基于双PID的旋转倒立摆控制系统设计与实现
2015-03-24刘二林姜香菊
刘二林,姜香菊
LIU Er-lin1, JIANG Xiang-ju2
(1. 兰州交通大学 机电工程学院,兰州 730070;2. 兰州交通大学 自动化与电气工程学院,兰州 730070)
0 引言
倒立摆是机器人技术、控制理论、计算机控制等多领域、多技术的有机结合,其控制系统本身是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为典型的控制对象对其进行研究。倒立摆的种类很多,有直线倒立摆、旋转倒立摆、平面倒立摆等。旋转倒立摆是三种形式的倒立摆中结构较简单的一种。相对于小车式的直线倒立摆而言,由于其将小车控制改为悬臂的旋转控制,其中间环节较少,机械结构较容易实现;但是其受力分析更加复杂,具有更大的非线性、不稳定及复杂性,对控制算法提出了更高的要求[1,2]。
论文中,采用直流电机,减速机构,微控制器,电机驱动芯片,1024线绝对式编码器等设计了一个一级旋转倒立摆;同时,利用拉格朗日方程对倒立摆进行了动力学分析,建立了系统完整的数学模型,并在MATLAB中采用双PID控制模式进行了控制器设计,并进行了仿真验证。最后,将设计的控制器移植到微控芯片中进行了实际测试,并将测试结果通过通讯模块上传至上位机进行了数据分析。结果表明,设计的系统机械结构合理,响应速度快,鲁棒性好。
1 旋转倒立摆基本结构
旋转倒立摆主要由倒立摆支撑机架、电机、减速装置、摆杆、旋臂、1024线位置式编码器、BT7960构成的H桥电路及微控制器芯片组成。倒立摆结构框图及实物图如图1所示。

图1 倒立摆结构及实物图
在图1(b)中,旋转倒立摆的旋臂与减速器的输出轴联接,减速器由直流电机驱动[3,4],编码器1的齿轮与直流电机主轴齿轮啮合。通过获取编码器1的角度和角速度可以计算出旋臂的角度和角速度。编码器2安装在旋臂末端,且编码器2的旋转轴与旋臂的主轴平行;摆杆安装在编码器2的旋转轴上,摆杆轴线与编码器旋转轴垂直。系统中,旋臂只能以减速器动力输出轴为圆心做水平旋转,摆杆只能以编码器2旋转轴为圆心在旋臂末端旋转轨迹的切面上做竖直旋转。
2 旋转倒立摆数学模型
对旋转倒立摆进行受力分析,建立广义坐标系。系统的简化模型如图2所示。利用拉格朗日方程建立系统的运动学微分方程[1,5~8]。
由图2可知,系统中摆杆与旋臂各有一个自由度,所以,可以取α和θ为广义坐标。则倒立摆系统的动能由四部分组成。

其中T1为旋臂的转动动能,T2为摆杆的转动动能,T3为摆杆沿X轴方向运动的动能,T4为摆杆沿Y轴方向运动的动能,
因为α→0,所以sin α→0,cos α →1,将式1各项进行计算合并,并且对其进行线性化处理可得:


图2 系统简化模型

由式(3)可得:

式 (5) 中,Tout为电机输出扭矩 ,
由式(4)可得:

将式(4)、式(5)联立组成方程组,得到倒立摆系统线性化状态方程。

式(7)中:
以上各式中,参数的物理意义、数值及单位如表1所示。
3 旋转倒立摆控制器设计
旋转倒立摆的控制目标是:使倒立摆摆杆稳定在正上方,摆杆角度旋臂角速度或者使倒立摆在倒立的情况下匀速旋转。如果用传递函数对理想倒立摆系统进行分析,可以发现系统有一个极点在s平面的右半平面,系统不稳定。系统如果希望达到α→0的目标,可以通过PID控制器使系统的两个极点都位于s平面的左半平面,则倒立摆系统稳定[9~12]。

表1 状态方程中各参数列表
通过分析,为了使摆杆和悬臂都稳定在期望的位置,对旋臂和摆杆使用PID控制,在控制器中,PID控制器1对倒立摆摆杆的角度α进行控制,控制器输出为正反馈;PID控制器2对旋臂的角速度进行控制,控制器输出为负反馈。控制系统结构图如图6所示。

图3 双PID控制仿真系统结构图
在仿真过程中,取倒立摆模型的摆杆角度α的初始值为-0.175(约为10度),旋臂初始角度为0。取Kp1=100,Kd1=20,Ki1=1.5,取Kp2=2.2,Kd2=0.08,Ki2=0.01,PID2控制器输出的电压值限幅范围为:-5V~+5V,控制器总体输出的电压值限幅范围为:-10V~+10V,控制器输出部分的m文件如下:



