基于四象限探测器的激光导引镜头的研制
2015-03-21张军强薛庆生辛久喜
张军强,谢 飞,薛庆生,辛久喜
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;
2.洛阳电光设备研究所,河南 洛阳 471009;
3.大连欧普迪光电仪器有限公司,辽宁 大连 116001)
基于四象限探测器的激光导引镜头的研制
张军强1,谢飞2,薛庆生1,辛久喜3*
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;
2.洛阳电光设备研究所,河南 洛阳 471009;
3.大连欧普迪光电仪器有限公司,辽宁 大连 116001)
摘要:为了满足激光制导对大视场、高线性度探测的性能要求,基于激光制导炸弹的应用需求,介绍了四象限探测器的工作原理和特点,分析了光斑大小、能量均匀性、线性度、探测距离等参数对探测精度的影响;结合系统性能指标,选择了合理的光学系统结构类型,完成了光学系统设计和光机结构设计;利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价,并分析了目标大小和探测距离对光斑大小的影响。测试结果表明,激光导引镜头总视场为±20°、线性视场为±10°、目标大小为1.5~2.4 m、探测距离为50 m~4 km、测角精度优于0.2°,能够满足激光导引的需求。
关键词:激光导引头;四象限探测;光学设计;光机结构设计;仿真分析
Laser guided lens based on four-quadrant detector
ZHANG Jun-qiang1, XIE Fei2, XUE Qing-sheng1, XIN Jiu-xi3*
1引言
随着电子、信息、材料、光学、机械等学科的飞速发展,现代战争已经演化为一个能量密集型、信息密集型、知识密集型的复合系统,激光制导炸弹是一个代表性的例子。激光制导炸弹摆脱了传统炸弹“以量取胜、打哪里指哪里”的作战模式,使炸弹的功能和性能发生了质的飞跃,其高命中率、低成本的特点在近现代历次战争中得到充分的体现[1-3]。
