基于水声技术的非法作业船只远程监听系统设计*
2015-03-30王洋东巩庆伟陈耀武
王洋东,巩庆伟,陈耀武
(浙江大学 数字技术及仪器研究所,浙江 杭州310027)
0 引 言
目前,以浮标、潜标为水听器安装平台,国外最常见的是海洋环境噪声监听浮标,主要用于对风暴潮的监听或对某些特定目标噪声的监听,基于浮标为安装平台的用于监听海洋调查船、海洋资源勘探所发射的气枪、电火花和低频大功率声源信号的水声远程监听系统国内外尚未见报道。国内军方研制的声纳浮标主要用于特定位置水下反潜作战,是一种探测的距离范围小、工作时间短的装备,并不适合中国海监对维权与执法的应用[1]。另一方面,近年来随着全光纤线列阵的发展,岸基远程探测声纳在国内外发展迅猛,国内有关单位也开展了样机研制和海上示范,这种声纳由于不受安装条件限制因而规模较大,能够较好地实现对目标的远程探测功能,但需要铺设海底光缆和水听器阵列的水下掩埋,工程造价昂贵,设备维修艰难,除军事用途外并不适合大规模应用[2]。
本文提出一种基于水声技术的非法作业船只远程监听系统,可对进入我国海域的非法作业船只进行长期不间断的远程探测、跟踪及指示其活动方位。此外,该装备还具有对脉冲信号的远程侦测、识别功能,包括气枪声源、电火花声源及低频声纳大功率发射声源,从而获取非法侵权船只的实时作业活动,使得国家海上维权与执法具有更好的实时性和针对性。
1 系统原理和结构
基于水声技术的非法作业船只远程监听系统的结构如图1 所示,由水声通信换能器、电子舱、水听器和基阵架四部分组成。
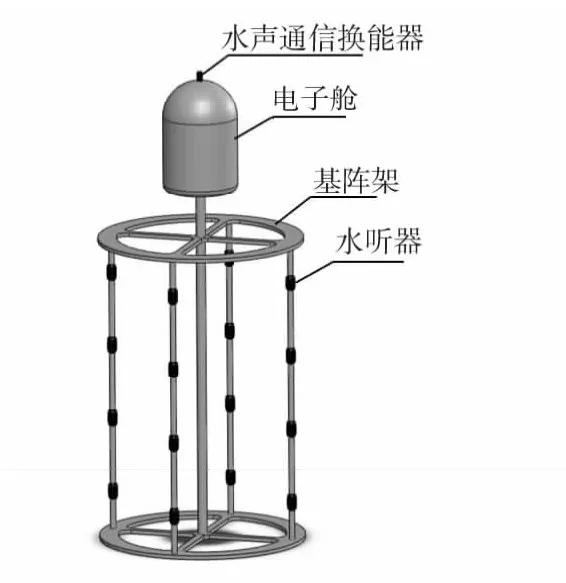
图1 系统结构示意图Fig 1 Diagram of system structure
水听器材料采用PZT—5 压电陶瓷,其敏感的压电效应将接收声波产生的机械振动转换为微弱的电压信号。单个水听器的工作频段主要覆盖20 ~1 000 Hz,接收灵敏度大于-197 dB,在工作频段内幅度起伏要求小于0.5 dB,耐压大于5 MPa。低频带宽接收水听器基阵采用圆柱阵形式,水平维一圈4 个阵元,垂直维4 个并联组成一列,形成在垂直方向具有一定指向性的阵列以抑制近海表面噪声,同时水平维也可利用正交“十字”形状的4 个接收水听器构成1 个矢量水听器,用于测向[3]。
