基于纹理特征驱动AdaBoost算法的海面场景分类
2015-03-29金代中高志峰
戴 军,金代中,高志峰
(西南技术物理研究所,四川 成都610041)
1 引言
随着红外探测器技术的快速发展,红外成像系统在反舰精确制导武器上得到了广泛地应用。在超低空飞行的反舰制导武器中,海面背景在红外成像瞬时视场内占据了较大比例,是影响目标识别的主要因素。海面背景的红外辐射特性与风、太阳、空气湿度等多种自然条件有关。由于这些条件的无规则变化使得海面背景的红外成像特性的复杂性远大于舰船目标自身,直接关系到红外成像制导或包含红外制导的复合制导系统的探测、识别及抗干扰能力。
目前,在海面目标检测、海天线提取等领域研究较多,常用目标检测算法都是在一定干扰条件下,完成对目标的检测,很难适应强干扰的海面背景。当海面背景形成强干扰时,检测的虚警率大幅度提高,目标探测效果显著下降。
基于海面红外图像纹理特征,利用Adaboost算法训练强分类器,构建二叉决策树,实现对海面场景的分类。实验证明,该方法适应性广、分类效果好,能提高红外成像系统对场景的感知能力,为目标检测算法的选取,红外成像系统使用边界以及复合制导的综合决策提供依据。
2 海面场景红外成像分析
通过对大量外场试验数据进行统计分析,根据对目标识别跟踪效果的影响程度,将海面场景分成三类:强亮带干扰纹理、弱干扰纹理、干净纹理。其中强亮带干扰纹理对目标的自动识别和跟踪影响较大,干净海面背景对目标自动识别最有利。图1为三类典型的海空背景红外图像。
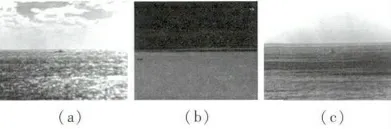
图1 典型海空背景红外图像
当太阳位于一定天顶角时,由于海面的镜面反射现象,会在海面形成一定区域的海面亮带。当红外探测器位于一定的观测角度,就会形成很强的海面干扰图像。此时的海面背景由大量起伏不定的高亮斑点组成,斑点的大小、亮度及疏密程度与浪高、阳光强度、太阳天顶角等自然条件有关,如图1(a)所示。远处的小目标很容易被背景干扰所淹没,使得目标检测算法失效。
理想条件下的平静海面一般表现为大面积连续分布状态,这时红外图像主体灰度起伏很小,如图1(b)所示。在一定海情条件下,海面上会形成波浪纹理,一般表现为横向条纹,如图1(c)所示。
3 海面背景红外图像纹理特征提取
3.1 小波纹理特征
离散小波变换常用于纹理分类。采用Mallat快速小波分解算法[1]对图像进行预处理。仿真结果(如图2所示)可以看出,强干扰海面的各方向的高频分量较强,而一般条件下海面高频分量较弱,或在单个方向的高频分量较强,理想干净海面背景则各个方向的高频分量都较弱。
计算小波分解后4个通道系数的能量和方差作为图像的小波纹理特征。
3.2 Laws纹理特征
Laws纹理能量度量通过估计纹理中的平均灰度级、边缘、斑点、波纹以及波形来确定纹理属性[2-3]。常用的5×5模板的1-D矢量形式为:
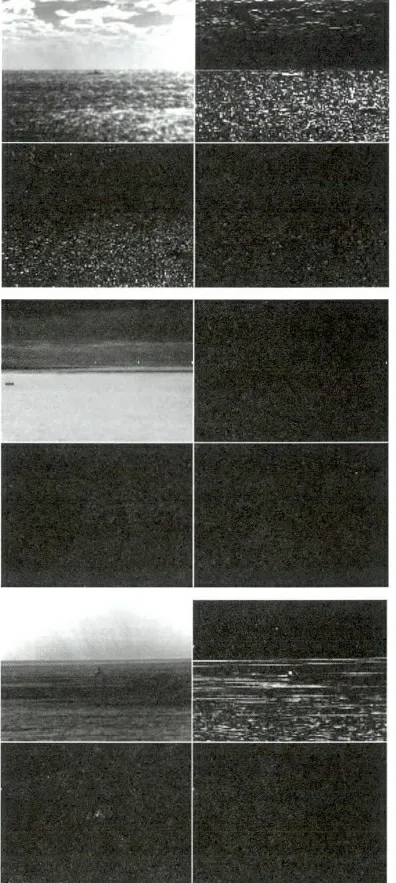
图2 小波分解系数图
