螺钉防松胶对反射镜面形影响的研究与试验
2015-04-03樊延超柴方茂李志来董得义
樊延超,柴方茂,李志来,董得义,徐 宏
螺钉防松胶对反射镜面形影响的研究与试验
樊延超,柴方茂,李志来,董得义,徐 宏
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
反射镜组件作为空间相机的重要组件,在进行组件装配时,不但要保证其联接结构具有足够的联接预紧力以抵御动载荷或工作温度变化带来的影响,还要准确控制拧紧力矩避免对镜面面形造成较大的影响。以某空间相机的主镜组件为例,对螺钉防松的工作机理、采用防松粘接剂情况下的实际紧固力矩计算、对反射镜镜面的影响等方面进行了分析计算,并进行了试验验证。分析及试验结果表明,不同的螺钉防松胶对拧紧力矩、预紧力及反射镜面形造成较大的影响,其中,与不使用防松胶相比,硅橡胶(GD-414)和厌氧胶(J-222)对镜面面形的影响分别增加了31.9%和74%。在使用螺钉防松胶进行防松处理时,应根据不同防松胶的具体特性,调整螺钉拧紧力矩,在联接环节具有较高可靠性的同时,降低其对反射镜面形的影响。
螺钉防松胶;空间相机;反射镜组件;镜面面形;拧紧力矩;预紧力
0 引言
螺纹联接结构作为空间相机大量使用的基本结构,其可靠性事关航天型号的成败[1]。一般螺纹联接都具有自锁性,但在变载、冲击或振动作用下,以及工作温度变化较大时可能松动,导致预紧力下降。螺纹联接的使用实践及防松性能试验,疲劳强度试验证明:松动失效是承受交变载荷的螺纹联接的主要失效形式之一。保证螺纹联接结构可靠性的关键是选用合适的防松技术并控制螺纹联接预紧力。
从有关标准和文献[2-4]中可以看到,螺纹紧固件防松技术和防松结构很多。从作用机理可以分为:摩擦防松、机械防松和永久止动等。从具体实现形式上又可以分为两大类,一类是依靠防松零件来实现,如自锁螺母、弹簧垫圈、锁紧丝、双螺母等;另一类是通过胶粘剂实现防松,这种方法是在要配合的螺纹表面涂覆胶粘剂,待其固化后即可牢固地粘住相配合的螺纹副,以达到锁紧防松的目的[5]。航天产品对螺纹防松提出了更高的要求[6]。航天器在飞行过程中会产生剧烈的振动,因此,要求螺纹联接件具有更好的防松能力;空间环境的温度变化要求在联接部位应具有良好的耐高、低温性能;航天产品在装配和使用过程中,可能由于某些原因需要反复拆装,这就要求螺纹联接用胶粘剂在保证一定联接强度的前提下,具有较好的可拆卸性,不会因为拆卸而破坏产品的结构和功能。
从文献[7]可以看出,带齿螺栓头、固体防松胶以及液体防松胶的防松效果是比较理想的。对空间相机来说,带齿螺栓头螺钉由于其装配复杂性很少应用;而使用防松胶,则螺钉装配工艺简单,不产生额外附着物,能够满足航天产品的防松紧固需求。
