基于MapReduce的城市道路旅行时间短时预测
2016-11-07杨宗润
摘要:旅行时间是交通系统中一个重要的测量指标,精确的旅行时间预测对智能交通系统和先进交通信息系统发展有重要意义。数据采集技术为旅行时间计算提供了海量实时交通数据,如何利用海量实时交通数据精确且快速预测旅行时间成为当前旅行时间研究中的一个热点问题。基于海量的车牌识别数据,在Hadoop框架下,用MapReduce编程模型,应用卡尔曼滤波法实现对路段旅行时间的预测,和其它算法对比,该算法预测准确性有显著提高。
关键词:旅行时间预测;MapReduce;卡尔曼滤波
DOIDOI:10.11907/rjdk.161465
中图分类号:TP391
文献标识码:A文章编号文章编号:16727800(2016)009013703
基金项目基金项目:国家自然科学基金重点项目(61033006);北京市自然科学基金项目(4131001)
作者简介作者简介:杨宗润(1989-),男,河南新乡人,北方工业大学计算机学院硕士研究生,研究方向为分布式计算。
0引言
旅行时间是交通系统的重要参数,是指车辆在一定距离道路上的用时。在城市化进程中,城市人口和机动车数量急剧增加,给城市道路带来了较大负荷,影响居民出行。精确的旅行时间预测可以为城市规划以及居民出行提供参考。
旅行时间本身具有高度的随机性和时间依赖性,不定时的交通管制、偶然的交通事故、天气状况等都会一定程度上影响旅行时间。目前计算旅行时间的数据主要有两种:道路上的感应线圈数据和装载有GPS的车辆数据。两种数据都具有一定的局限性,对于感应线圈数据而言,道路感应线圈不可能覆盖到每一条道路,覆盖密度很大程度上影响了数据的精确性;从感应线圈并不能直接获得车辆的旅行时间,而是要通过速度来计算旅行时间,无形中放大了误差[12]。对GPS数据来源而言,装载GPS设备的车辆数占总数的比例很小[3],用少数量车辆数据去刻画所有车辆的行为,具有一定的局限性。
近年来,国内外学者提出了诸多预测旅行时间的思路。台湾高雄大学的Chun Hisn Wu等[4]把支持向量回归算法应用到旅行时间的预测上,该方法在面对大规模数据时显得很无力。微软亚洲研究院郑宇[5]提出了上下文矩阵分解和最优道路划分的方法,应用大量历史数据,成功解决了数据稀疏性问题,给出了基于路径的旅行时间预测算法[6]。然而此算法定义的数据结构复杂,应用起来比较困难。俄亥俄州立大学的Abjhijit Dharia[7]用反向人工神经网络预测了高速公路的旅行时间。德州农业大学的Dongjoo Park 和韩国延世大学的Gunhee Han等[8]对原始数据进行了处理,提出了基于光谱的神经网络算法,应用到了旅行时间的预测上来。人工神经网络算法在收敛性上不是很突出,且隐含层的选择也没有确定的算法。还有一些其它算法,例如贝叶斯理论[9]和混合Logit模型[10]等。
1问题描述
1.1旅行时间短时预测
本文成果系某市智能交通项目,通过各大路口摄像头采集机动车牌,经过数据整合存储在HDFS中。单个数据项包含车牌号、时间、摄像头编号等。