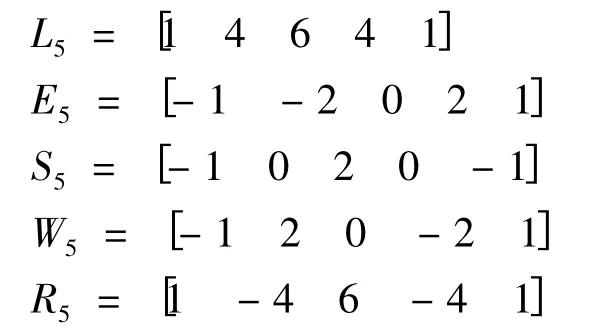
用这5个1-D模板与其自身以及互相卷积后,产生25个5×5的二维Laws掩模。将二维Laws掩模用于图像可得到25个滤波图像。计算滤波后图像的能量和方差作为图像的Laws纹理特征。
3.3 灰度共生矩阵纹理特征
灰度共生矩阵是基于在纹理中某一灰度级结构重复出现的情况,这个结构在精细纹理中随着距离而快速地变化,而在粗糙纹理中则缓慢地变化[4-6]。
设图像的灰度共生矩阵为P,d(g1,g2),它描述了在方向上间隔距离为d,具有灰度级g1和g2的两个像素,在图像中出现的频率。基于归一化的共生矩阵P可定义6个常用的纹理特征:能量、熵、对比度、倒数差分矩、方差和相关性。这6个特征分别描述了图像均匀性、纹理清晰度和复杂度等特性。
4 采用AdaBoost算法构建分类器
4.1 AdaBoost算法
AdaBoost算法是一种迭代算法,其核心思想是针对同一个训练样本集训练不同的弱分类器,然后把这些弱分类器以一定的权重集合起来,构成一个更强的强分类器。AdaBoost算法为每个训练样本引入一个权重,每次迭代训练一个弱分类器使其在当前权重分布下分类错误率最低,在每次迭代完成后增加分类错误样本的权重,降低分类正确样本的权重,从而使下次迭代弱分类器的选择更加重视错误样本[7-8]。
AdaBoost算法的基本流程[9]如下:
给定训练样本(x1,y1)、…、(xn,yn),其中yi=0,1分别代表负样本和正样本。初始化每个样本的权重为其中m、l分别是正样本和负样本的数量。
循环t=1,…,T:
· 权重归一化;
· 对每个特征fj,训练一个仅用这个特征的弱分类器hj。根据每个样本xi当前权重wt,i计算这个弱分类器在训练集上的分类误差εt,j。
· 选择具有最小分类误差εt,j的分类器hj。
· 对所有的样本xi更新权重:
其中,如果分类正确,则ei=0;如果分类错误,则
最终的强分类器为:
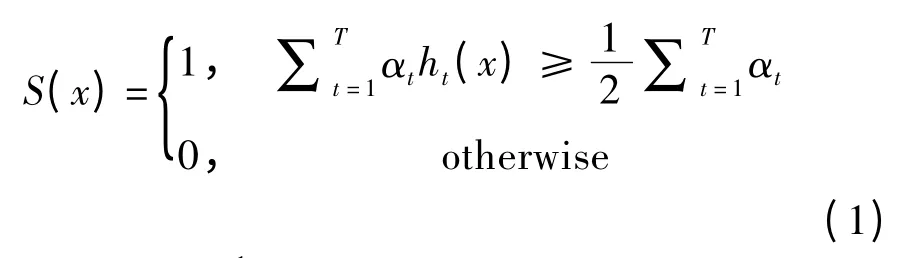
4.2 分类器构建
基本的AdaBoost算法只考虑了两分类问题,通过建立两级二叉树结构分类器,实现三分类问题。其中每级二叉树节点都是用AdaBoost算法训练得到的强分类器。分类流程图如图3所示。
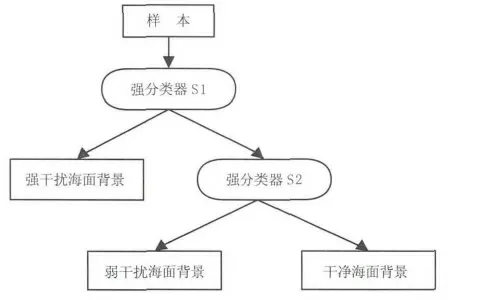
图3 海面场景分类流程图
在训练S1强分类器时,将弱干扰和干净海面背景样本作为正样本,强干扰海面背景样本作为负样本。在训练S2强分类器时,将干净海面背景样本作为正样本,弱干扰海面背景作为负样本。
5 实验设计与验证
5.1 实验样本
在不同季节和光照条件下,在多个海域获得红外图像。试验采用中波红外探测器,红外成像设备的架设高度为5~15 m,红外图像为典型的海天背景。截取红外图像的海面背景部分作为样本,样本图像的大小为284×57,灰度级为256级。表1是训练、测试样本类别及数目。

表1 试验样本组成
5.2 特征提取
提取三种类型的纹理特征作为AdaBoost算法的输入。