对于空间相机的反射镜组件,由于其镜面面形精度一般达到纳米级。因此,不但要保证联接环节有足够的联接预紧力抵御动载荷(变载、冲击、振动)或工作温度变化带来的影响,还要准确控制拧紧力矩避免对镜面面形造成较大的影响。
本文以某空间相机的主镜组件为例,对螺钉防松的工作机理、采用防螺钉防松胶情况下的实际紧固力矩计算、对反射镜镜面的影响等方面进行一些探讨。
1 螺钉防松的工作机理
螺钉联接防松的实质,在于预紧力产生的摩擦力能够抵抗环境应力载荷,保持联接件的相对状态,防止松动。拧紧螺钉时,需要克服螺纹副的螺纹阻力矩1和螺钉头与联接件支撑面的摩擦力矩2,则拧紧力矩如下式所示:
式中:¢为预紧力,N;2为螺纹中径;为螺纹大径;为螺纹升角,通常=arctan(/(π2)),其中为螺距;¢为螺纹副的当量摩擦角,通常¢=arctan(),其中为螺纹当量摩擦因数;e为螺钉头与联接件支撑面之间的摩擦系数;1为螺钉头联接面的外径;0为钉孔直径;t为拧紧力矩系数,与螺钉尺寸、螺纹副和支撑面的摩擦因数等因素有关。
用普通螺钉联接时,由于螺纹升角(=1°42′~3°2′)小于螺纹副的当量摩擦角(¢=6.5°~10.5°),再加上拧紧后螺钉头支撑面与联接件之间存在着摩擦力,因此在静载荷时,紧固螺纹联接都能自锁。有关理论证明,以力矩拧紧的螺钉联接,其松退力矩约为拧紧力矩的80%。因此,只要作用在螺钉的松退力矩小于0.8,联接就不会发生松动[8]。但在变载、冲击、振动作用下,防止螺纹副相对转动的自锁摩擦力矩可能急剧下降,使螺纹副间产生微量相对滑动,从而导致联接松动。
在螺纹副上涂抹防松胶,利用防松胶填充螺纹间隙而使其啮合面积增加,同时,因胶固化后而新增加的防松力矩可以补偿松退力矩与拧紧力矩的差值,使其大体相当,从根本上提高了螺纹联接的抗振防松能力。
2 防松胶对拧紧力矩及面形的影响
目前国内常用的螺钉防松胶主要有:硅橡胶和厌氧胶等。
硅橡胶(GD-414)属于中性单组份室温硫化硅橡胶,产品硫化时对金属无腐蚀性,具有高强度、高断裂伸长率,可在-60℃~200℃范围内长期使用并有十分优异的耐紫外光、耐气候老化及良好的电绝缘性等特点;对玻璃、金属、陶瓷和树脂层压材料等有良好的粘接性能。J-222属于厌氧粘接剂,在螺纹表面涂敷厌氧胶后拧紧螺纹,胶液挤压并填充在螺纹副之间的空隙中,由于氧气浓度较低,厌氧胶自行固化;固化产生的聚合物将螺纹副粘接在一起,从而有效地保证了螺纹的紧密联接。这两种胶固化后,能够增加螺纹联接的耐磨性和吸振性,减弱螺纹啮合部位的微动磨损,一定程度上维持了摩擦力产生的扭矩,提高了螺纹联接的可靠性。
在使用螺钉防松胶提高螺纹联接可靠性的同时,由于在联接过程中防松胶能起到一定的润滑作用,这将对预紧力造成一定影响。由式(1)可以看出,对于一定性能等级和直径的螺钉,在一定的使用工况下,其拧紧力矩与拧紧力矩系数t是线性函数关系。而拧紧力矩系数t与螺钉与联接件之间的摩擦系数成正比关系。而摩擦系数直接与螺钉防松胶的种类和型号有关。对于同样的拧紧力矩,使用不同的螺钉防松胶将会使螺钉产生不同的预紧力。