图4 α=0,0时双PID仿真曲线
通过仿真曲线图可以看出,倒立摆系统的摆杆会稳定的停留在α=0处,但是由于摆杆初始角度的存在,同时PID控制器2控制的变量为摆杆的角速度且所以,旋臂会稳定在3rad附近。这与实际控制过程相符合。
通过仿真曲线可以看出,倒立摆旋臂会沿着设定的方向匀速旋转,摆杆的角度会略微偏离0角度,α≈2.1×10-3。这也与旋转倒立摆的实际运行曲线相符合。
4 旋转倒立摆实际运行数据分析
将Matlab中的控制算法移植到微控制器中,通过虚拟示波器将摆杆的角度及旋臂的角速度传到上位机中。上位机虚拟示波器显示的波形图如图6所示。
图6中,纵坐标为角度和角速度,对于角度而言,其单位为:
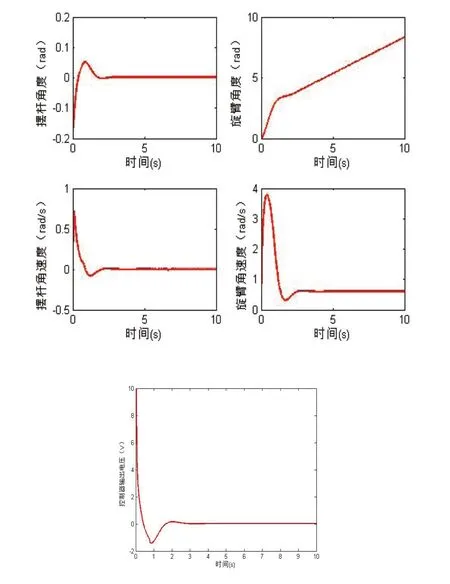
图5 α=0,时双PID仿真曲线

式中512为π所对应的分度值。
对于旋臂角速度而言,其单位为:

式中,512为π所对应的分度值,2.7为传感器齿轮与旋臂齿轮的齿数比,6×10-3为数据监测周期,周期单位为秒。
分析图6(a)可知,运行过程中,倒立摆摆杆一直在震荡,震荡中心线偏离计算中心0,这与倒立摆实际重心与传感器采样中心不重合有关,倒立摆摆动幅度大约在-6.13×10-2~+0.183rad之间。倒立摆旋臂速度有突变,这与电机齿轮与减速齿轮之间的间隙较大有关。这都是在制作实物时的结构不对称造成的。将摆杆处增加一高14cm,重量60g的重物,倒立摆运行波形图见图6(b)。由图6(b)可以看出,摆杆的高度及质量变化后,倒立摆运行依然正常,且系统更稳定。

图6 倒立摆运行波形图
5 结束语
论文的创新点在于:1)利用1024线绝对式编码器及其相关电子元件设计了一款简易旋转倒立摆。2)根据旋转倒立摆的实物,建立了与实际系统相符合的数学模型,并通过MATLAB用双PID控制器对模型进行了控制仿真。3)通过上位机,对实际运行数据进行了采集;通过数据分析,论述了仿真中的数据与实际运行结果差异的原因;并通过实验验证了所设计控制器的良好性能。
[1] 吴爱国,张小明,张钊.基于Lagrange方程建模的单级旋转倒立摆控制[J].中国工程科学,2005,7(10):11-15.
[2] S.Awtar,N.King,T.Allen,I.Bang,M.Hanan,D.Skidmore,K.Craig. Inverted pendulum systems: rotary and arm-driven-a mechatronic system design case study[J].Mechatronics,2002,(12):357-370.
[3] 张朝阳,魏晓赟,王少峰.基于52单片机的旋转倒立摆的研究和与设计[J].廊坊师范学院学报(自然科学版),2014,14(4):49-52.
[4] Du Gaixin,Huang Nanchen, Wu Gang. The rotational invertedpendulum based on DSP controller[A].Proc of the 4th World Congress on Intelligent Control and Automation[C].China Shanghai,2002,7(4):3101-3105.
[5] 宋君烈,肖军,徐心和.倒立摆系统的Lagrange方程建模与模糊控制[J].东北大学学报(自然科学版),2004,23(4):333-337.
[6] 张欣.单级旋转倒立摆的二次型最优控制研究[J].电脑开发与应用,2011,24(12):28-29,32.
[7] 丛爽,张冬军,魏衡华.单级倒立摆三种控制方法的对比研究[J].系统工程与电子技术,2001,23(11):47-50.
[8] 姜倩,管凤旭.旋转式倒立摆的镇定和摆起控制[J].哈尔滨商业大学学报(自然科学版),2007,23(3):232-234.
[9] 江晨,王富东.旋转式倒立摆系统的算法研究及仿真[J].工业控制计算机,2010,23(5) :54-56.
[10] 陈进,王冠凌,邢景虎.单级倒立摆的PID和模糊控制对比研究[J].自动化与仪器仪表,2009,1423(2):17-18.
[11] 曹敏,徐凌桦. 单神经元PID算法在倒立摆控制系统中的应用[J].微计算机信息,2009,25(1-1):70-71.
[12] 杨平,徐春梅,曾婧婧,蒋式勤,彭道刚.PID控制在倒立摆实时控制系统中的应用[J].微计算机信息(测控自动化)2006,22(7-1):83-85.
