基于时频域指标的控制系统演化校正
2015-04-10冯文静周永华
冯文静 周永华
摘 要:针对控制系统校正器参数适应系统时-频域特定性能要求的问题,提出一种基于自适应粒子群算法的控制系统校正方法。它以系统的时域误差积分指标为目标函数,以系统的幅值裕度、相角裕度等频域指标为约束条件建立优化模型。再利用罚函数,将该带约束的目标函数转化无约束的目标函数。之后,在Matlab环境下,将自适应粒子群算法与Simulink仿真技术相结合,优化控制系统校正器参数,从而实现控制系统校正。仿真结果表明,这种方法简单、高效,所设计的校正器性能优异,十分适合于工程应用。
关键词:自适应粒子群算法;控制系统校正 ;罚函数 ;仿真
中图分类号:TP273 文献标识码:A
Abstract:Aiming at the problem of the parameters of control system's corrector to fit the system's timefrequency domain performance requirements, this paper proposed a correction method based on Adaptive Particle Swarm Optimization algorithm. Firstly, the optimization model including the object function and constrain condition was established. The object function was the time domain integral of the error indicator. Constrain condition consisted of system's gain margin, phase margin and other frequency index. Then, by using the penalty function, the objective function with constraints was converted into objective function without constraints. Last, in the MATLAB environment, Adaptive Particle Swarm Optimization algorithm was connected with Simulink simulation technology, and the parameters of the control system's corrector were optimized. After that, correcting control system was implemented. Simulation results show that this method was simple and effective. The performance of the corrector designed by the method was much more excellent and very suitable for engineering applications.
Key words:APSO algorithm; control system calibration; penalty function; optimal parameters
1 引 言
在实际工程中,反馈系统经常会出现不稳定现象,或者在某些方面不能满足设计者和使用者的要求,于是,常常会在反馈系统中增加串联校正环节和局部反馈,以改善反馈系统的性能。这种方式即为经典控制理论中的核心问题之一,称为控制系统校正[1]。
经典的控制系统校正通常采用较为简单的时域或者频域设计法,甚至经验公式[2-6]。一般情况下,频域设计法主要以系统满足最小幅值裕度和相角裕度为目标,这样可以使系统具有较好的鲁棒性,但其时域性能不一定理想;时域设计法主要以系统最小误差积分为目标,但其鲁棒性不一定好。因此,理想方案则是将二者结合起来 [7-8]。
本文将控制系统校正设计问题转化为优化问题,利用粒子群算法(Partical Swarm Optimization,PSO)完成校正器参数设计,使得系统时-频域指标同时满足要求。
粒子群算法[9]是一类新型的群智能优化算法。由于PSO概念简单,易于实现,因而在短期内得到很大发展。对于处理复杂优化问题,它具有计算快速性、强适应性、全局性等优势。
2 问题描述
按照校正装置在系统中的连接方式,控制系统校正方式可分为串联校正、反馈校正、前馈校正和复合校正等。本文只讨论串联校正。