四象限探测器属于主动能量非成像探测,基于四象限探测器的光电探测系统较多元探测系统、红外探测系统在探测效率、可靠性、抗干扰能力、复杂程度、质量体积、成本等诸多方面具有无可比拟的优越性,被广泛应用于激光制导、激光跟踪等领域[4-5]。当前,国内四象限探测系统的线性区较小,研制大视场、大线性区、高精度测角、小型化、可靠性高的导引镜头是激光制导的发展方向。
本文介绍了四象限探测器的工作原理和特点,选择了合理的光学系统结构类型,完成了光学系统设计和光机结构设计,并利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价。结果表明,激光导引镜头总视场为±20°、线性视场为±10°、目标大小为1.5~2.4 m、探测距离为50 m~4 km、测角精度优于0.2°,各项指标达到国内先进水平。
2基于四象限探测器的激光制导原理
2.1 激光制导对导引头的需求
激光制导具有制导精度高、抗干扰能力强、结构简单、成本低、可靠性高等优点。由激光制导的原理可知,激光导引系统应具备以下特征:
(1)大视场:较大的视场能够保证导弹较大的搜索范围,增强导弹飞行中段的机动适应性,降低目标高速运动或更改攻击目标时脱靶的风险。
(2)大线性区:导弹飞行过程中,气流、自身振动等因素会严重干扰弹体的飞行弹道,大线性区是实现高精度弹道修正的前提和保障,有利于降低弹道修正的次数,提高攻击效率。
(3)高精度测角:激光导引头的本质是一个激光测角系统[6],角度偏差是弹道修正的依据,侧角精度直接决定了制导炸弹最终攻击的圆概率误差。
2.2 四象限探测器的探测原理
四象限探测器的光敏面被分割为4个面积相等、形状相同、位置对称、光电响应一致的扇形区域,每个区域为一个独立的光电探测单元,能够根据接收到的能量独立输出对应幅值的电信号。通过对每个区域输出的电信号进行计算,可以得到目标相对视轴的偏移量,如图1所示[5, 7-8]。
