采用稀疏特征选择的红外运动目标跟踪方法
2015-03-29王升哲王兵学陈咸志
雍 杨,王升哲,王兵学,陈咸志
(西南技术物理研究所,四川 成都610041)
1 引言
红外运动目标的跟踪在军事和民用上有着广泛的用途。对于天空背景的红外运动目标,由于背景比较简单,目标有比较高的对比度,用显著目标提取、背景建模等方法可以实现对目标的检测和跟踪。对于地面背景的红外运动目标,跟踪过程中遇到的困难则比较多,如目标对比度低、目标遮挡、目标外观变化等[1]。一些经典的目标跟踪方法如模板匹配法、光流法、卡尔曼滤波法、粒子滤波法等,都因为红外目标自身信息少且背景干扰多的原因难以获得满意的效果[2]。
近年来虽然又提出了一些比较好的目标跟踪算法,如2008年David提出的子空间增量学习跟踪算法[3],2009年Boris提出的MIL跟踪方法[4],同年,Xue Mei提出的Li跟踪算法[5],但这些算法的设计和测试都是基于可见光图像,所跟踪的目标也比较大,具有比较丰富的灰度层次和明显的细节。而红外图像依靠目标的热辐射成像,与可见光图像相比,红外运动目标有对比度低、边缘模糊、缺乏细节、信噪比低等特点,跟踪起来较可见光目标难度更大。
稀疏表达理论的提出有效解决了光照、姿态变化以及遮挡情况下的目标识别与跟踪问题[6-7]。但现有基于稀疏表示的跟踪方法都是用整个跟踪区域来构建超完备字典,并没有将背景从跟踪区域中剔除,因此背景部分对跟踪形成了干扰。对于运动目标,背景随目标运动变化显著,这种干扰就显得更为明显。本文在用稀疏表达对跟踪目标区域建模后,通过Logistic回归模型进行特征选择,对目标和背景进行分离以在最大程度上减少背景因素的影响,并用模板在线更新适应目标的外观变化,整个跟踪过程在粒子滤波框架下实现。实验证明本文提出的算法能很好地实现多种复杂场景下红外运动目标的稳健跟踪。
2 红外运动目标特性分析
红外运动目标的特性可以从两个方面来描述:灰度特征和运动特性。
从灰度特征方面来说,红外运动目标轮廓不清晰,灰度特性依赖于成像时的温度、湿度等条件,没有固定的特征模式。以车辆目标为例,不同的运动轨迹、不同的车辆类型使得目标区域的灰度呈现多模,如图1(a)中的目标1和目标2是两个运动方向相反的不同车辆目标,可以看到目标1呈现为亮目标特性,而目标2则呈现出暗目标特性。图1(b)中有三个不同车型的运动目标,它们虽然同方向行驶,但各自的灰度特征仍然有显著差别。此外,红外运动目标的灰度特性与背景的热辐射特性也有紧密关系,如车辆目标多行驶在水泥路面上,其热辐射非常强烈,因此路面在经过一段时间的太阳照射后在红外图像中也呈现为高亮度特性,使得车辆目标与道路的分界线模糊,对跟踪造成困难。远距离的海面舰船目标则通常呈现为与背景的灰度差异很小的弱目标,如图1(c)中位于海天线附近的舰船目标,就只有发动机部分具有较高的亮度。
红外运动目标的运动特性与其他模式图像中的运动目标相仿,表现为目标具有一定的运动方向,有自己的运动轨迹。运动特性可以用于目标位置预测、真假目标辨别。
因此,红外运动目标没有稳定、显著的亮度特征和梯度特征,且在运动过程中会出现目标遮挡、目标外形变化等复杂情况,因此,要解决好红外运动目标的跟踪问题,需要引入具有更强学习能力和更好适应能力的方法。

图1 不同运动目标的红外特性Fig.1 The infrared characteristics of different targets
3 基于稀疏特征选择的运动目标跟踪
3.1 稀疏表达原理
根据稀疏编码模型,任何一幅图像都有y∈RM可以进行稀疏表达。设字典矩阵Φ由一组线性独立的基矢量组成:Φ=[1,2,…,N]∈RM×N。候选目标向量y∈RM,则y可以用字典Φ的各个列向量线性表示,即:

式中,a∈Rm是目标的稀疏表达系数向量,考虑现实情况中信号中不可避免有噪声污染,目标向量很难得到完美重构,因此在上式中添加了e表示真实图像与重构图像的残差。稀疏表达就是用尽量少的线性向量表示y,式(1)中Φ与y是已知的,需要求的是图像在字典中所对应的系数向量a,因为字典矩阵Φ是过完备的,没有唯一解,可以通过最小化重构误差来求解该系数:

式中,参数λ控制着系数向量和噪声的稀疏程度,λ增大则系数的稀疏度增大。式(2)中的l0范数最小化问题是NP-hard问题,计算效率极低,根,当式(2)的解足够稀疏,则可以将它写为:

即用l1范数方法代替l0范数,将问题转变为一个凸优化问题,可以用多种方法进行求解。
3.2 运动目标特征提取
目前确定目标初始区域都是用一个矩形框来划定感兴趣目标的,但目标的形状往往是不规则的,也就是说目标初始区域内必然包含了背景成分。对于静止目标或目标运动幅度不大的情况,初始区域中的背景成分对跟踪的影响还不是很明显。但对于运动目标来说,在运动过程中目标周围的背景是不断变化的,特别是目标运动比较快时,初始字典矩阵的更新落后于目标运动速度,用字典矩阵中的基矢量重构得到的图像与真实目标区域的误差会不断增大,最终导致跟踪逐渐向背景漂移。如果能够对初始区域进行分析,得到最能代表目标特性的特征位置,就能在一定程度上将背景分离开来,从而降低背景对运动目标跟踪的影响。进行运动目标特征选择的另一个显著优点,是对运算效率的提高,即特征选择后参与计算的矩阵变小,可以提高计算效率。
目前特征选择方法种类很多,Logistic回归模型是一种应用广范的分类方法,Liu Jun等人提出了用Lassplore方法解大规模的稀疏Logistic回归问题[8],进而进行特征选择。本文采用Logistic回归模型进行特征选择,其原理是通过学习找到一个合适的能量函数,并使用损失函数对能量函数的好坏进行评价,通过最小化损失函数搜索到合适的能量函数,从而得到最佳的特征权重值。

图2 正负样本采集Fig.2 Positive and negative samples
特征选择需要输入多个样本进行学习,如图2所示,正样本集通过对初始目标区域进行一定的仿射变换后得到,负样本集则在初始目标区域之外的图像中进行采集。能量函数的使用可以描述如下:
假设样本集为S,含有n个样本S={(b1,c1),(b2,c2),…,(bn,cn)},其中bi∈Rm为样本,ci=为每个样本的类标签,针对该模型定义一个能量函数来度量类标签bi与样本ai相一致的程度。能量函数的值低,说明二者一致性高,反之二者一致性低。因此,Logistic回归模型中的学习过程就是搜索合适的能量函数以找到与样本ai一致性最高的bi,也就是理想输出。
定义Logistic回归模型为:

其中,Prob(c|b)是类标签的后验概率,w为特征的权重矢量,d为截距。
可以用经验期望值表示样本bi的对数Logistic损失函数,并且为了避免监督学习中特征维数较高而样本数不足时容易产生的过学习问题,加上了一个L2正则化项,最终的损失函数定义如下:

在确定损失函数的形式后,通过最小化损失函数便可以得到合适的能量函数,从而获取最佳的参数矢量w,即:
式中,β是一个可调的参数。公式(7)可以通过梯度下降来寻找其最优权重参数矢量w,本文通过调用稀疏学习库SLEP中的函数予以求解。
求到的权重矢量w中,样本中背景或者部分不显著特征对应的系数均为0,也就是说这一部分像素点可以不参与求解稀疏编码系数的计算,为此将实时图像中的多个采样样本和稀疏字典矩阵向权重矢量w投影,即:

其中,y'和Φ'的维数都小于原来的维数,这样可以进一步求解稀疏系数向量的计算效率。以稀疏字典矩阵Φ为例,原始大小为M*N,经过投影后变为M'*N,M'的大小就是特征权重矢量w中不为零的元素个数。由此可以看出,目标特征提取的越精准,就越能避免背景成分对跟踪算法的影响,并且可以减小计算量。
图3是采用两个典型目标进行特征选择的结果,这两个例子充分体现出了红外图像目标成像缺乏纹理特征、边界模糊的特点。图3(a)、(b)、(c)中的灰度图是目标样本,二值图是特征选择后的权值图,其中为1的像素点为目标,为0的像素点是背景。图3(a)中的车辆目标比较显著,特征选择后目标与背景分离的比较好;图3(b)中的车辆目标有一部分与背景灰度差别很小,人眼难以区分,经过特征选择后也还得到了不错的分离结果;图3(c)中的舰船目标也选择出了目标最显著的特征。通过对不同情况下的红外运动目标实验证明,Logistic回归模型通过对多个正、负样本的学习,能够找到一个比较合适的特征权重值,对目标和背景进行较好的区分。
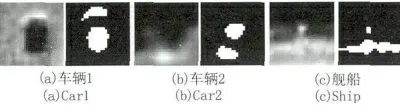
图3 特征选择结果Fig.3 Feature selection results
3.3 字典矩阵在线更新
现有的在线学习跟踪方法多采用固定间隔对目标模板进行更新,如文献等[3]、[5],这些文章中跟踪的目标都比较大,细节也比较丰富,因此初始目标模板大多能比较好的突出目标本身的特征,包含的背景成分不多,采用固定间隔的更新方法能取得比较好的效果。但这种思路对于本文中的红外运动目标来说却不太适合,主要是目标比较小,目标模板中包含的背景成分在经过特征选择后也不能被完全分离,跟踪过程中背景变化很快,会导致当前时刻目标区域上提取的特征向量与字典矩阵中的特征向量存在差异,从而导致跟踪性能的逐渐下降。因此,本文采用每帧更新的方法来适应运动目标及目标背景的快速变化。需要更新的有三部分:
1)正样本:初始化跟踪时根据目标的仿射变化产生了若干个正样本,在每次更新过程中找出与当前跟踪结果差别最大的样本进行替换,这样可以将目标的最新外观模型加入到正样本集中;
2)负样本:在得到每帧的跟踪结果后,在目标周围一定范围内进行采样,更新全部负样本;
3)特征权重矢量w:在目标正、负样本集都进行了更新之后,需要重新进行特征选择,即通过计算公式(6)获取新的特征权重矢量w。
3.4 算法小结
本文采用粒子滤波作为跟踪算法的框架,算法步骤可以总结如下:
输入:视频图像It,上一帧目标位置Xt-1,字典矩阵Φ,粒子数量N。
输出:当前帧跟踪到的目标位置Xt。
1)字典矩阵初始化。在第1帧图像中根据预先确定的跟踪区域选定初始模板,并对该模板进行不同参数的仿射变换产生n1个正样本,在初始模板周围随机选择n2个负样本。
2)特征选择。建立Logistic能量损失函数,对正样本集和负样本集进行学习,得到最佳特征权重矢量w;
3)粒子生成。以Xt-1为均值,δ为方差,按高斯分布生成N个粒子即N个候选目标的仿射变换参数;
4)利用N个仿射变换参数在图像中生成N个候选目标图像,归一化并拉伸为向量,记做yit;
5)用公式(7),将yit和字典矩阵Φ向特征权重矢量空间投影,得到y'和Φ';
6)用公式(8)计算l1最小化问题,得到稀疏编码系数a;
7)根据稀疏编码的系数向量a重构图像,并以重构误差最小的候选样本为当前跟踪结果;
8)更新正样本集、负样本集和字典矩阵,进入步骤(2)。
4 实验结果与分析
为验证本文算法的有效性,选择了典型环境下的五组红外运动目标视频进行测试,并与近年来提出的子空间增量学习跟踪方法(IVT)、L1跟踪方法进行了比较。在实验中,设粒子滤波中目标仿射运动变量为P=(xt,yt,ηt,s1t,s2t),其中xt、yt表示t时刻目标在x和y方向的平移,ηt表示目标旋转角,s1t和s2t表示目标在x和y方向的尺度变化。
视频Car1的跟踪对象为公路上行驶的车辆,由于拍摄角度的原因,目标上半部分与背景区别很小,如图3(b)中的灰度图所示。跟踪结果如图4(a)所示,在第122帧目标与一个对面驶来的亮目标交会,三种跟踪方法都没有受到影响,第382帧目标追上了同向行驶的另一车辆,IVT方法和L1方法受到了另一车辆目标的影响,发生跟踪漂移,到了第416帧,只有本文方法能继续对目标进行跟踪,另两种方法均已跟踪失败。

图4 三种方法车辆跟踪效果对比Fig.4 Comparison of three algorithms for vehicle tracking
图4 (b)中,视频Car2对灌木丛中行驶的车辆进行了跟踪。由于地表植被丰富,目标的对比度比起在公路上行驶的车辆要低很多,且一些较高的植物形成了遮挡。在第43帧中三种跟踪方法对目标跟踪稳定,之后由于成像平台大幅向右移动,到了第57帧时IVT方法和L1方法在跟踪中产生了滞后,本文方法仍对目标保持了稳定跟踪。第384帧地表植物对目标形成了遮挡,IVT方法和L1方法都没有能抵抗对运动目标的遮挡,跟踪发生显著漂移,到了第508帧,只有本文方法仍然对目标保持了正确跟踪,另两种方法均已失败。
上面两组实验表明,本文提出的跟踪算法在对红外运动小目标的跟踪过程中,通过对正负样本集的监督学习,对目标和背景进行了区分,在很大程度上减弱了跟踪过程中背景对目标的影响,因此对机动性强、有部分遮挡、有相似目标干扰等复杂背景的红外运动目标,本文算法的跟踪都是稳定有效的。
图5是另一些典型场景的跟踪结果。图5(a)是对自然场景中的卡车目标进行跟踪,该目标由远及近行驶,出现了明显的尺度变化,从第326帧可以看出目标的膨胀变化,目标运动过程中成像平台有比较大幅度的移动,因此目标在图像中有大尺度的位移,并且图像产生了明显的模糊,如第401帧所示,本文算法在目标膨胀、目标大尺度位移、图像模糊等情况下实现了稳定跟踪;图5(b)是对海面的舰船弱小目标进行跟踪,此视频中目标成像对比度很低,且目标行驶在海面上,受海面波浪的涌动上下起伏,形状也有所变化。本文提出的算法能对该视频序列进行持续稳定跟踪;图5(c)的跟踪对象是另一个场景下的海面舰船小目标,该视频序列中舰船目标有一个掉头行驶的过程,因此外形出现明显变化,如第290帧、662帧所示,本文算法能在目标形状及灰度发生改变的整个过程都保持稳定跟踪。

