基于显著性与尺度空间的红外弱小目标检测
2015-03-29辛云宏
周 姣,辛云宏
(陕西师范大学物理与信息技术学院,陕西 西安710119)
1 引言
红外探测系统已被广泛地应用于红外警戒领域中,准确快速地识别出来袭目标,是红外探测技术的核心所在。由于红外目标所处环境信噪比低,对比度差[1]。所以,红外目标检测是一个挑战性较大的关键课题。目前,国内外学者针对此问题做了诸多研究:如文献[2]通过频域相关系数及贝叶斯概率检测红外目标,该方法可准确地识别出强背景下的目标,但若初始化位置选取不恰当将会影响检测结果;文献[3]利用多子图通道的全局与局部显著性;接着计算三种颜色空间内的显著区域图;最后通过均值优化及高斯平滑,得到最终的显著目标图,此方法能清晰的凸显目标,对边缘的显著检测较为突出,不足的是算法计算量较大;文献[4]在自下而上的模式中加入图像的频域幅值信息以及结合多尺度熵来重构显著目标图,以此来达到目标检测,该方法检测效果佳,但工程实时性不好;文献[5]利用尺度空间滤波来优化骨骼细化算法,该方法抗噪性稳健且自适应强,有效地提高了预处理速度;文献[6]采用改进的二维自适应最小均方滤波窗口获得预测背景,再利用背景减法差分出红外小目标,该算法有较强的背景抑制能力,可在调节自适应尺度窗口时较为繁复;文献[7]提出了适用于目标环境信息变化的检测算法,该方法能有效地检测出无先验知识的目标,不足的是对多目标检测效果不好;文献[8]先利用梯度算子来处理图像,再将其小波分解,用多尺度互能量交叉函数进行背景杂波抑制并通过区域生长来分割出红外目标,此方法检测效率高,可小波算法本身比较复杂;文献[9]提出了利用曲率极大值,定义了hat-transform描述符并建立其尺度空间的算法,其目标识别率较高,但程序耗时较长;文献[10]利用多步长梯度融合三次确认法来检出目标,该方法简单有效,不足的是阈值选取是靠经验来定;文献[11]提出RD-LBRF滤波结合拉普拉斯尺度空间理论与最优化信杂比模型的方法,该算法可有效地抑制背景杂波,具有较低的误检率;文献[12]提出多结构形态学滤波和二维熵的检测方法,该算法可有效的检测出前景目标。
基于以上分析,本文提出了一种基于显著性与尺度空间的红外弱小目标检测算法。不同场景下的实验结果表明,所提方法可有效检测出红外弱小目标,且运算简单,工程实时性好。
2 目标模型和算法流程
2.1 红外小目标模型
红外弱小目标,顾名思义就是在红外图像上呈现为亮度较弱,所占尺寸与面积极小的点状光斑,其所含像元数目少,缺乏结构、形状等信息。一幅含有红外弱小目标的图像依照点扩散原理,可将其目标模型表示为[13]:

其中,(xm,ym)为目标的中心坐标;d是目标的直径;σ为目标扩散尺度函数;Iv为目标的峰值强度。当目标的中心坐标确定后,目标的灰度峰值也随之平稳。
2.2 算法流程