在采用串联校正时,根据校正装置的特性,校正装置可分为超前校正、滞后校正和滞后-超前校正装置。当校正环节不能满足系统各项性能指标时,可在滞后-超前校正装置基础之上,进行扩展,将多个超前校正装置或滞后校正装置进行串联。这样构成的校正装置可称为多级校正装置。本文将对四级校正装置进行研究分析。
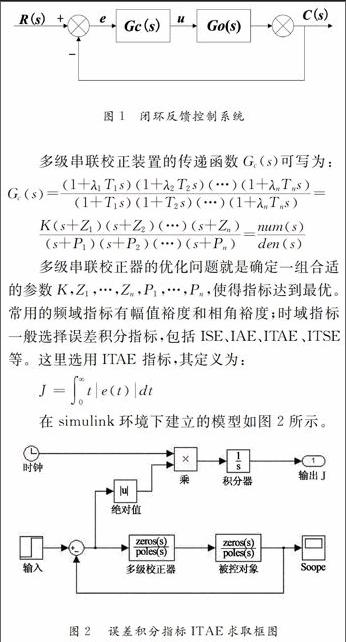
考虑如图1所示的反馈系统,其采用的校正方式为多级串联校正。
惯性权重ω表明粒子原先的速度能在多大程度上得到保留,体现了全局搜索能力和局部搜索能力之间的平衡关系。学习因子c1、c2表明粒子所受到的自身最优的位置及全局最优的位置的影响力。上述标准的PSO算法采用固定的惯性权重和学习因子,在优化复杂函数时易容易陷入局部极值点或早熟收敛等问题。因此,很多研究者们提出了许多改进策略,如文献[10]提出自适应调整惯性权重策略。这使得算法在迭代初期探索能力较强,可以不断搜索新的区域,然后开发能力逐渐增强,使算法可以在可能最优解周围精细搜索;文献[11]针对高维复杂函数的标准粒子群算法常存在早熟收敛问题,提出一种让初始化粒子群的位置“相对均匀”并且随着搜索阶段不同而改变认知学习因子和社会学习因子的算法。
本文在这里采用自适应粒子群算法(APSO)对权重惯性和学习因子进行改进。对性能较好的粒子采用较大的ω,让其对更优区域继续搜索;而对性能较差的粒子则采用较小的ω,让其迅速收敛到较好区域进行细致搜索。另外,在搜索初期,为了防止粒子快速聚集在局部最优解周围,让c1取较大值,c2取较小值;在搜索后期,为了使粒子快速、准确收敛于全局最优解,让c1取较小值,c2取较大值。
5 结 论
综上所述,本文在Matlab和Simulink环境下用APSO算法优化多级校正器参数的方法,克服了在传统控制系统校正设计中过程复杂、计算量大的缺点,使设计效率大幅提高,设计难度大为下降。以系统时-频域指标同时满足要求为目的所设计出的校正器大大提高了系统的稳定性,十分适合工程应用。同时,对Simulink中系统框图和Matlab程序个别地方稍作修改即可适应新的被控对象和目标函数,其可塑性强,具有广阔的发展前景。
参考文献
[1] 胡寿松.自动控制原理[M].北京:科学出版社,2001.
[2] SHAFIEI Z,SHENTON A T.Frequencydomain Design of PID Controllers for Stable and Unstable systems with Time Delay[J].Automatica,1997,33(12):2223-2232.
[3] 周永华,刘阳.基于遗传算法的控制系统校正[J].控制工程,2012,19(4): 603-606.
[4] ABBAS A.A new set of controller tuning relations[J].ISA Transactions,1997,36(3):183-187.
[5] 孙秀华.基于Matlab设计频率法的控制系统校正环节.节电一体化[J],2011,17(1):33-35.
[6] 欧林林, 顾诞英,张卫东,等.基于幅值裕度和相位裕度的PID参数最优整定方法[J].控制理论与应用,2007, 24(5):837-840.
[7] HO W K,GAM O P,TAY E B,ANG E L.Performance and gain phase margin of wellknown PID tuning formulas[J].IEEE Trans. Control Systems Technol.,1996,4(4):473- 477.
[8] 郑立新,周凯汀,王永初,等.PID进化设计法[J].仪器仪表学报,2001,22(4).
[9] KENNEDY J,EBERHART R.Particle Swarm Opyimization[C]. In:Proc IEEE Int Conf on Neural Networks,1995:1942-1948.
[10]SHI Y,EBERHART R,MODIFIEDA.Particle Swarm Optimizer.[C]In:Proceedings of the IEEE International Conference on Evolutionary.Piscataway,NJ:IEEE Press, 1998: 69-73.
[11]任建伟,武璇.一种动态改变学习因子的简化粒子群算法[J].自动化技术与应用,2013,31(10):24-28.
[12]陈宝林.最优化理论与算法[M].北京:清华大学出版社,1989:481-507.
