基于图像处理的车辆防偏防追尾预警系统研究
2015-04-10赵检群许勇王善超
赵检群 许勇 王善超
摘 要:针对交通事故的不断上升,设计一种基于图像处理的车辆防偏防追尾预警系统。首先利用改进的Hough变换检测出前方车道线并进行预警决策;然后在此车道区域内根据车底部阴影的梯度特征确定前方可能存在的车辆区域,通过卡尔曼滤波器跟踪检测到的目标,并利用归一化转动惯量做车辆验证;最后根据世界坐标系和图像坐标系之间的几何映射关系测定与前车的距离,进而与计算得出的安全距离对比从而实现报警功能。实验结果表明,该系统能够有效的识别出车道线和车辆,并能很好的判断车道线偏离情况和测量车间距,从而实现预警输出。
关键词:车道检测;Hough变换;车辆识别;卡尔曼滤波;单目测距;预警系统
中图分类号:TN911.73 文献标识码:A
Abstract:This paper designed a lane departure and rearend collision warning system based on image processing. The designed system firstly detects the lane by using the improved Hough transform method and then detects the vehicle ahead according to the gradient feature of shadow in this region of the lane. Kalman filters were used to track the target vehicle,which will be assisted by normalizedmutualinformation feature. Lastly the safe distance was calculated by image mapping in coordination system to world coordination system to realize alarm function. The experimental results show that the system can effectively detect lane lines and vehicles. The system can also detect the vehicle deviation and measure the distance between vehicles correctly, and give the early warning if necessay.
Key words:lane detection; Hough transform; vehicle identification;kalman filter; monocular measurement of distance; early warning system
1 引 言
随着汽车保有量的迅速增加,使汽车安全成为了现代汽车学上最重要的议题,各大汽车厂商也将产品的安全性能作为差异化竞争的重点之一[1]。如今传统的制动系统基本上已经走到了物理极限,主动安全系统将逐渐开始崭露头角。研究证明,若在公路交通事故发生前1.5s给驾驶员发出预警,则可避免90%的碰撞事故[2]。而车辆防碰撞预警系统是实现这一功能的重要手段,它能在事故发生前及时提醒驾驶员道路危险状况,为驾驶员提供更多的反应时间,使驾驶更为安全[3]。
目前国内外关于汽车智能防撞预警系统的研究,主要集中在防止车道偏离和保持安全车距这两个方面。经过长期大量的研究实践,人们逐步认识到采用单目视觉技术,即仅使用一台摄像机就能在一定程度上对前方道路环境进行监测。