在换能器基阵中潜标端MODEM 只用1 只收发合置换能器,而浮标端MODEM 采用一条四元垂直短阵(孔径1 m),加上收发合置换能器,共5 个接收通道,如图2 所示。
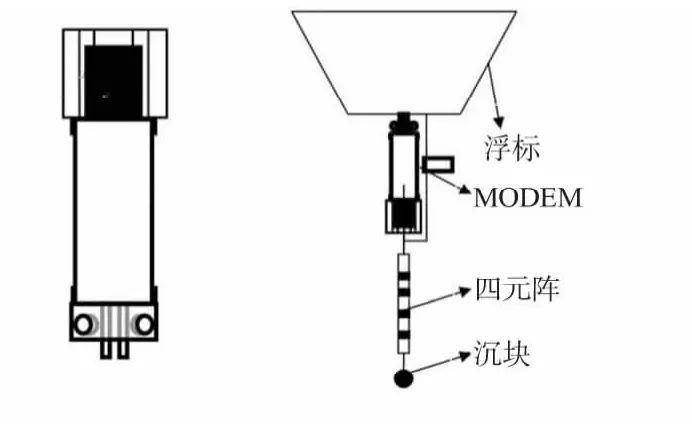
图2 水声MODEM 示意图Fig 2 Diagram of underwater acoustic MODEM
电子舱内实现接收水听器基阵的声学信号进行同步A/D 采集,并对采集的数据进行离散傅里叶变换(discrete Fourier transformation,DFT),最小方差无畸变响应(minimum variance distortionless response,MVDR)测向和矢量测向等运算,将处理结果和相应的罗盘信息传送到数据通信和控制模块,通过水声通信模块传送到数据中心。
2 系统设计
2.1 硬件设计
基于水声技术的非法作业船只远程监听系统主要由电子舱内的低功耗信号处理板完成接收水听器基阵的声学信号同步A/D 采集与处理,以及数据存储与传输。
低功耗信号处理板如图3 所示。低功耗信号处理板以XILINX 公司的ZYNQ—7000 为核心,该芯片是基于XILINX全可编程的可扩展处理平台结构,在单芯片内集成双核A9多核处理器的处理系统(processing system,PS)和XILINX可编程逻辑(programmable logic,PL)。在芯片内部,通过AXI 总线方式实现处理系统与可编程逻辑的互联,在单芯片内实现交互。低功耗信号处理板由电源管理、前置放大滤波、A/D 采集、检测和测向处理、数据整理与存储等模块构成,实现水下远程监听。
前置放大滤波电路包括时间增益(time versus gain,TVG)调节电路与四阶带通滤波电路。ZYNQ 系列芯片实时控制模拟前端芯片时间增益调节,每路调节范围为0 ~-36 dB,共7 档,每档-(6±1)dB。带通滤波实现50 ~800 Hz的带通滤波,1 500 Hz 以上频带衰减20 dB 以上。每路放大电路放大量为(36±2)dB,在工作频段内放大增益起伏小于3 dB,短路噪声小于40 μV。