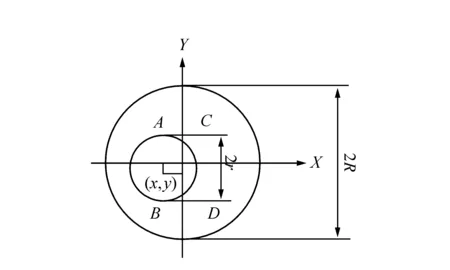
图1 四象限探测器的探测原理 Fig.1 Detecting principle of four-quadrant detector
图1中,R为探测器光敏面的半径,r为探测器光敏面上光斑半径,(x,y)为光斑形心在探测器光敏面坐标系中的位置坐标,A、B、C、D表示光敏面的4个象限,对应的输出电压信号为VA、VB、VC、VD。
对于理想的四象限光电探测系统,当目标与探测系统视轴对准时,在四象限探测器上的圆形光斑位于探测器感光面的中心,即VA、VB、VC、VD的幅值理论上应完全相等,此时有:
(1)
(2)
当目标相对于探测系统视轴有俯仰(上下)角度偏差时,有:
(3)
当目标相对于探测系统视轴有方位(左右)角度偏差时,有:
(4)
根据四象限探测器A、B、C、D4个象限的输出信号值,可以计算出光斑中心在四象限探测器上的坐标(x,y);根据光学系统的焦距f可以计算出目标的方位角偏差α、俯仰角偏差β:
(5)
(6)
因此,利用四象限探测器输出信号,能够快速得到目标相对于系统视轴的角度偏差,为瞄准、跟踪提供修正数据。关于四象限探测器的测角算法及精度分析,国内外学者进行了大量的研究[9-13],本文不再赘述。
3激光导引头光学系统设计及性能分析
3.1 激光导引系统的需求分析
3.1.1光斑大小
四象限激光探测系统对光斑大小的需求包括两方面:
(1)光斑直径大小
在线性视场范围内,光斑必须始终位于四象限探测器的光敏面内,且四个象限光敏区域均含有响应。因此,光斑直径应满足R<2r<2Rr,光斑的具体大小应根据线性视场大小确定。
显然,线性视场越大,系统可探测的角度偏差范围越大,但光斑在四象限探测器光敏面上的相对位移量较小,角度探测精度随之降低。光斑直径、线性视场、角度探测精度等3个指标在实际应用过程中需要权衡设计。