图5 不同场景红外运动目标跟踪效果Fig.5 Tracking results of infrared moving targets in different scenes
为了比较本文算法与IVT方法和L1跟踪方法的跟踪精度,本文计算了跟踪目标的中心位置与手动标记的真实中心位置之间的欧式距离,用于衡量三种算法的跟踪精度。为了显示得更为清楚,每隔5帧比较1次,如图6所示。可以看到,在三种不同环境的车辆目标跟踪测试中,本文算法的跟踪精度都是最高的。

图6 三种跟踪算法跟踪误差对比Fig.6 Tracking error comparison of three algorithms
表1列出了三种算法对本文测试的视频的平均处理时间,本文算法参与求解稀疏系数的变量维数均大大小于L1算法,因此运算效率比L1跟踪方法高,但特征选择部分需要进行多次迭代,因此比IVT方法低。
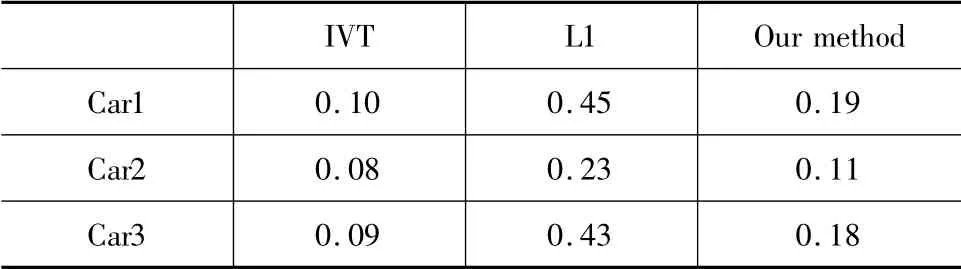
表1 三种算法平均运算时间比较Tab.1 Average operation time comparison of three algorithms s
5 结束语
本文提出了一种采用稀疏特征选择的红外运动目标跟踪算法,在稀疏表达的基础上,通过对特征选择分离跟踪区域内的目标和背景,有效削弱了背景成分对于运动目标跟踪的影响并提高了运算效率,通过对正负样本的在线更新,增强了算法对目标外观变化的适应性。对多个自然复杂场景中的红外运动小目标视频的跟踪结果表明本文算法能对目标进行持续稳定跟踪,并且有跟踪精度高、计算速度快的优点。
[1] PENG Chen,CHEN Qian,QIAN Weiian,et al.Infrared moving targets tracking under complex ground scene[J].Infrared and Laser Engineering,2013,42(6):1410-1415.(in Chinese)彭晨,陈钱,钱惟贤,等.复杂地面场景下的红外运动目标跟踪.红外与激光工程[J].2013,42(6):1410-1415.
[2] TANG Zhengyuan,ZHAO Jiajia,YANG Jie,et al.Infrared target tracking algorithm based on sparse representation model[J].Infrared and Laser Engineering,2012,41(5):1389-1395.(in Chinese)唐峥远,赵佳佳,杨杰,等.基于稀疏表示模型的红外目标跟踪算法[J].红外与激光工程,2012,41(5):1389-1395.
[3] David A R,Jongwoo L,Ruei-Sung L,et al.Incremental learning for robust visual tracking[J].International Journal of Computer Vision,2008,77(1-3):125-141.
[4] Boris B,YANG M H,Serge B.Visual tracking with online multiple instance learning[C].CVPR,2009.
[5] Xue M,Ling H B.Robust visual tracking using L1 minimization[C].Proc of IEEE International Conference on Computer Vision,2009:1436-1443.
[6] John W,Julien M,Guillermo S,et.al.Sparse representation for computer vision and pattern Recognition[C].Proceedings of the IEEE,2010,98(6):1031-1044.
[7] Zhong W,Lu H C,Yang M H.Robust Object tracking via sparsity-based collaborative Model[C].International Conference on Computer Vision and Pattern Recognition,2012:1838-1845.
[8] Liu J,Chen J H,Ye J P.Large-scale sparse logistic regression[C].The Fifteenth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining,2009.