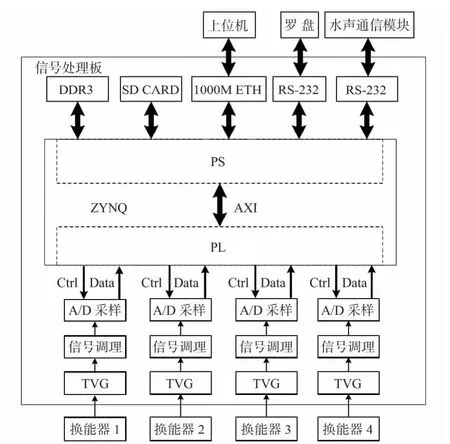
图3 信号处理板总体框架图Fig 3 Overall block diagram of signal processing board
ZYNQ 系列芯片进行4 路水听器声学信号同步A/D 采集,一方面将采集的数据存储至SD 卡,以便后续分析处理;另一方面,对采集的数据进行DFT,MVDR 测向和矢量测向等运算处理,将处理结果按照数据模式传输至水声通信模块,实现实时传输[4]。
水下远程监听声学系统采用电源管理模块实现供电管理,并负责对水下潜标电子舱部分和水声通信模块进行省电管理[5],在工作模式下,系统总功耗为2.0 W,省电模式下,系统总功耗为0.2 W。
2.2 数据传输流程
水下接收预处理前端接收4 路水听器的数据,后端将整理好的数据送至水声通信模块,并能接收水声通信模块发送的指令,进行工作模式选择,其数据流程框图如图4 所示。
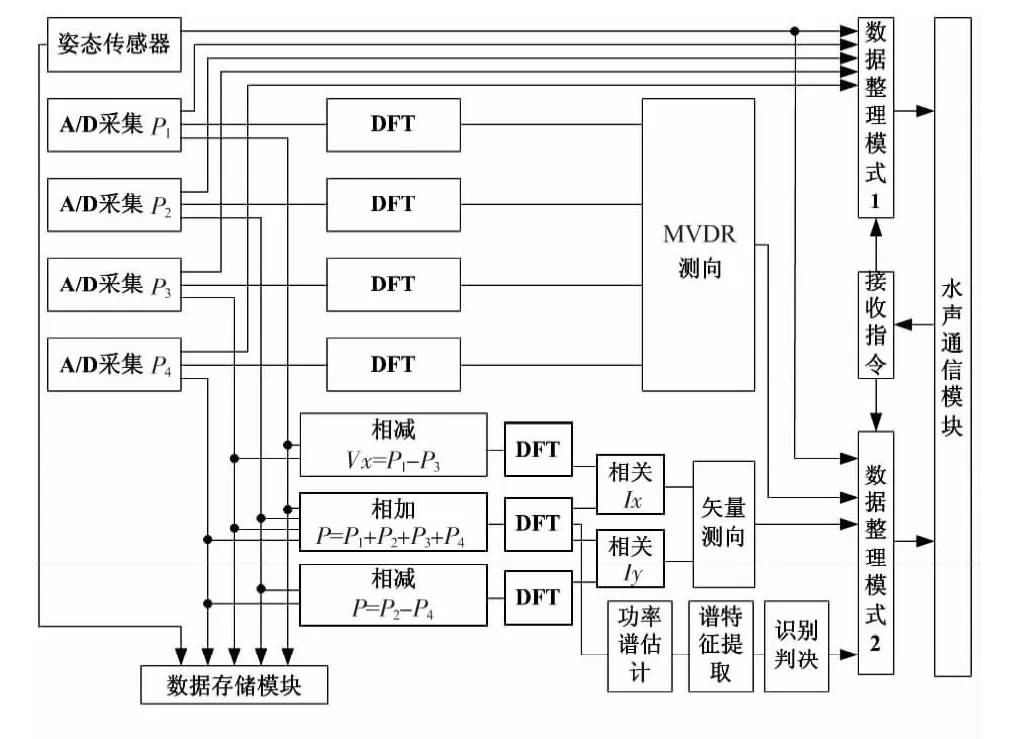
图4 数据流程框图Fig 4 Block diagram of data flow
2.3 DFT
DFT 如式(1)所示,其中,x(n)为各阵元接收信号的采样点,X(k)为频域离散谱线

2.4 MVDR 测向
MVDR 自适应波束形成测向技术,它是一种在输出端最小化干扰加噪声功率情况下使观察方向上信号无失真响应输出的高分辨力波束形成技术[6]。其空间加权向量可表示为


测向输出为

式中 fL,fH分别是处理频段的上限和下限,处理频段范围为50 ~800 Hz,fL=50 Hz,fH=800 Hz,处理频率间隔为Δf=0.98 Hz。
2.5 矢量测向
矢量测向方法是基于4 个正交布置的标量水听器[7],水听器结构如图5 所示。
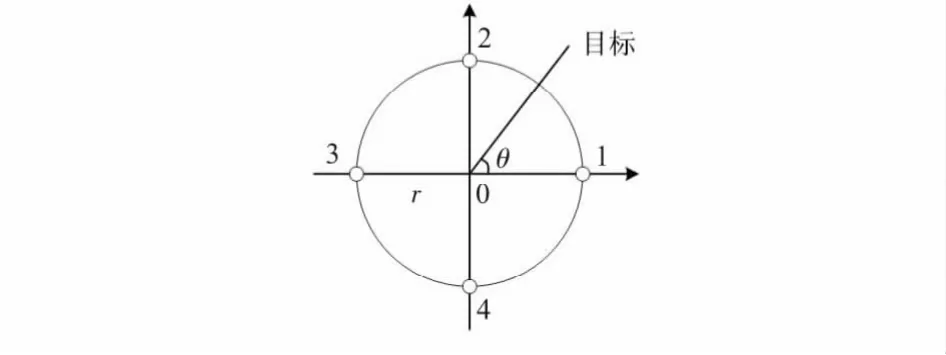
图5 目标与水听器位置关系Fig 5 Position relationship of target and hydrophone
在平面波传播假设条件下,4 路阵元输出信号可表示为

矢量水听器测向算法如下:
矢量水听器声压输出可表示为