一般来讲,红外小目标的背景通常为云团、海面等大面积变化缓慢的中低频成分,与高频成分的目标之间具有显著的差异。基于此特性,我们就先从图像差异问题入手,通过显著性区域检测来预处理原始红外图像,得到潜在的目标范围,再运用DoG算子生成的尺度空间来准确定位红外小目标。算法流程图如图1所示。
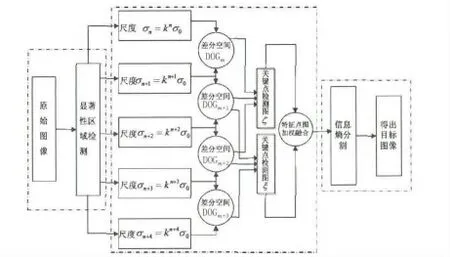
图1 算法流程图Fig.1 Flowchart of the algorithm
3 算法描述
3.1 显著性检测
众所周知,红外弱小目标通常是一个亮斑或亮点,其本身是显著的。同时,图像中的背景杂波区域,也是显而易见的。鉴于此,就先将红外图像的显著性区域包括红外目标及其高频背景等干扰检测出来,然后在凸显出来的显著区域内进行杂波抑制与红外小目标的定位。图像的显著检测算法众多,本文将用频域残差法[14]来实现显著区域的提取。由于人眼系统对突出变化的敏感,因此,变动的区域就是本文所需的显著区域。若输入图像为I(x,y),那么,本文图像显著区域S(x,y)的检测过程如下表示:
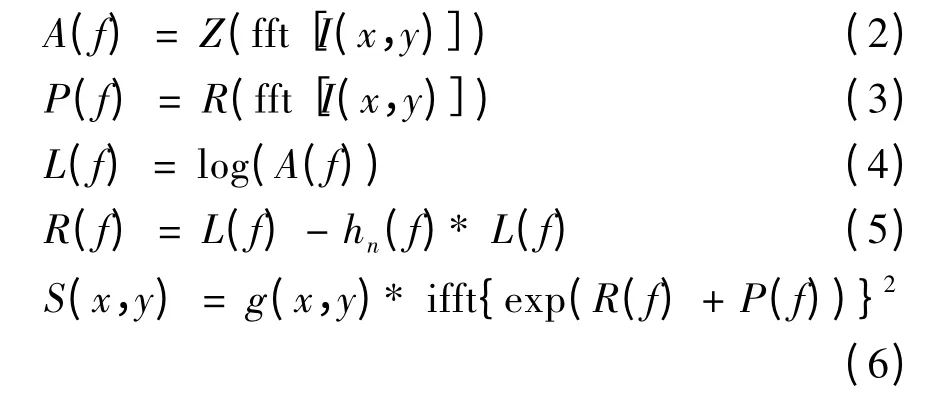
其中,A(f)表示为振幅谱;P(f)为相位谱;L(f)为log振幅谱;R(f)为谱残差;S(x,y)为显著图;Z、R分别表示为在频域中复数的模与相位;fft指的是傅里叶变换;ifft为反傅里叶变换;log,*表示对数与卷积运算;hn(f),g(x,y)表示均值与高斯滤波模板。
频域残差法仅用傅里叶变换与反变换,及高斯模糊滤波等简单步骤就可得到图像所需要的显著区域,其算法易懂,运算方便,由该方法所得的预处理后显著性区域效果如图2所示。
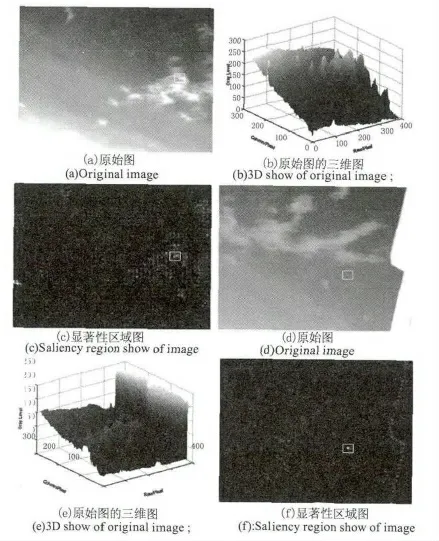
图2 预处理后的显著性区域效果图Fig.2 Effect of salient region after preprocessing
图2 中(a),(d)是原始图,(b),(e)是其三维图,(c)图像经上述步骤预处理后,潜在目标区域被检测到,但同时也将图像中的云团当做了前景目标误检了出来;而(f)图经显著性检测后,不仅缩小了目标的范围,还将云层背景杂波也滤除,可不足的是右侧干扰很强的建筑物部分也被当做显著区域凸现。因此,要准确无误地识别出目标,就必须将预处理后的图像通过尺度空间理论,做进一步地目标检测。
3.2 基于尺度空间的红外目标检测算法
3.2.1 DoG尺度空间
尺度空间理论[15]的基本原理是用不同参数的高斯核函数对图像进行不同尺度下的变换,从而获得多尺度的图像序列[16]。DoG尺度空间,便由多尺度下的DoG算子与图像卷积生成。那么,一帧原始图像的DoG尺度空间可表示为[17]:

其中,σ为尺度空间的缩放因子;n为尺度空间的层数;DoG(x,y,σ)表示为可变尺度是σ的DoG算子与原始图像的卷积,即:
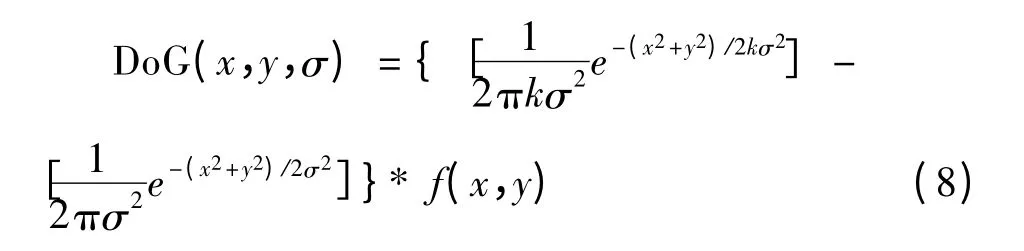