实验采用卡尔曼滤波法进行短时间预测。卡尔曼滤波是一种先进的控制方法,其以20世纪60年代卡尔曼提出的滤波理论为基础[11],基于线性回归预测,方法简单且预测精度较高,适合大规模数据计算,在很多预测领域得到应用。目前卡尔曼滤波法在交通领域预测的应用大多采用感应线圈数据[12]和GPS数据[13]。本实验在Hadoop环境下进行,将卡尔曼滤波法应用到车牌识别数据处理中。
1.2卡尔曼滤波法
一般的线性离散系统可有一组滤波递推公式表示:
X(k+1)=Φ(k+1,k)X(k)+Γ(k+1,k)w(k) (1)
4结语
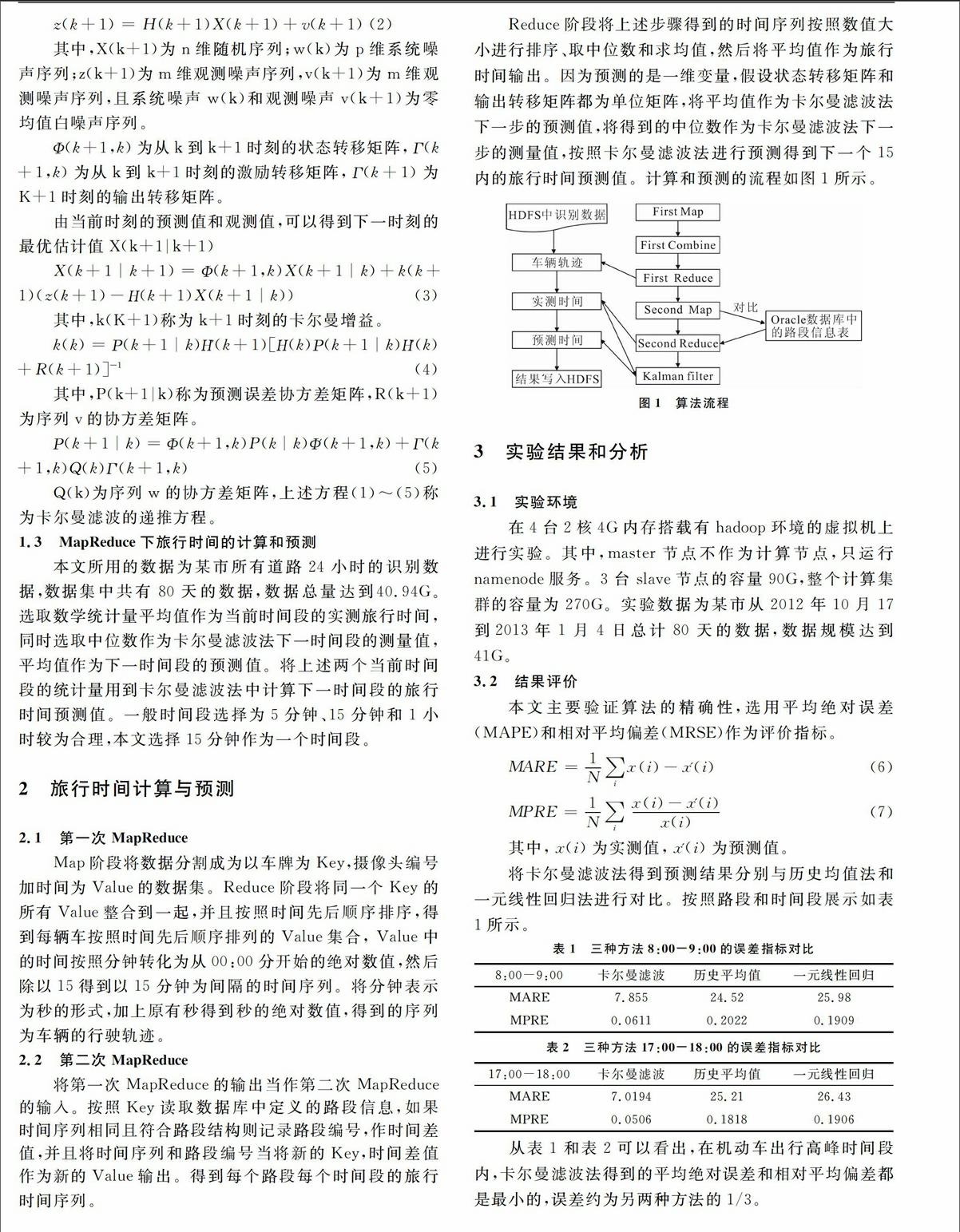
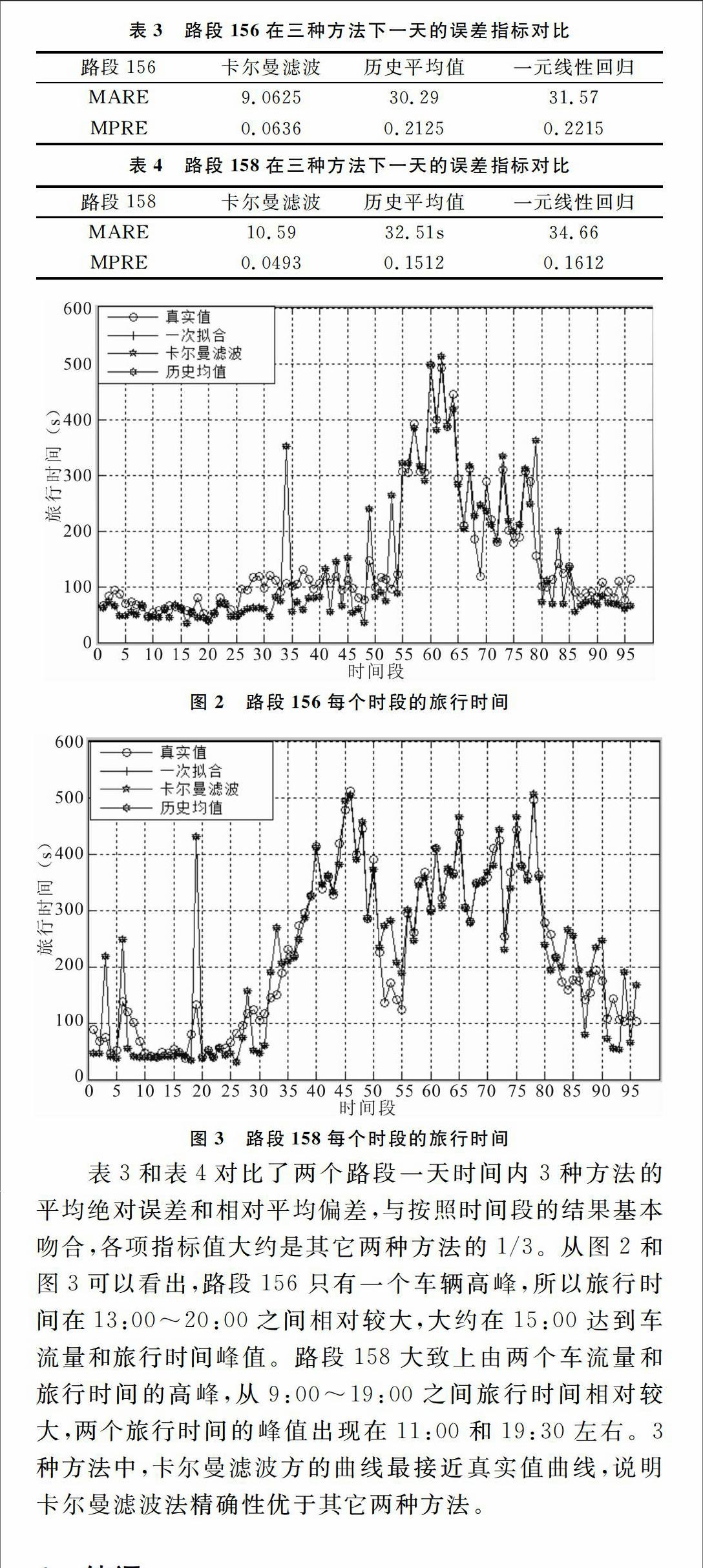
本文实验在hadoop框架下采用MapReduce模型,对道路摄像头采集数据进行挖掘,得到符合定义的真实值,
真实值符合城市机动车出行规律,用卡尔曼滤波法结合MapReduce实现短时间内对路段旅行时间的预测,预测方法的精确度较高。本文实验还有一些不足之处,预测值只用到前一个时间段的数据,出现大误差的几率大大增加。此外,实验预测只是对短时间内单个路段的预测,还不能用于路径的预测。
参考文献:
[1]STEVEN I, CHIEN J, KUCHIPUDI C M.Dynamic travel time prediction with real-time and historic data[J].Journal of transportation engineering, 2013(25):3541.
[2]CHU L, OH S, RECKER W.Adaptive kalman filter based freeway travel time estimation[C].84th TRB Annual Meeting, Washington DC, 2005.
[3]CHEN M, CHIEN S.Dynamic freeway traveltime prediction with probe vehicle data: link based versus path based[J].Transportation Research Record, 2001 (1768): 157161.
[4]WU C H, HO J M, LEE D T.Traveltime prediction with support vector regression[J].Intelligent Transportation Systems, 2004, 5(4): 276281.
[5]WANG Y, ZHENG Y, XUE Y.Travel time estimation of a path using sparse trajectories[C].Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining.ACM, 2014: 2534.