2.1 确定预紧力的依据
螺钉联接拧紧时,在拧紧力矩的作用下,螺钉除了预紧力¢的拉伸产生拉伸应力外,还受螺纹摩擦力矩下的扭转而产生扭剪应力,使螺钉处于拉伸和扭转的复合应力作用状态中,根据第四强度理论,可以求出螺钉预紧状态下当量应力v:

一般规定拧紧后螺纹联接件预紧应力不得大于其材料的屈服点s的80%[9]。因此,在拧紧螺钉时,应保证螺钉不屈服,则应使:
v=1.3≤0.8s(3)
因此,螺钉最大拉伸应力≈0.6s,对于螺钉公称应力截面积为s的最大预紧力¢=0.6ss。一般推荐用预紧力限值如下:¢=(0.5~0.6)ss。
2.2 螺钉防松胶对拧紧力矩的影响
对不使用螺钉防松胶、使用硅橡胶(GD-414)和厌氧胶(J-222)三种状态下,螺钉的拧紧力矩进行分析计算。
空间相机的主镜通过柔性支撑结构与基座相联。其中,柔性支撑联接环节采用12个经过蓝色阳极化处理的M8规格的钛合金螺钉联接。根据厂家提供的测试数据,其许用应力s=800MPa。此规格的螺钉主要参数如下:=8mm,2=7.188mm,=3.168°,当量摩擦因数=0.15,¢=8.531°,1=13mm,0=9mm。
螺钉公称应力截面积s=(π/4)·[(1+d2-1.732/12)/2]2=35.65mm2,其中,为螺距,取1.25。
根据防松胶生产厂家及机械设计手册[10],不使用螺钉防松胶、使用硅橡胶(GD-414)和厌氧胶(J-222)三种工况下的螺钉头与联接件支撑面之间的摩擦系数e分别为0.16、0.10和0.06。因此,根据公式(1)可知,最大许用拧紧力矩分别为27.96N·m、22.25N·m和18.44N·m,最小许用拧紧力矩分别为23.3N·m、18.54N·m和15.37N·m。由此可见,在采用不同的螺钉防松胶的情况下,由于其润滑条件不同,即使预紧力相同,螺钉的拧紧力矩有较大的差别。因此,在对螺钉进行紧固时,需要充分考虑防松胶对于拧紧力矩和预紧力的影响。
根据装配要求,螺钉联接的净拧紧力矩有如下要求:20N·m≤≤21N·m。如果在对螺钉进行预紧时,按照此拧紧力矩执行,而忽略螺钉防松胶对于拧紧力矩的影响,则3种工况下,螺钉预紧力分别为12241.3N~12853.3N(0.43ss~0.45ss),15382.1N~16151.2N(0.54ss~0.57ss)和18556.0N~19483.8N(0.65ss~0.68ss)。从计算结果可以看出,在不使用螺钉防松胶的情况下,螺钉联接具有较小的预紧力,低于推荐限值;而使用厌氧胶(J-222),则螺钉上的应力超过推荐限值。这两种状态下,螺钉联接均具有较低的可靠性。
2.3 螺钉防松胶对镜面面形的影响分析
