侧偏角和横摆角速度响应幅值很大;施加ESP控制后其幅值明显减小,而新回正力矩补偿策略(EPS+ESP)使汽车能够更快地趋于稳定,缩短恢复时间,提高汽车操纵的稳定性。
7 硬件在环仿真试验
为充分验证控制策略的有效性,在仿真试验基础上,进行硬件在环仿真试验。硬件在环试验平台如图11所示。以某款装有EPS和ESP系统的汽车作为实验用车,EPS控制系统采用永磁同步电机,控制芯片采用ARM单片机STM32。ESP控制系统采用飞思卡尔MC9S12XS128作为其控制单元。回正力矩控制器利用ARM单片机LPC2129作为控制单元。基于汽车参数在veDYNA中建立整车模型,并根据ISO 3888规定的单移线测试标准和GB/T 6323.2—1994规定的转向瞬态响应实验来建立虚拟试验场地。子控制器输出信号可以通过接口系统分别与EPS助力电机和ESP液压系统中的电磁阀相连;硬件系统为该试验车液压系统,去掉原装控制系统(EPS/ESP),采用自主研发的控制系统、回正力矩补偿控制器电路板和各种车载传感器等。
试验设备主要包括汽车制动液压系统、汽车转向系统、各种传感器、回正力矩补偿电路板、EPS与ESP两子系统电路板、Labview的PXI主机、SCB-68接线板和PC机等。试验车速设定为72km/h,虚拟道路附着系数为0.3。试验结果如图12~图15所示。
从图12~图15中可知,硬件在环闭环仿真的结果与软件仿真结果的趋势基本一致。说明本文中所提出的控制策略不仅增加了转向系统的回正性能,而且能够使车辆快速、准确地恢复到稳定行驶的状态,提高了车辆的操纵稳定性。
8 结论
(1) 采用非线性滑模控制器计算出车辆稳定的控制力,并通过合理的选择功能分配系数进行合力动态分配,很好地将合力分配到轮胎上。
(2) 通过分析ESP系统对转向系统的影响,修正EPS的控制策略,提出了回正力矩补偿的控制策略,并采用自适应模糊PID控制方法,提高了车辆的回正性能。
(3) 仿真和硬件在环仿真表明,设计的控制策略提高了车辆在低附着路面上的回正性能,同时使车辆能够快速、准确地恢复到稳定行驶的状态,提高了汽车的行驶稳定性。
[1] 徐建平,何仁,苗立东,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004,26(5):557-559.
[2] Masahiko Kurishige, Shunichi Wada, et al. A New EPS Control Strategy to Improve Steering Wheel Returnability[C].2000 World Congress Detroit, Michigan March 6-9,2000.
[3] Hideyuki Tanaka. Development of Torque Controlled Active Steering with Improving the Vehicle Stability for Brushless EPS[C]. 2007 World Congress Detroit, Michigan April 16-19,2007.
[4] Yasuo Shimizu, Toshitake Kawai. Development of Electric Power Steering[C]. SAE Paper 910014.
[5] Tanaka H, et al. Development of Torque Controlled Active Steering with Improving the Vehicle Stability for Brushless EPS[C].SAE Paper 2007-01-1147.
[6] Yang Zhanpeng. Effect of Yaw Velocity Feed Back in Electric Power Steering System on Handling Stability of Vehicle[C]. The 2nd International Conference on Mechanic Automation and Control Engineering, July 15-17,2011,Inner Mongolia, China, MACE,2011:260-262.
[7] Roy M. Variable Effort Steering for Vehicle Stability Enhancement Using an Electric Power Steering System[C]. SAE Paper 2000-01-0817.
[8] 赵林峰,陈无畏,秦明辉,等.基于转向轻便性及回正性能设计的EPS应用[J].机械工程学报,2009,45(6):182-187.
[9] 王德平,郭孔辉,宗长福.车辆动力学稳定性控制的理论研究[J].汽车工程,2000,22(1):7-9.
[10] Fernández B, Hedrick J K. Generalized Sliding Mode Control for MIMO Nonlinear Systems[J]. International Journal of Control,1998,46(3):1019-1040.
[11] 刘跃,方敏,王洪波.车辆稳定控制中的合力计算与分配方法计算[C].第31届中国控制会议.
[12] Hsu Yung-Hsiang Judy, Gerdes J Christian. A Feel for the Road: A Method to Estimate Tire Parameters Using Steering Torque[J]. AVEC ’06.
[13] 陈无畏,刘翔宇,等.考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J].机械工程学报,2012,48(14).
The Aligning Moment Compensation Strategy forEPS Based on ESP Function Allocation
Yang Jun1, Chen Wuwei1, Zhao Linfeng1, Huang He1& Gao Ming2
1.SchoolofMechanicalandAutomotiveEngineering,HFUT,Hefei230009; 2.ZhuzhouEliteElectroMechanicalCo.,Ltd.,Zhuzhou412000
An in-depth analysis on the influence of ESP on EPS assistance mode is conducted based on a 7 DOF vehicle model built. A nonlinear sliding mode controller is designed, the reference value of stability control force for yaw motion is calculated, and the dynamic allocation of resultant stability control force is performed with function allocation method. With consideration of the seriously inadequate self-aligning moment of vehicle wheels on low adhesive road, an ESP-based aligning moment compensation control strategy is proposed with ESP working mode corrected. The results of both hardware-in-the-loop simulation and software simulation show that the control strategy proposed can not only improve the aligning performance of steering system, but also make vehicle quickly and accurately return to its stable driving state and thus enhance its handling stability.
electric power steering; electronic stability program; function allocation; aligning moment; hardware-in-the-loop simulation
*国家自然科学基金(51375131,51305118)、中航工业创新基金(cxy2010HFGD27,cxy2010HFGD26)和安徽省自然科学基金(2013AKZR0077)资助。
原稿收到日期为2013年4月8日,修改稿收到日期为2014年3月5日。