小波纹理特征的提取:对样本进行2层离散小波变换,计算每层变换4个通道系数的能量和方差作为样本的小波纹理特征。
Laws纹理特征的提取:本文使用25个Laws滤波掩模,对样本图像进行滤波,并计算滤波后图像的能量和方差,作为样本的Laws纹理特征。
灰度共生矩阵有三个参数变量,分别是灰度级、方向和间隔。原始样本图像的灰度级为256,为减小灰度共生矩阵的计算量,将原图像的灰度级变为64。试验图像中海面纹理方向多为横向纹理,因此本文方向参数选择0°和90°。间隔参数选择4、8、12、16。对给定方向和距离构造样本的共生矩阵,计算每个共生矩阵的6个特征量作为样本的纹理特征。
通过上述三类纹理特征提取,每个样本可获得16个小波纹理特征,50个Laws纹理特征和48个共生矩阵纹理特征。
部分纹理特征在三类实验样本的分布如图4所示。
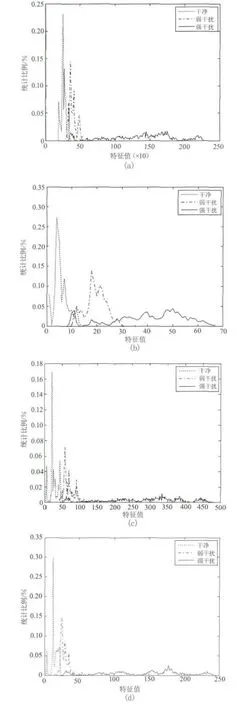
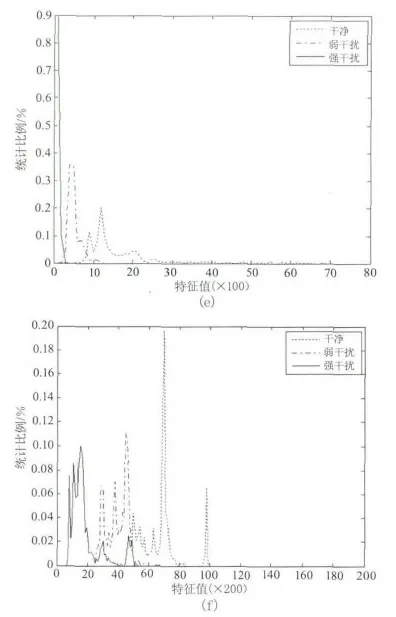
图4 部分特征值在实验样本上的分布
其中,图4(a)、(b)为小波纹理特征(1层小波水平方向系数能量特征和2层小波垂直方向系数能量特征);图4(c)、(d)Laws纹理能量特征(掩模为E5E5和E5S5);图4(e)、(f)灰度共生矩阵特征(0°共生矩阵相关性和倒数差分矩特征)。
图4中,样本本征分布相交越少的特征,其分类性能越好。其中图4(e)特征分类效果相对较好,只基于该特征设计分类器,对弱干扰样本和干净样本进行分类,其分类正确率为98.5%。图4(b)特征分类效果相对较差,只基于该特征设计分类器,同样对弱干扰样本和干净样本进行分类,其分类正确率93.2%。
5.3 实验结果
应用AdaBoost算法对训练集样本进行训练,通过多次迭代,从114个特征中选择出分类误差最小的特征构建强分类器。表2给出了两类强分类器的分类结果。
通过3次迭代,选择出3个最优分类特征构建强分类器S1,可以达到很好的分类效果(正确率100%,虚警率0%)。通过5次迭代,选择出5个最优分类特征构建强分类器S2,也达到较好的分类效果(正确率99.7%,虚警率0.56%)。
使用测试样本集对两种强分类器分类性能进行测试,都取得了好的分类效果。其中强分类器S1的分类正确率100%,虚警率0%;强分类器S2分类正确率99.12%,虚警率为0%。
通过实验,验证了引入AdaBoost算法,经过迭代训练,使用较少纹理特征构建的强分类器能取得好的分类结果。

表2 两类强分类器的分类结果
6 结论
实验结果表明:通过提取三类纹理特征,引入AdaBoost算法进行最优特征选择,构建强分类器,并通过二叉树结构实现对海面场景的分类方法,适应能力较强,能对多种复杂的海面场景取得较好的分类结果。
[1] Mallat SG.A theory of multiresolution signal decomposition:the wavelet representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1989,11:674-693.