建立了主镜及支撑结构的有限元模型,对不使用螺钉防松胶、使用硅橡胶(GD-414)和厌氧胶(J-222)三种工况下,拧紧力矩对镜面面形的影响进行分析。根据零件结构的特点,主要采用8节点六面体单元对各零件进行有限元网格划分,在关键传力点进行了网格加密。
在反射镜组件的有限元模型中共划分了82 770个单元,120 010个节点。主镜为碳化硅(SiC)材料,柔性支撑联接环节及基座材料分别为钛合金(TC4)和殷钢(4J36),3种材料的材料参数如表1所示。3种材料的材料参数全部由各自的生产厂商提供。每种材料每个参数的误差也由各自的厂商提供,材料参数的误差为随机误差,正态分布。
在拧紧力矩取20.5N·m的情况下,对3种工况下拧紧力矩对镜面的影响进行分析。镜面面形变化云图及镜面局部最大变形量分析数值分别如图1和表2所示。
3 防松胶对主镜影响的试验验证
3.1 螺钉防松胶对主镜镜面面形的影响
在主镜面形加工至RMS=0.150时,进行了主镜组件的装配。在装配前进行了面形检测,如图2所示。从检测结果可以看出,主镜镜面支撑孔位置无明显高低起伏。

表1 材料主要参数

图1 三种工况下的镜面支撑位置变形云图

表2 三种工况下镜面支撑位置变化分析结果

图2 装配前主镜面形检测结果
根据装调工艺要求,在装配过程中所带来的装配应力不应改变镜面面形分布,镜面局部最大变形量不应超过当前镜面PV值的40%。根据装配前的检测结果,镜面局部最大变形不应超过0.7。
在装配试验中,首先不使用螺钉防松胶进行装配,使用20.5N·m力矩拧紧,对装配后的主镜进行了面形检测,检测结果如图3所示。从检测结果可以看出,镜面3个支撑点位置出现了PV约为0.530的凹坑,镜面面形分布也没有发生改变。
对联接螺钉采用厌氧胶(J-222)进行防松处理时,仍然用20.5N·m力矩拧紧。处理后进行了面形检测,检测结果如图4(a)所示。从面形云图及支撑点变化图中可以看出,镜面上3个支撑点位置的凹坑明显变深,PV约为0.922,局部最大变形量已超出装配工艺要求,同时镜面面形分布也发生了较大的变化。查阅厌氧胶(J-222)的技术参数后,对其预紧力进行了复核,发现预紧力超过许用值,螺钉的应力已超过许用应力。根据预紧力的推荐限值,对拧紧力矩进行了调整。为验证计算结果,对图4(a)左侧支撑孔取预紧力¢=0.56ss,则相应的拧紧力矩为17.21N·m,对图4(a)右上侧支撑孔取预紧力¢=0.60ss,则相应的拧紧力矩为18.44N·m,检测结果如图4(b)所示。由检测结果可知,在合理调整拧紧力矩的情况下,相应的支撑点位置的变化有了明显的改善。
对联接环节的钛合金螺钉进行更换,对不使用螺钉防松胶的主镜面形进行了复检,镜面面形数值恢复到了之前的状态。对联接螺钉采用硅橡胶(GD-414)进行防松处理,使用20.5N·m力矩拧紧。点胶后进行了面形检测,检测结果如图5所示,3个支撑孔位置的局部最大变形量能够满足装配工艺要求,且镜面面形分布没有发生变化。