[6]YUAN J, ZHENG Y, ZHANG C, et al.Tdrive: driving directions based on taxi trajectories[C].Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems.ACM, 2010: 99108.
[7]DHARIA A, ADELI H.Neural network model for rapid forecasting of freeway link travel time[J].Engineering Applications of Artificial Intelligence, 2003, 16(7): 607613.
[8]PARK D, RILETT L R, HAN G.Spectral basis neural networks for realtime travel time forecasting[J].Journal of Transportation Engineering, 1999, 125(6): 515523.
[9]WESTGATE B S, WOODARD D B, MATTESON D S, et al.Travel time estimation for ambulances using Bayesian data augmentation[J].The Annals of Applied Statistics, 2013, 7(2): 11391161.
[10]HESS S, BIERLAIRE M, POLAK J W.Estimation of value of traveltime savings using mixed logit models[J].Transportation Research Part A:Policy and Practice, 2005, 39(2): 221236.
[11]KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of Fluids Engineering, 1960, 82(1): 3545.
[12]FARAGHER R.Understanding the basis of the Kalman filter via a simple and intuitive derivation[J].IEEE Signal processing magazine, 2012, 29(5): 128132.
[13]YANG J S.Travel time prediction using the GPS test vehicle and Kalman filtering techniques[C].American Control Conference,2005:21282133.
责任编辑(责任编辑:陈福时)