式中,f(x,y)为原始红外图像;*为卷积运算符;(1/2πσ2)e-(x2+y2)/2σ2是二维高斯函数。对于本文小目标而言,相邻尺度间的大小直接影响了生成尺度空间的连续性,因此令相邻尺度因子σ间的关系为σn=knσ1。其中,初始尺度因子σ0的最小值为0.7,k取值为1.2,所生成的尺度空间数n的取值为1~8,那么可得出σn的取值范围是[0.70 0.94 1.21 1.45 1.99 2.09 2.51 3.01]。
3.2.2 真实目标检测
在完成上述步骤后,通常会选择DoG尺度空间的某个关键像素点与8个临近像素点以及上下相邻尺度下的2×9个像素共计26个点来进行比较,若该关键像素点在此尺度下有极大值点,那它就为潜在目标点。因此,DoG尺度空间的极大值点检测可用下式来表示:

但因为在多尺度下,目标局部细节会随着尺度增大而减少,且在使用高斯核函数滤波时,部分目标像素会被滤除。所以,为了保留更多的目标信息,本文将采取加权融合多尺度空间特征图像的方法。若DoG特征图用Gs表示,而令每三层DoG尺度空间生成一幅特征值点图像,再设融合权值为w,那么多尺度空间融合的目标图Tn可用公式(10)来表示:

在本文的仿真实验过程中,我们将取Scale的范围为8个尺度下,一共可生成7层DoG尺度空间,所生成的特征图共5幅,图像的融合系数为[7 6 5 4 3]。
3.3 最终目标定位
红外目标的准确检测是需要对所得到的全部目标进行正确验证的。文中采用Renyi熵对图像做阈值分割。定义图像的前景像素级区域为T,背景为B,q为熵的阶数。若设目标与背景的概率为:Pi(T)、Pi(B),那么Renyi熵表示为[18]:
式中,k(0~255)为图像当前所取像素灰度级,若有t的取值能使式(13)成为最大值时,就会得到最佳阈值,那么t即为图像分割阈值,而经阈值处理后,前景目标凸显。

4 实验结果
本文实验部分使用了两组红外视频序列,序列1的分辨率为288×384,序列2为288×288。算法采用Matlab语言编程,实验中的高斯模板大小为5×5,信息熵分割时的q值取为2。文中2个序列图中的小目标作为被检测对象,为了突出本文优越性,将与文献[10]和[12]中的多步长梯度算法及多尺度下的形态学方法做了对比分析。
图3中,(a)图目标上方有云团围绕,右侧有建筑物干扰;(b)中斜建筑的起伏较为明显,目标与背景对比度低;(c)呈现为断断续续的小白点是建筑物边缘被当做显著区域检测出来;(d)是文献[10]算法而出的效果图,建筑物部分不能很好的被消除,且由于阈值选取原因,目标会随着阈值大而像素点减少,阈值小又出现太多的虚警点;(e)是文献[12]的结果,目标虽然被凸现出来,但在图上仍然还有噪声点存在;由(f)图可看出,本文能抑制背景杂波,较为容易的检测出目标,且结果图像很清晰。