(2)光斑稳定性
光斑稳定性是指线性视场内,同一被探测目标在不同视场角时,在四象限探测器光敏面上的光斑大小变化量(一致性)。由于光斑能量分布不可能绝对均匀,所以同一目标、不同视场条件下的光斑稳定性直接影响着系统对目标角度的探测精度。为了提高测量精度,需要尽量提高光斑的均匀性,相关学者也提出了一些改进算法[11,14]。当前,国内四象限激光探测系统的光斑稳定性一般为3%~5%,国外同类仪器一般要求优于3%。
3.1.2光斑能量分布均匀性
四象限激光探测系统对光斑能量分布均匀性的需求包括两方面:
(1)同一视场光斑能量分布均匀性
由四象限探测原理可知,A、B、C、D4个象限的输出的信号值只与光斑在每个象限的总能量有关,而无法探测出具体的能量分布,现有信号处理算法一般也都是基于光斑能量均匀分布而言的。所以,同一视场光斑能量分布均匀性对四象限激光探测系统至关重要,直接影响系统的角度测量精度。
当然,任何光学系统也无法实现光斑内能量的绝对均匀分布,而只能将其控制在一定范围内,残余误差一般通过系统标定消除或改进的算法修正[15]。
(2)不同视场光斑能量分布稳定性
不同视场光斑能量分布稳定性是指线性视场内,同一被探测目标在不同视场角时,在四象限探测器光敏面上的光斑能量分布变化量(一致性),其对角度测量精度的影响与光斑稳定性类似。
小量级、单视场光斑能量分布非均匀性可以通过系统标定校正,而不同视场光斑能量分布稳定性则较难标定,一般需要通过光学系统设计保证。
3.1.3系统线性度
根据目标的方位角偏差α、俯仰角偏差β的计算公式可知,目标角度偏差计算是基于像面位移量、焦距、视场角三者关系的几何光学基本公式,所以,在线性视场内,光学系统应满足线性系统特征。
系统线性度主要通过降低光学系统畸变来保证,一般要求畸变在0.5%左右,这也是此类光学系统的设计难点之一。
3.1.4四象限探测器象限非均匀性