通过试验可知,与不使用螺钉防松胶相比,采用硅橡胶(GD-414)和厌氧胶(J-222)进行防松处理后,主镜支撑位置的局部最大变形量增加了31.9%和74.0%。由于材料参数的随机误差及相关材料摩擦系数差异的随机性,实际试验测试结果要偏大一些。但分析结果与试验结果的数值量级及趋势是一致的。
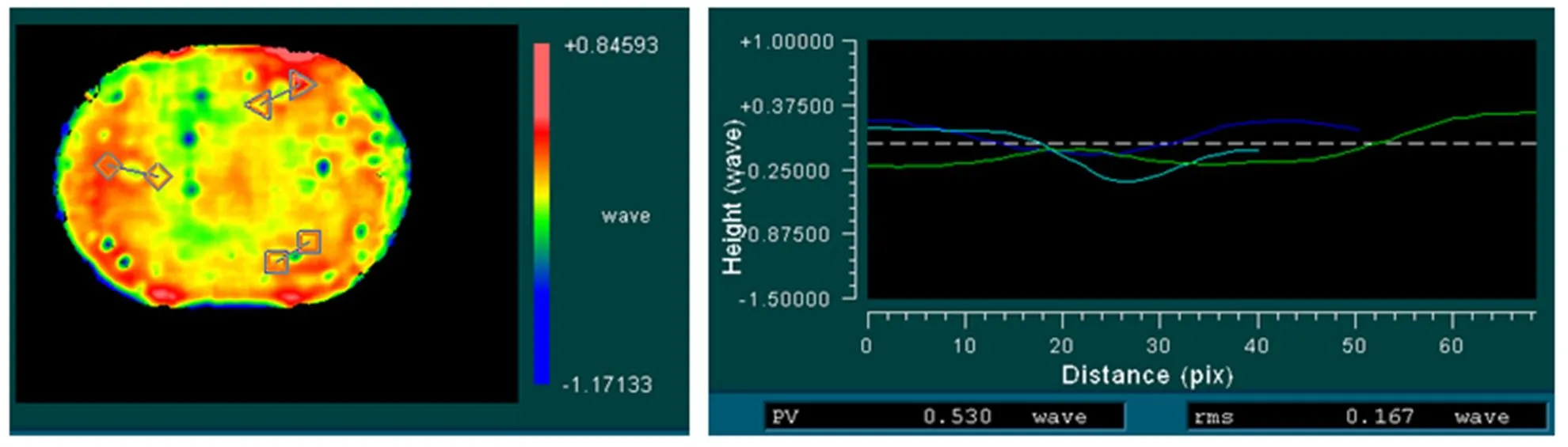
图3 不使用螺钉防松胶的主镜面形检测结果

图4 使用厌氧胶(J-222)的主镜面形检测结果
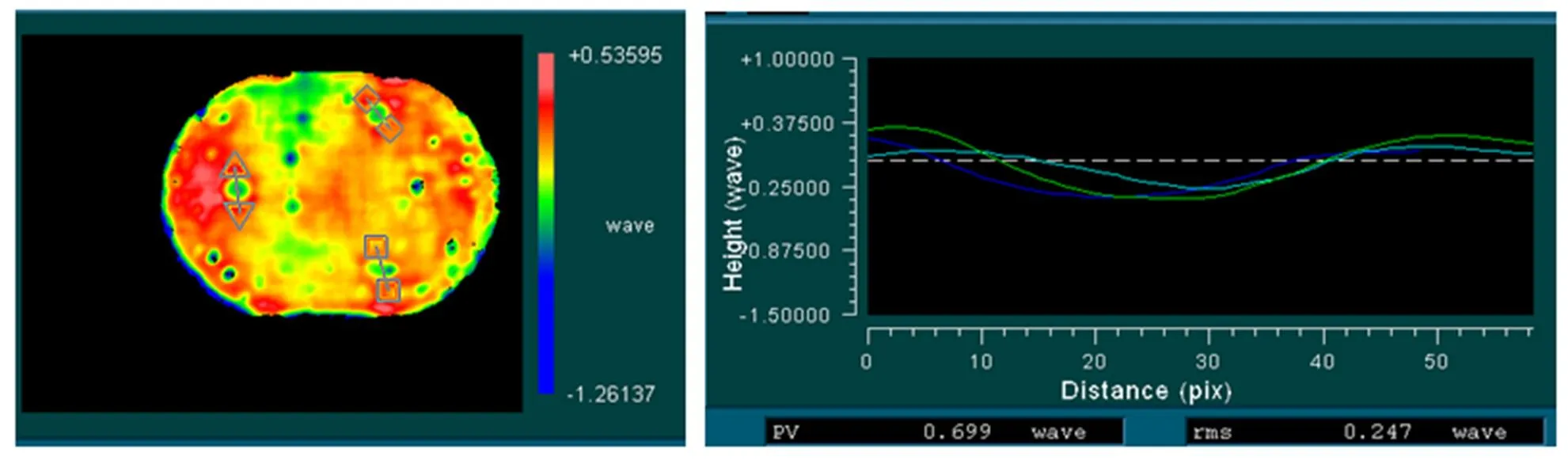
图5 使用硅橡胶(GD-414)的主镜面形检测结果
对于主镜联接环节而言,从联接可靠性角度考虑,虽然在不使用螺钉防松胶装配的情况下,镜面面形变化更小,但根据2.2节的分析结果,不使用螺钉防松胶装配,其预紧力低于推荐限值,联接可靠性不高。单纯从预紧力角度考虑,当不使用螺钉防松胶装配时,应适当增加拧紧力矩或者添加合适的润滑剂;当使用厌氧胶(J-222)装配时,需要适当减少拧紧力矩。
综合考虑联接环节防松的可靠性和预紧力对镜面的影响情况,最终确定采用硅橡胶(GD-414)对主镜联接环节进行防松处理。在此基础上,需要对联接环节的可靠性进行试验验证,检验其是否满足当前环境条件的要求。
3.2 螺钉防松胶对主镜稳定性的影响
在组件装配后,为了验证螺钉防松胶对主镜稳定性的影响及防松效果的有效性,对主镜组件进行了力学和热稳定性试验。
试验后对主镜面形进行了复检,检测结果如图6所示,镜面面形与试验前相比没有发生变化。试验前后,用经纬仪检测了主镜相对于底板的位置关系变化,其中,扭摆方向变化2.2″,俯仰方向变化1.7″。力学试验前后,主镜组件的模态变化小于1%。试验结果表明,螺钉采用硅橡胶(GD-414)进行防松处理,可以保证螺钉联接具有足够的可靠性,满足当前环境条件的要求。
4 结论
以某空间相机的主镜组件为例,对螺钉防松的工作机理、采用螺钉防松胶情况下的实际紧固力矩计算、螺钉防松胶对反射镜镜面的影响等方面进行了探讨。通过试验验证了不同的螺钉防松胶由于其润滑因素,对螺钉的拧紧力矩会产生较大影响,与不使用防松胶相比,硅橡胶(GD-414)和厌氧胶(J-222)对镜面面形的影响分别增加了31.9%和74%。因此,在使用螺钉防松胶进行螺钉防松处理时,需要根据防松胶的特性,结合联接材料及螺钉的性能,选取合适的拧紧力矩,在保证螺钉具有较好的防松效果和联接可靠性的同时,不会对镜面造成较大影响。

图6 试验后主镜面形检测结果
[1] 李至广. 钛合金螺纹连接结构预紧力、应力、可靠性分析[D]. 长沙:国防科学技术大学, 2004.