[2] Laws K I.Texture energy measures[J].In DARPA Image Understanding Workshop,Los Angeles CA,Los Altos,CA,1979:47-51.
[3] Wu CM,Chen Y C,Hesieh K S.Texture features for classification of ultrasonic liver images[J].IEEE Transactions on Medical Imageing,1992,11:141-152.
[4] Haralick R M,Shanmugan K,Dinstein I.Textural features for image classification[J].IEEE Transactions on Systems,Man and Cybernetics,1973,3:610-621.
[5] Gotlieb C C,Kreyszig H E.Texture descriptors based on co-occurrence matrices[J].Computer Vision,Graphics,and Image Processing,1990,51(1):70-86.
[6] LI Gang,XIONG Yazhou,LIU Kangke,et al.Water wave detection based on texture characteristics[J].Application Research of Computer,2013,20(4):1226-1229.(in Chinese)李刚,熊亚洲,刘康克,等.一种基于图像纹理特征的波浪检测方法[J].计算机应用研究,2013,20(4):1226-1229.
[7] Freund Y.Schapire R E.A decision-theoretic generalization of on-line learning and an application to boosting[J].Journal of Computer and System Sciences,1997,55(1):119-139.
[8] ZHANG Yujin,et al.Subspace-based face recognition[M].Beijing:Tsinghua University Press,2009.(in Chinese).章毓晋,等.基于子空间的人脸识别[M].北京:清华大学出版社,2009.
[9] Viola P,Jones M.Robust real-time object detection[J].International Journal of Computer Vision,2004,57(2):137-154.