象限非均匀性与四象限探测器性能、信号采集电路等因素有关[16],与光学系统无关,在此不多赘述。
3.2 激光导引光学系统设计
3.2.1光学系统性能指标
波长:1 064 nm;
相对孔径:F#=0.8;
视场:总视场±20°、线性视场±10°;
有效目标大小:1.5~2.4 m;
有效探测距离:50 m~4 km;
光敏面大小:Φ10 mm;
角度测量精度:优于0.2°。
3.2.2光学系统设计
根据设计输入,该四象限激光探测系统的光学系统特点是大视场、大相对孔径、低畸变、高稳定性,光学系统采用改进型的双高斯结构。由于光源为波段较窄的激光器,并在光学系统中加入窄带滤光片抑制环境光,因而不存在色差,只需考虑5种单色像差。因为球差不影响光斑分布的对称性,所以只需校正彗差、像散、场曲和畸变,保证不同视场的光斑尺寸和能量的均匀性。通过调节离焦距离,使线性视场范围内各个视场光斑直径尺寸满足系统对光斑尺寸的要求。
光学系统由整流罩和改进型双高斯透镜组构成,通过优化曲率半径和镜片间隔实现了像差优化。系统入瞳直径为15 mm,F数为0.8,最大口径为Φ50 mm,光学系统总长为100 mm,主动离焦量为0.548 mm。整流罩采用蓝宝石材料,第一片透镜的第二个光学表面采用二次非球面,非球面系数k=-3.378 24,材料为H-ZF6,如图2所示。
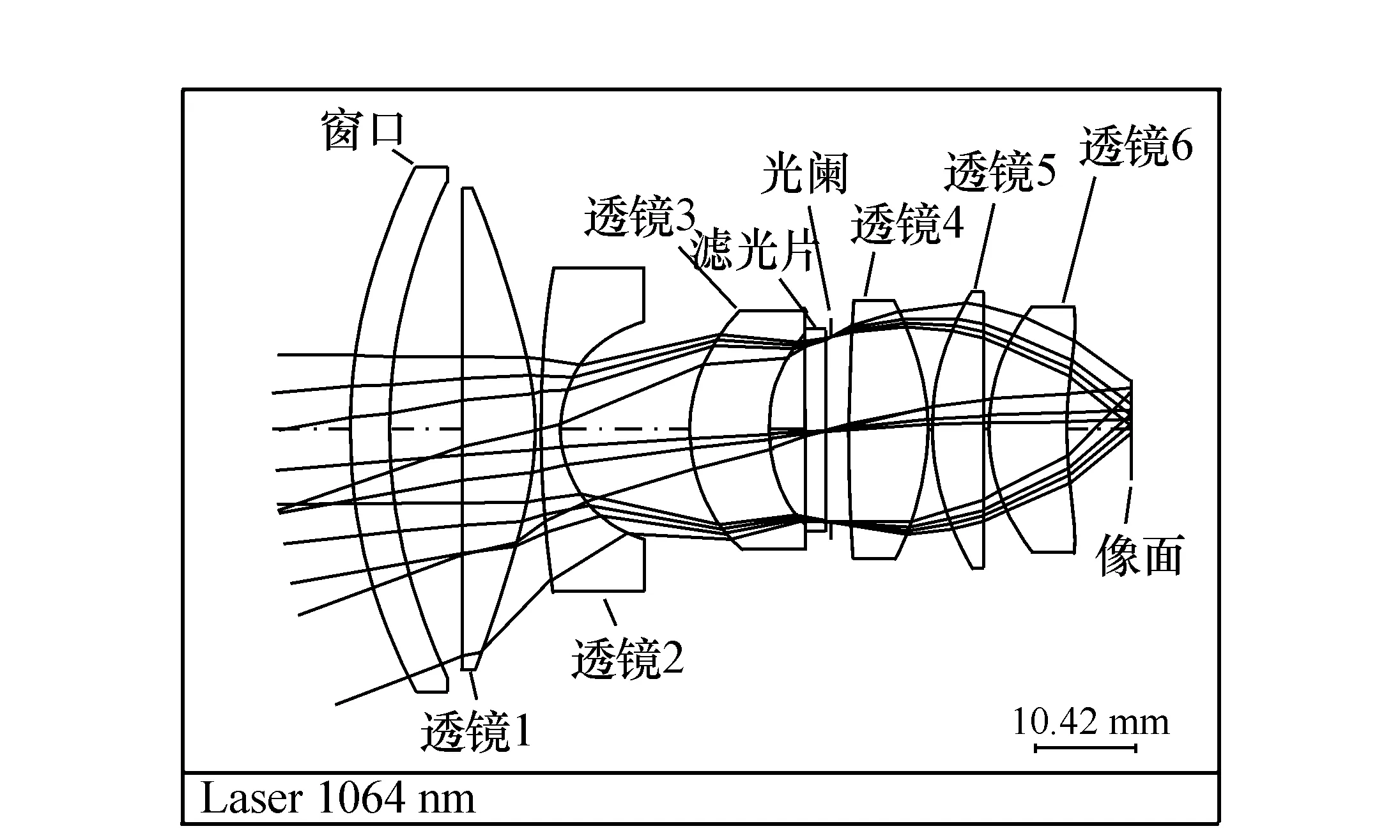
图2 光学系统结构图 Fig.2 Diagram of optical structure
为了减小滤光片的入射角度,降低由于入射光锥角导致的谱线漂移量[17],将滤光片置于孔径光阑附近,以缩小滤光片的口径,降低成本和质量。滤光片选用日本西格玛光机VPF-25C-01-30-10640型窄带滤光片(部分参数定制),1 nm~3.0 μm截止区透过率小于0.01%、半高宽为1 nm、峰值透过率大于45%、基板厚度为2.5 mm。
3.3 激光导引光学系统性能分析