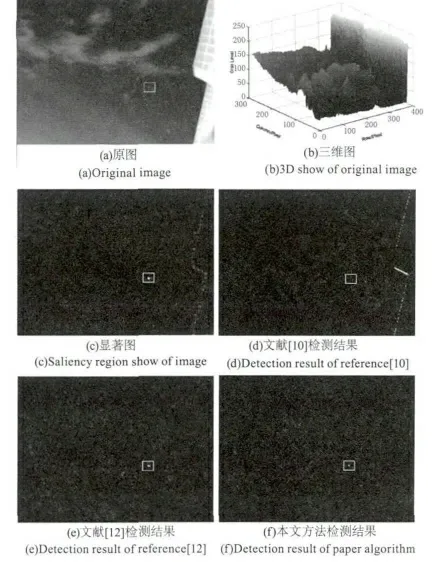
图3 序列1的实验结果Fig.3 Experimental results of video 1
如图4所示,原始图(a)中有三个目标,尤其是位于中间的目标被大量云团围绕;(b)是其三维图;(c)图的显著结果表明图像的左下角处有背景像素被凸显出来;(d)与(e)是文献[10]和文献[12]的检测结果图,在用文献[10]的方法来处理多目标时,图中间的部分目标像素被漏检;而在(e)中,前景像素周围出现了过多的伪目标点;(f)图是本文方法,三个目标被识别出来,且去噪去杂方面比较彻底,相比文献方法而言,具有较强的实际意义。
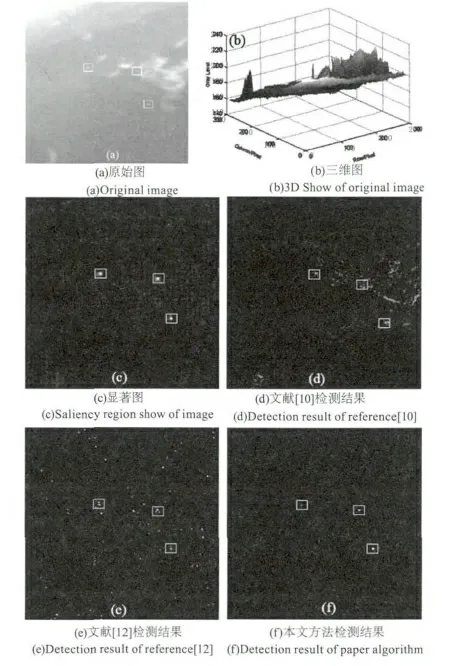
图4 序列2的实验结果Fig.4 Experimental results of video 2
综上所述,本文算法在有效检测出目标的基础上,使周围的背景杂波得到抑制,并优于文献[10]和文献[12]算法。由于以上的定性分析是靠主观辨识,故以文献及本文算法所得单目标预处理后灰度值以及多目标图像像素点SCR值来作定量对比。
表1是图3中,单目标原始图像经预处理后,目标所占6个像素点的灰度值。在目标的显著性检测中,图像经傅里叶变换可清晰的提取出目标轮廓,其频域是图像灰度剧烈变化的指标,而视觉对目标的识别是由局部灰度决定[10],所以目标的灰度值越大,目标越易凸显。总的来说,本文方法所得的目标灰度值优于文献方法,对于目标检测具有较强的实际意义。
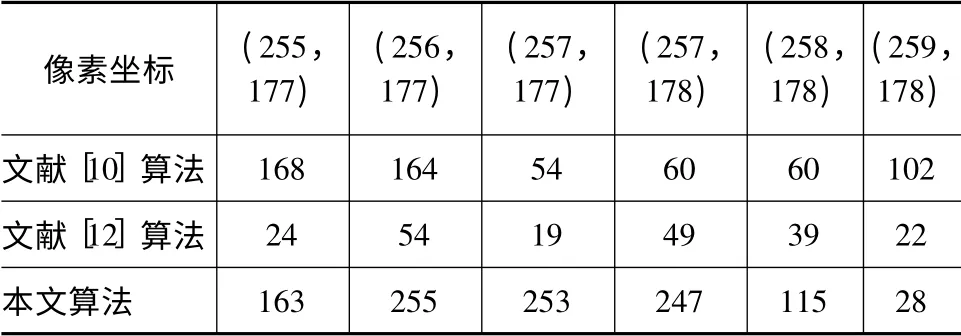
表1 各像素点灰度值对照表Tab.1 gray value comparison of each pixel
表2是图4中多目标像素点信杂比对照表,由表2知,本文目标的信杂比明显高于原始图像与文献[10]和文献[12]梯度及形态学方法的信杂比,这是因为图像在尺度空间的平滑滤波处理后,抑制了背景杂波,所以本文方法在红外弱小目标的检测上具有一定的优势。

表2 各像素点信杂比对照表Tab.1 SCR comparison of each pixel
5 结束语
本文提出了基于显著性与尺度空间的红外弱小目标检测算法,该方法先采用频域残差法缩小目标范围,然后将预处理后的图像进行尺度空间扩展,之后对生成的DoG尺度空间实行关键点检测,再加权融合特征点图,最终通过信息熵分割出准确的前景目标点。该方法不但能有效的检测出复杂背景下的红外弱小目标,还能有效的增强图像信杂比。本文在后续方面,会将其与红外小目标跟踪结合起来,期望能达到好的效果。
[1] Charlene E C,Jerry S.Optimization of point target tracking filters[J].IEEE Trans.Aerosp.Electron.Syst.,2000,36(1):15-25.