矢量水听器水平方向上的振速响应可表示为

矢量水听器垂直方向上的振速响应可表示为

分别对上述3 个声压通道求DFT,然后在频域上分别求出指定处理频带内P,Vx的相关系数Ix和P,Vy的相关系数Iy,再进行方位解算矢量测向方法需结合象限判定,输出目标具体方位值。
3 测试结果
水下远程监听声学系统采用两种不同的测向方式,即MVDR 测向与矢量测向,实现目标方位的识别,从而提高目标识别的正确性。
3.1 MVDR 测向验证
在单目标监测仿真实验中,假设探测目标为静止目标,模拟空间单目标反射波束角度为α=45°,采用MVDR 算法实现测量方向,Matlab 仿真得到的波束形成结果如图6 所示。
假设探测目标为静止目标,模拟空间单目标反射波束角度为α=45°,采用常规波束形成算法得到的结果如图7所示。
仿真结果验证了MVDR 测向能有效识别目标所在的方向。同时,通过对比常规波束形成的结果可以发现,MVDR测向有效抑制噪声干扰,提取方向信息,指向性好。
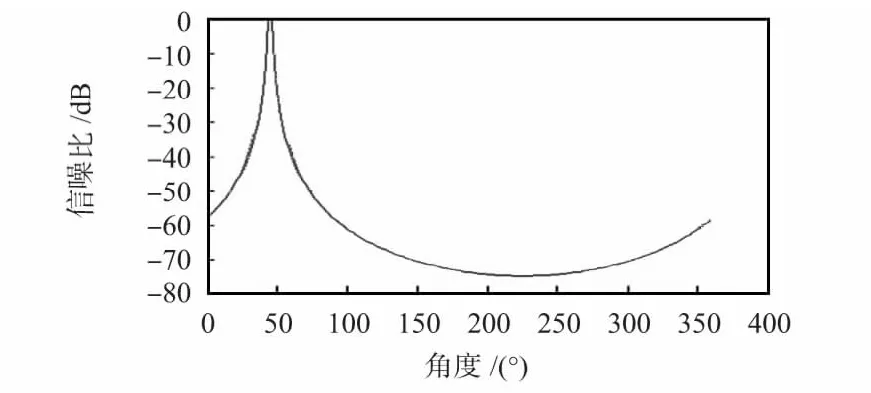
图6 MVDR 测向仿真结果Fig 6 MVDR estimation simulation result

图7 常规波束形成仿真结果Fig 7 Conventional beamforming simulation result
3.2 矢量测向验证
在单目标监测仿真实验中,假设探测目标为静止目标,模拟空间单目标反射波束角度为0°~90°,增量为1°,采用矢量测向算法实现91 个角度的测向,Matlab 仿真得到理论值,将理论值与实际值对比,结果如图8 所示。
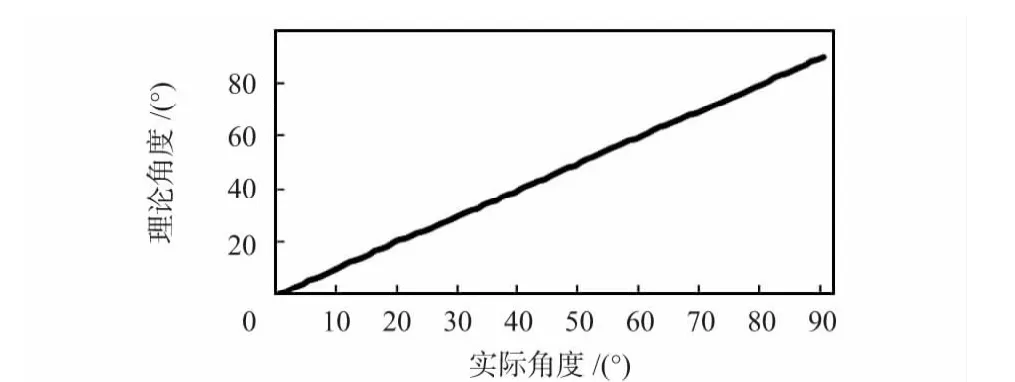
图8 矢量测向一致性结果Fig 8 Vector direction consistency result
对矢量测向曲线进行回归分析,得到线性回归关系为y=0.983 1 x,矢量测向的理论值与实际值的相关系数为R2=0.999 6,吻合度高。因此,矢量测向能准确识别到目标的方位。
3.3 功能测试
目标船沿线路作业时,换能器阵接收的信号的信噪比如图9 所示。
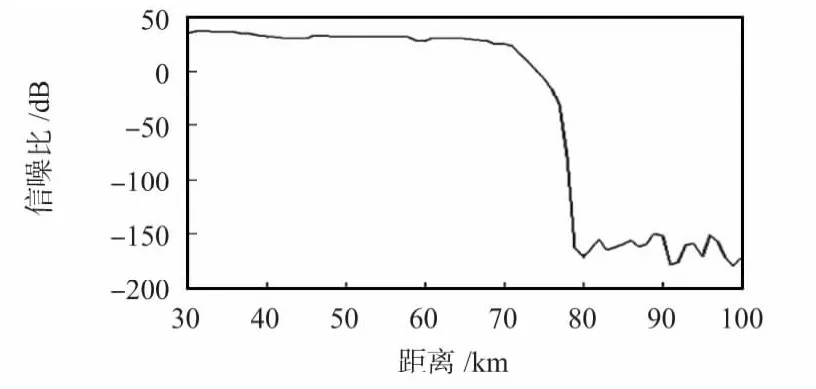