激光制导导引头光学系统主要关注光斑稳定性和能量分布均匀性,因此不能用传统成像系统的评价方法,一般是通过光学系统畸变、点列图、光线足迹图、包围能量分布图等来评价[4-5, 12]。
3.3.1光学系统畸变
畸变不仅影响不同视场光斑直径稳定性和光斑能量分布稳定性,还直接决定着系统的线性度,是此类光学系统的一个重要的技术指标。本光学系统优化设计后的畸变控制在0.3%左右,如图3所示,满足设计要求。
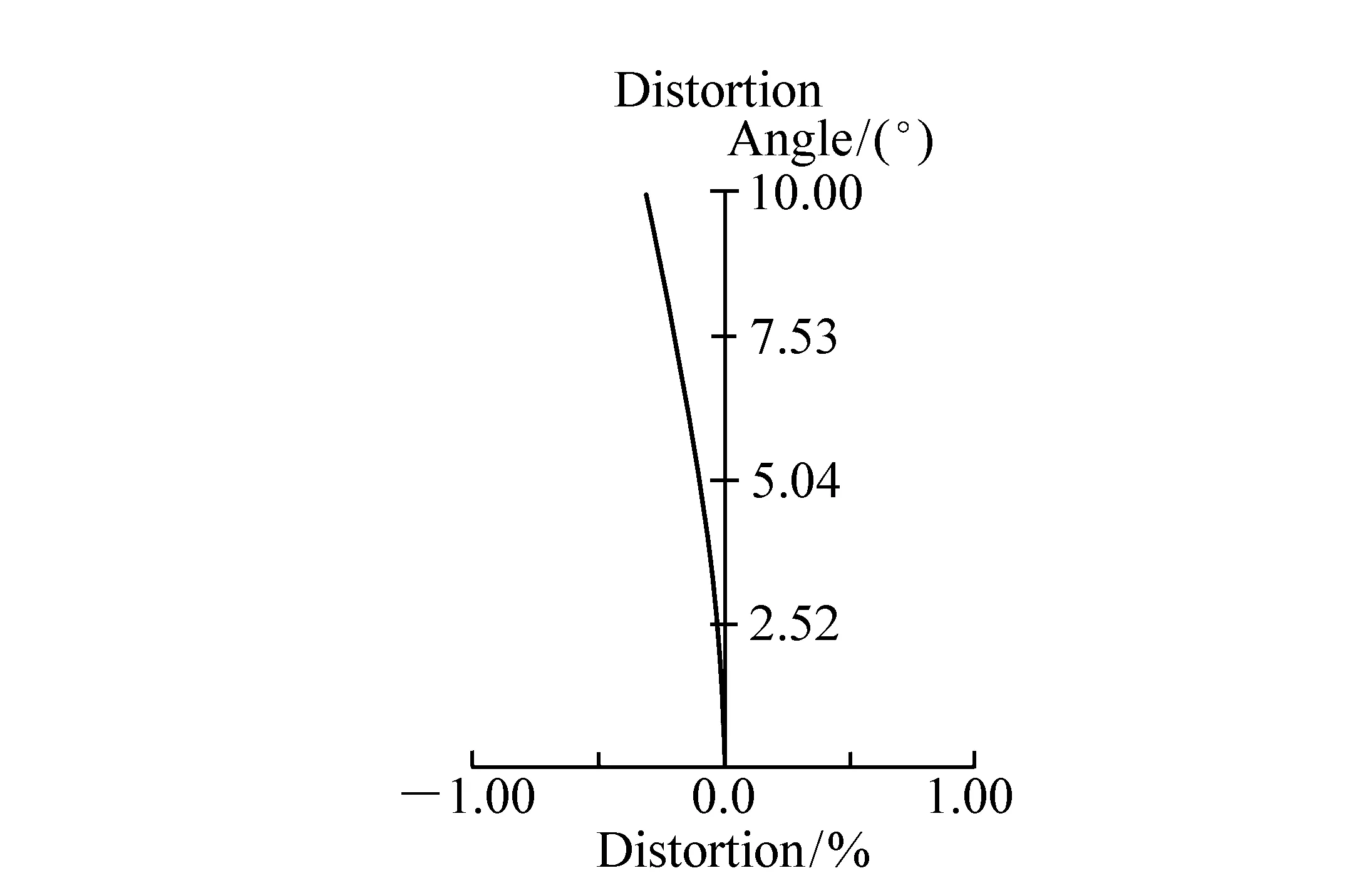
图3 光学系统畸变曲线(目标大小为1.5 m,探测距离为4 000 m) Fig.3 Distortion of optical system(Diameter of target:1.5 m, detection distance:4 000 m)
3.3.2点列图
点列图可以反映不同视场的光斑大小和能量分布,对分析光斑分布均匀性有一定指导意义,图4给出了线性视场内0°、2°、4°、6°、8°、10°视场的光斑点列图。从图中可以看出,0°、2°、4°、6°、8°、10°视场光斑直径大小分别为5.05、5.04、5.06、5.05、5.08、5.09 mm,最大偏差量小于1%,且光线分布比较均匀,满足四象限探测对光斑尺寸的要求。
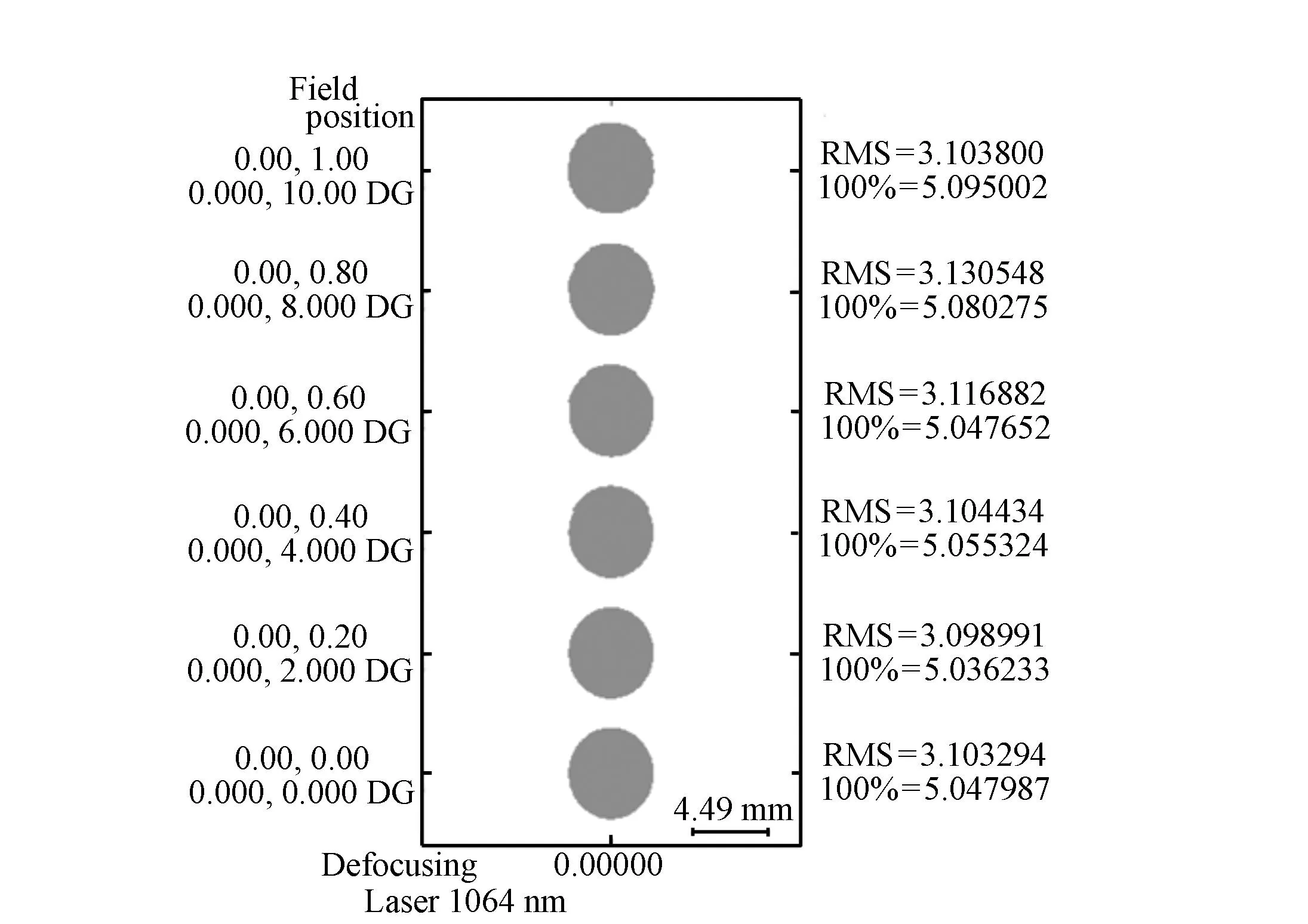
图4 不同视场的点列图分布(目标大小为1.5 m,探测距离为4 000 m) Fig.4 Spot of optical system(Diameter of target:1.5 m, detection distance:4 000 m)
3.3.3光线足迹图
光线足迹图主要为了显示不同视场光斑在探测器光敏面上的位置,可以直观地得到光斑和探测器中心的相对位置。图5给出了线性视场内0°、10°、20°视场时光斑的痕迹图。