因此本文设计了一种基于单目视觉的车载防偏防追尾预警系统。首先利用改进的Hough变换检测出前方车道线;然后在此车道区域内根据车底部阴影的梯度特征确定前方可能存在的车辆区域,通过卡尔曼滤波器跟踪检测到的目标,并利用归一化转动惯量进行车辆验证;再根据世界坐标系和图像坐标系之间的几何映射关系测算与前车的距离;最后根据车道状况及前后车距判断危险等级,最终向驾驶员提供相应的声光报警信号。
2 系统总体设计
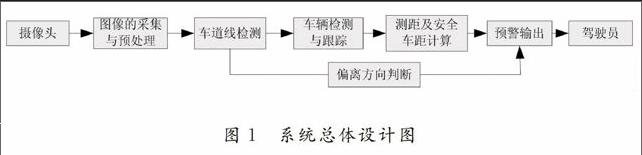
采用单目视觉技术的汽车防偏防碰撞预警系统的总体设计如图1所示。
本系统硬件部分包括08100ZMP 镜头和MVVS078FC CCD相机、PCI 1394A高速图像采集卡、DELL Latitude ES5420计算机;软件部分由车道线检测、车辆的检测与跟踪、测距、决策和报警等模块组成。
系统通过摄像头获取前方道路图像,经过灰度化、滤波等预处理后,先后识别出两侧车道线和前方车辆,然后综合分析判断车辆偏离情况以及与前方车辆的距离。如果车辆偏离或与前方车辆的间距超过设定的阈值,则通过指示灯和音频等报警方式向驾驶员发出预警。
3 车道线检测及偏离方向判断
本文采用改进的Hough变换来检测道路两侧的车道线,不仅要判断车道是否偏离,还提取出ROI区域[4],为下一步的车辆检测做准备。在进行车道线检测之前,需对图像进行预处理。
3.1 预处理
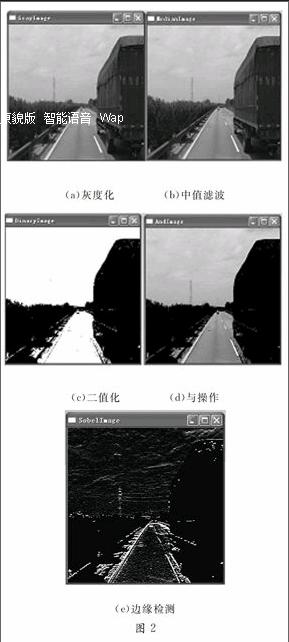
为了提高系统对图像的分析和识别能力,减小图像受光线、天气等环境因素的影响,需要对图像进行必要的预处理。首先对图像进行灰度化处理[5],结果如图2(a)所示。中值滤波法广泛应用于图像处理的减噪过程[6],平滑图像,滤波效果如图2(b)所示。车道线与路面背景部分的对比度差异较为明显,利用大津阈值算法对图像进行分割[7],获得二值化图像,如图2(c)所示。为了突出车道线轮廓,将灰度化图像与二值化图像进行“与”运算,效果如图2(d)所示。通过sobel算子边缘检测增强图像的道路边缘信息[8],结果如图2(e)所示。
3.2 基于改进Hough变换的车道线检测
Hough变换是由霍夫于1962年提出的一种用参数来检测线性目标的方法,它的基本原理在于利用点与线的对偶性,将原始图像空间给定的曲线通过曲线表达形式变为参数空间里的一个点[9]。
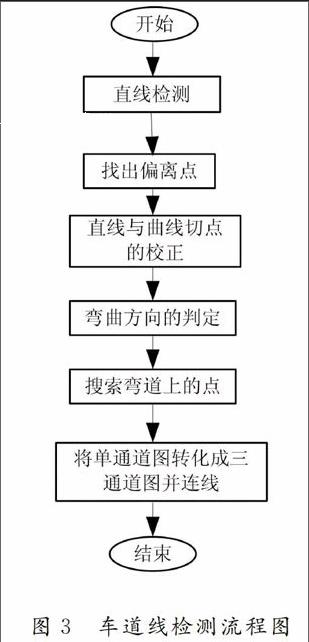
本文采用文献[10]中的基于改进的Hough变换来检测车道线[10],同时在判断车道偏离的方法上与文献[10]中的方法又有所区别,车道线检测流程图如下图3所示。首先用Hough变换对左右两车道分别进行直线检测,从而确定车道线的大概形状、位置;然后从左右直线车道交点向下遍历,找出偏离点,再然后用偏离点到直线交点间的一小块区域内的像素统计来确定车道的偏离方向,进而找出弯道的方法;最后将单通道图像转换成三通道图像,在三通道图像中用线连接检测到的点。
具体实现过程如下:
1)直线检测:通过对采集得到的图像进行观察,可以发现车道线一般位于图像的下半部分,为了加快系统的处理速度,将图像的下半部分设置为直线检测区域。在用Hough变换进行直线检测时,选择左车道线θ的范围为[40°,70°],右车道线的θ的范围为[110°,160°]。
2)找出偏离点,并进行直线与曲线切点的校正,然后判断弯曲方向。本文采用的方法可以快速的的判断车道偏离方向,具体如下所示:将搜索的区域分为4个区域,如图4所示,其中的区域1与区域3对应于车道的左偏,区域2与区域4对应于车道的右偏。对区域1和区域4进行灰度值的统计,分别记为numll,numrr,然后按以下步骤进行处理:
(1)若numll>numrr,且numrr<10,则说明车道左偏。这时蜂鸣器连续鸣叫,车辆左偏移的轨道图标闪烁,提醒驾驶员向右操作。
(2)若numrr>numll,且numll<10,则判定车道右偏。这时蜂鸣器连续鸣叫,车辆右偏移的轨道图标闪烁,提醒驾驶员向左操作。
(3)若没有出现上述两种情况,则判定车道行驶正常。
3)采用动态改变搜索区域的方法[11]找出车道的曲线部分的点。
4)先将单通道图像转化成三通道图像,在此图像上用绿线连接所检测到的点。自此,完成了对车道线的识别提取,效果如下图5所示。
数据可以得出单目视觉测距的相对误差在10%以内,可以满足实际工作中测距报警的需要,而更详细的数据需要进一步的大量实验来获取。而前车处的车辆宽度值不仅关系到实测距离L的值,同时也影响安全距离S的值,因此准确的检测到前方车辆是本文的关键所在。7 结 论
本文设计的基于图像处理的车辆防偏防追尾预警系统能够有效地检测到车道线并进行正确的偏离报警;将检测到的车辆图像参数代入两车间距模型公式计算出两车间的车距及安全距离并实现报警输出;满足了公路环境下车道偏离及测距报警的要求。该方法简单实用,该系统简单实用、虚警率低、抗干扰力强,具有很好的实时性和较强的通用性。
参考文献
[1] [EB/OL]http://www.eepw.com.cn/article/215601.htm汽车电子2014进入智能变革时代
[2] 乔维高. 汽车碰撞预警系统研究[J]. 武汉理工大学报,2005,27(1):121-123.
[3] 钱卫东,刘志强. 车辆智能防撞预警系统的研究和发展[J]. 技术与应用,2009,(3):22-25.
[4] 刘志强,温华. 基于单目视觉的车辆碰撞预警系统[J]. 计算机应用,2007,27(8):2056-2058.
[5] 李莹,高满屯. 基于边缘颜色信息的车牌定位算法[J]. 计算机仿真,2009,26(8):262-265,303.
[6] ZHENG D,ZHAO Y,WANG J. An efficial method of license plate location[J]. Pattern Recongnition Letters, 2005,26(15):2431-2438.
[7] 沈晶,刘海波,周长建,等. Visual C++数字图像处理典型案例详解[M]. 北京:机械工业出版社,2012.
[8] 艾海舟,武勃等译. 图像处理,分析与机器视觉[M]. 北京:人民邮电出版社,2003.
[9] 王昱. 移动机器人视觉道路检测的研究与实现[D]. 南京:东南大学,2010.
[10]HOUGH P.V.C. Method and Means for Recognizing Complex Patterns[J]. U.S. Patent, 1962,30(1):54-59.
[11]李明,黄华,夏建刚. 基于Hough变换的车道检测改进算法研究[J]. 计算机工程与设计, 2012,33(4):1638-1642.
[12]王文杰. 基于视觉的道路区域和车道线识别技术在智能车辆导航中的应用研究 [D]. 济南:山东大学硕士学位论文,2009.
[13]张建明,张玲增,刘志强. 一种结合多特征的前方车辆检测与跟踪方法[J]. 计算机工程与应用, 2011,47(5):220-223.
[14]杨炜,魏朗,巩建强,等. 基于单目视觉的纵向车间距检测研究[J]. 计算机测量与控制,2012,20(8):2030-2041,2044.
[15]刘燕,刘浩学. 基于计算机视觉的单目摄影纵向车距测量系统研究[J]. 公路交通科技,2004,21(9):103-106,111.
[16]钟勇,姚剑锋. 行进中车辆临界安全车距的探讨[J]. 湖南大学学报:自然科学版,2001,28(6):54-58.