[2] 李维荣, 朱家诚. 螺纹紧固件防松技术探讨[J]. 机电产品开发与创新, 2003(2): 15- 17.
[3] 那晶晶, 贾彦辉. 常用螺钉连接防松措施的机理分析与实验研究[J]. 河北省科学院学报, 2012, 29(4): 34-40.
[4] 邓智. 一种验证预涂胶螺钉防松性能的振动试验方法[J]. 机械工程师, 2013(5): 52-53.
[5] 张忠伟, 刘锴, 林海燕, 等. 螺纹连接件胶结防松技术的现状与应用[J]. 军民两用技术与产品, 2012(12): 45- 47.
[6] 宋冬. 航天产品整机的防振加固工艺[J]. 电子工艺技术, 2013, 34(1): 29-33.
[7] 项忠霞, 董刚, 林梦霞, 等. 螺纹联接防松方法的评述[J]. 机械设计, 1996(11): 1- 2.
[8] 卜炎. 螺纹联接设计与计算[M]. 北京: 高等教育出版社, 1995: 144-161.
[9] 山本晃. 螺纹联接的理论与计算[M]. 郭可谦, 译. 上海: 上海科学技术文献出版社, 1984: 75-90.
[10] 成大先, 王德夫, 姬奎生, 等. 机械设计手册[M]. 北京: 化学工业出版社, 2002: 3-317-3-332, 5-53-5-63.
Research and Experiment of Influence on the Mirror Surface Figure Caused by Looseness-proof Adhesive
FAN Yan-chao,CHAI Fang-mao,LI Zhi-lai,DONG De-yi,XU Hong
(Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)
Mirror subassembly is the important component of space camera, so the sufficient pre-tightening force of the joint structure should be guaranteed to resist the effect caused by dynamic load or temperature change in component assembling, at the same time, tightening torque should also be accurately controlled to reduce the influence on the surface figure. The primary mirror of some space camera taken as an example, the principle of threaded connection’s looseness-proof, the precise tightening torque caused by looseness-proof adhesive, and the effect on surface figure are analyzed and calculated, and verification test is carried out. The results of both the analysis and the experiments indicate that different types of looseness-proof adhesive can make great influence on the tightening torque, pre-tightening force and mirror surface figure, which can be increased to 31.9% and 74% more with Silicon Rubber adhesive(GD-414) and anaerobic adhesive(J-222)used respectively compared with no looseness-proof adhesives. When looseness-proof adhesive used, tightening torque should be precisely adjusted according to the special properties of the adhesives so as to ensure that the reliability of joint structure is sufficient and the influence on the mirror surface figure is under control.
looseness-proof adhesive,space camera,mirror subassembly,mirror surface figure,tightening torque,pre-tightening force
TH75
A
1001-8891(2015)05-0392-06
2014-11-25;
2015-04-15.
樊延超(1984-),男(汉族),河南省新安县人,助理研究员,硕士,主要研究工作是空间光学遥感器光机结构设计。E-mail:dulangfan303@163.com。
国家863高技术研究发展计划资助项目,编号:2009AA7020107。