从图5中可以看出,视场为10°时,光斑边缘与探测器边缘接近,但未超出探测器光敏面,而且覆盖所有四个象限;视场为20°时,光斑位于四象限探测器光敏面的面积大于50%,满足探测视场±20°、线性视场±10°的指标要求。
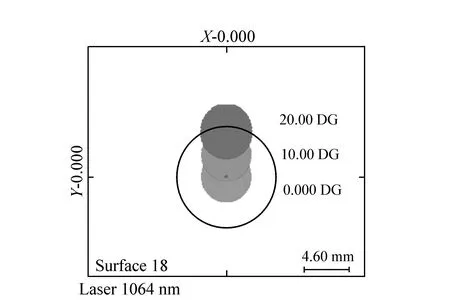
图5 光线足迹图(目标大小为1.5 m,探测距离为4 000 m) Fig.5 Spot of footprint(Diameter of target:1.5 m, detection distance:4 000 m)
3.3.4能量集中度曲线
能量集中度曲线表示光斑能量随光斑直径的分布情况,图6给出了视场0°、10°、20°的能量集中度曲线。由图6可知,能量与光斑直径近似成抛物线关系,能量分布较均匀,10°线性视场内光斑能量分布稳定性优于1.5%,满足设计要求。
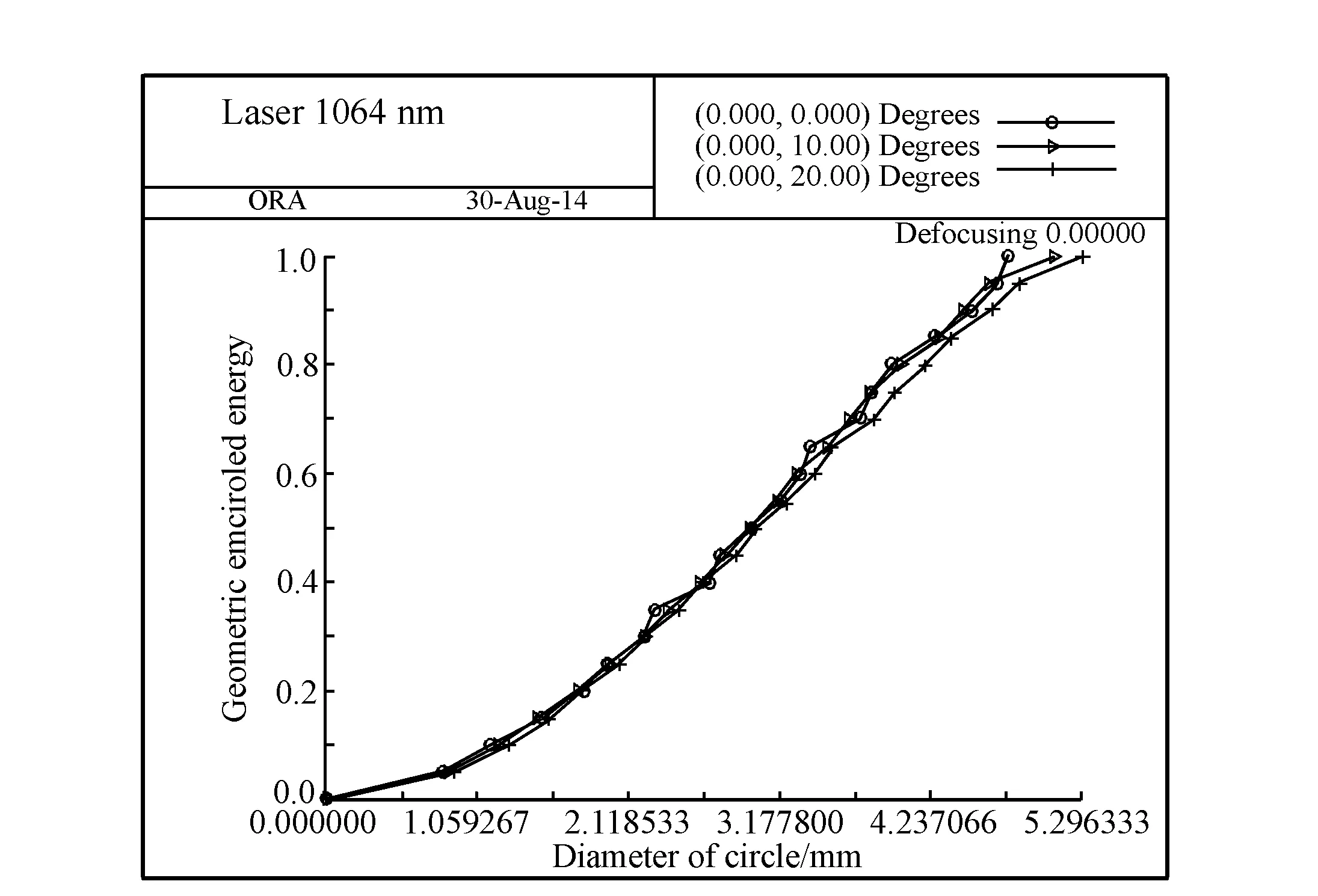
图6 不同视场光斑能量集中度曲线(目标大小为1.5 m,探测距离为4 000 m) Fig.6 Geometric encircled energy for different fields(Diameter of target:1.5 m, detection distance:4 000 m)
3.3.5目标大小、探测距离对光斑大小的影响
由激光制导的原理可知,对于视场角一定的
引导激光束和导引镜头,引导激光发射平台与目标之间不同的距离,导引头接收到的激光回波光斑大小也将发生变化,本系统要求有效目标大小1.5~2.4 m、有效探测距离为50 m~4 km范围内均能正常工作。
为了保证远距离、小目标探测时具有足够大的光斑直径,而在近距离、大目标探测时又不至于光斑溢出探测器光敏面,对焦距、离焦量等系统技术指标进行了权衡设计。通过光线追迹,中心视场时目标大小、探测距离对光斑大小的影响如表1所示。
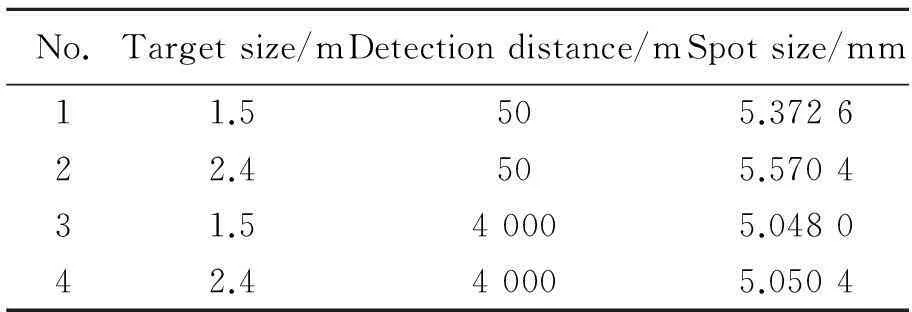
表1 中心视场目标大小和探测距离