[2] JShaik,K M Iftekharuddin.Detection and tracking of targets in infrared images using Bayesian techniques[J].Optics&Laser Technology,2009,41(6):832-842.
[3] Ali Borji,Laurent Itti.Exploiting local and global patch rarities for saliency detection[J].IEEE Conference on Computer Vision and Pattern Recognition,2012:478-485.
[4] Li J,Martin D L,An X J,et al.Visual saliency based on scale-space analysis in the frequency domain[J].IEEE Transactions on Pattern Analysis and Machine Inteligence,2013,35(4):996-1010.
[5] Houssem Chatbri,Keisuke Kameyama.Using scale space filtering to make thinning algorithms robust against noise in sketch images[J].Pattern Recognition Letters,2014,42(4):1-10.
[6] Tae-Wuk Bae,Fei Zhang,In-So Kweon.Edge directional 2DLMSfilter for infrared small target detection[J].Infrared physics&Technology,2012,55(1):137-145.
[7] Cattleya Duanggate,Bunyarit Uyyanonvara,Stanislav S.Object detection with feature stability over scale space[J].J.Vis.Commun.Image R.,2011,22(4):345-352.
[8] Chengjun L,Ying W,Zeling S.A small target detection algorithm based on multi-scale energy cross[J].Proc IEEE Int Conf Robotics Intell Syst Signal Process,2003,2:1191-1196.
[9] A C Jalba,M H F Wilkinson,J B T M Roerdink.Shape representation and recognition through morphological curvature scale spaces[J].IEEE Transactions on Image Processing,2006,15(2):331-341.
[10]WAN Ming,ZHANG Fengming,HU Shuang.Novel infrared dim and small target detection algorithm based on multi-scale gradient[J].Acta Optica Sinica,2011,31(10):98-103.(in Chinese)万明,张凤鸣,胡双.基于多步长梯度特征的红外弱小目标检测算法[J].光学学报,2011,31(10):98-103.
[11]Sungho Kim,Joohyoung Lee.Scale invariant small target detection by optimizing signal-to-clutter ratio in heterogeneous background for infrared search and track[J].Pattern Recognition,2012,45(1):393-406.
[12]WANG Yingying,ZHANG Yongshun,HE Ping.Research on IR target-detecting method based on morphology and entropy[J].Laser&Infrared,2012,42(5):513-517.(in Chinese)王莹莹,张永顺,何苹.基于形态学和信息熵的红外目标检测算法[J].激光与红外,2012,42(5):513-517.
[13]JPArdouin.Point source detection based on point spread function symmetry[J].Opt.Eng.,1993,32(9):2156-2164.
[14]Hou X D,Zhang L Q.Saliency detection:a spectral residual approach[J].IEEE Conference on Computer Vision and Pattern Recognition,2007,800:1-8.
[15]D GLowe.Distinctive image features from scale-invariant keypoints[J].Int.J.Computer Vision,2004,(60)2:91-110.
[16]Tony Lindeberg.Feature detection with automatic scale selection[J].Int.J.Computer Vision,1998,30(2):79-116.
[17]K Mikolajczyk,C Schmid.Indexing based on scale invariant interest points[C].Eighth IEEE International Conference on Computer Vision(ICCV),2001,1:525-531.
[18]Leila Golshani,Einollah Pasha,Gholamhossein Yari.Some properties of Rényi entropy and Rényi entropy rate original research article[J].Information Sciences,2009,179(14):2426-2433.