图9 目标在0 ~100 km 处接收的信噪比Fig 9 SNR of target in 0 ~100 km
由图9 可知,在实际远程监听中,对于70 km 以内换能器接收的信号有高的信噪比,能有效提取信号,满足测向距离指标0 ~50 km。
针对气枪声源信号进行录取实验的数据分析,其频谱图如图10 所示。
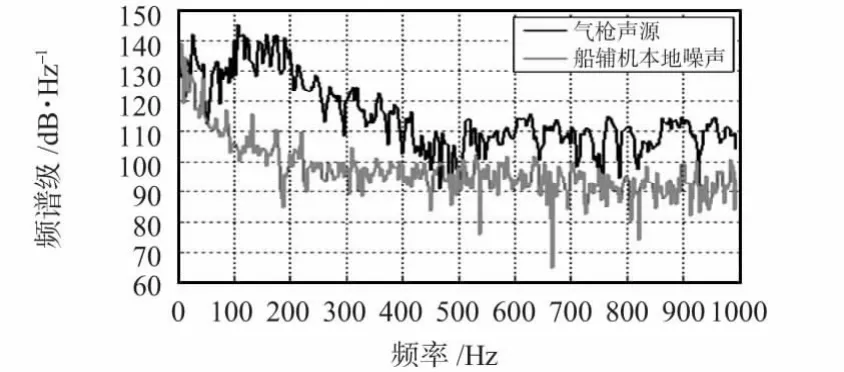
图10 单脉冲与噪声频谱图Fig 10 Single pulse and noise frequency spectrum
水下远程监听声学系统对位于不同方位的目标所产生的声源信号进行处理,得到不同的测向结果。将结果与实际方位比较,测向误差保持在2°以内,满足测向指标要求。
4 结束语
本文设计并实现了一种基于水声技术的非法作业船只远程监听系统。系统基于低功耗设计,对采集的数据进行DFT,MVDR 测量和矢量测向,从而实现对非法目标的远程监听。实际测试结果表明:系统的远程监听效果良好,并且系统功耗低,重量轻,能够适应复杂的海洋工作环境,发现非法海洋调查船、海洋资源勘探船作业等,对于海上维权具有广泛的应用前景。
[1] 施丹华.水声对抗技术发展及其概念拓展[J].舰船电子工程,2006,26(4):1-3.
[2] 唐 磊.我国海洋船舶业产业安全评价及预警机制研究[D].青岛:中国海洋大学,2011.
[3] 陈 川,王大宇.矢量水听器在水声通信系统中的应用[J].声学技术,2012,31(4):375-380.
[4] Ompton R T.A numerical pattern synthesis algorithm for arrays[J].IEEE Transactions,1990,38(10):1666-1676.
[5] 孟一聪.数字集成电路低功耗设计技术的研究及应用[D].北京:清华大学,2005.
[6] 吴亚军.MVDR 波束形成在噪声源识别中的应用[J].鱼雷技术,2011,19(2):101-103.
[7] 杨秀庭,孙贵青,陈新华,等.矢量水听器阵列MVDR 波束形成器的性能研究[J].应用声学,2007,26(1):8-15.