由表1可知:
(1)同一探测距离时,目标大小对光斑直径影响相对较小;
(2)同一目标大小时,探测距离对光斑直径影响较大;
(3)短距离探测时,光斑直径受目标大小的影响较为显著。
本系统线性视场角10°,边缘视场对应的光斑极限位移量为2.1 mm,远距离、小目标和近距离、大目标两种极端工况下的光斑余量为:
(1)目标大小为1.5 m、探测距离为4 000 m时,线性视场边缘状态下,光斑中心余量为0.424 mm,探测器四个象限均有响应;
(2)目标大小为2.4 m、探测距离为50 m时,线性视场边缘状态下,光斑边缘余量为0.114 8 mm,光斑相对于探测器感光面无溢出。
综上所述,光斑直径、焦距等系统指标设计合理,能够满足探测需求。
3.3.6温度变化对光斑大小的影响
由于工作环境的特殊性,温度对导引头光学系统的影响不容忽视。对于非成像的导引头光学系统,一般用不同温度下的点列图反映光斑大小和形状的变化,表2为目标大小为1.5 m,探测距离为4 000 m时,不同温度下的系统点列图变化。
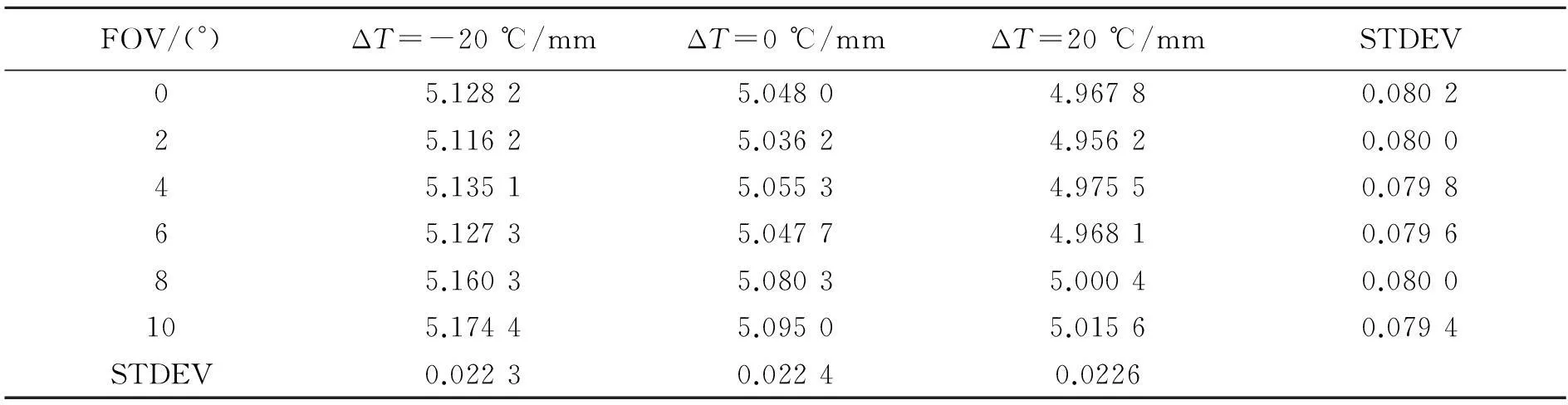
表2 不同温度载荷下系统光斑大小的变化
由表2可知:
(1)同一温度、不同视场的光斑大小基本一致,最大偏差量小于1%,满足四象限探测对光斑尺寸的要求;
(2)不同温度下,所有视场的光斑大小均发生线性变化,随着温度升高,光斑大小将变小,20 ℃温差时变化量在1.5%左右,但并不影响光斑中心在四象限探测器上的坐标位置,满足四象限探测对光斑尺寸的要求。
4激光导引光学镜头的结构设计
本系统为一个中小口径、中等精度、透射式近红外光学系统(如图7所示),为了满足大温差的工作需求,采用线膨胀系数匹配钛合金镜座,保证镜头的温度适应性;镜座之间留有圆形通气孔,满足不同温度、压力条件下的放气需要;镜座内壁采用喷砂、发黑的表面处理工艺,实现杂散光抑制;采用定心车的装配工艺,在满足光学公差的前提下,易于实现批量生产。
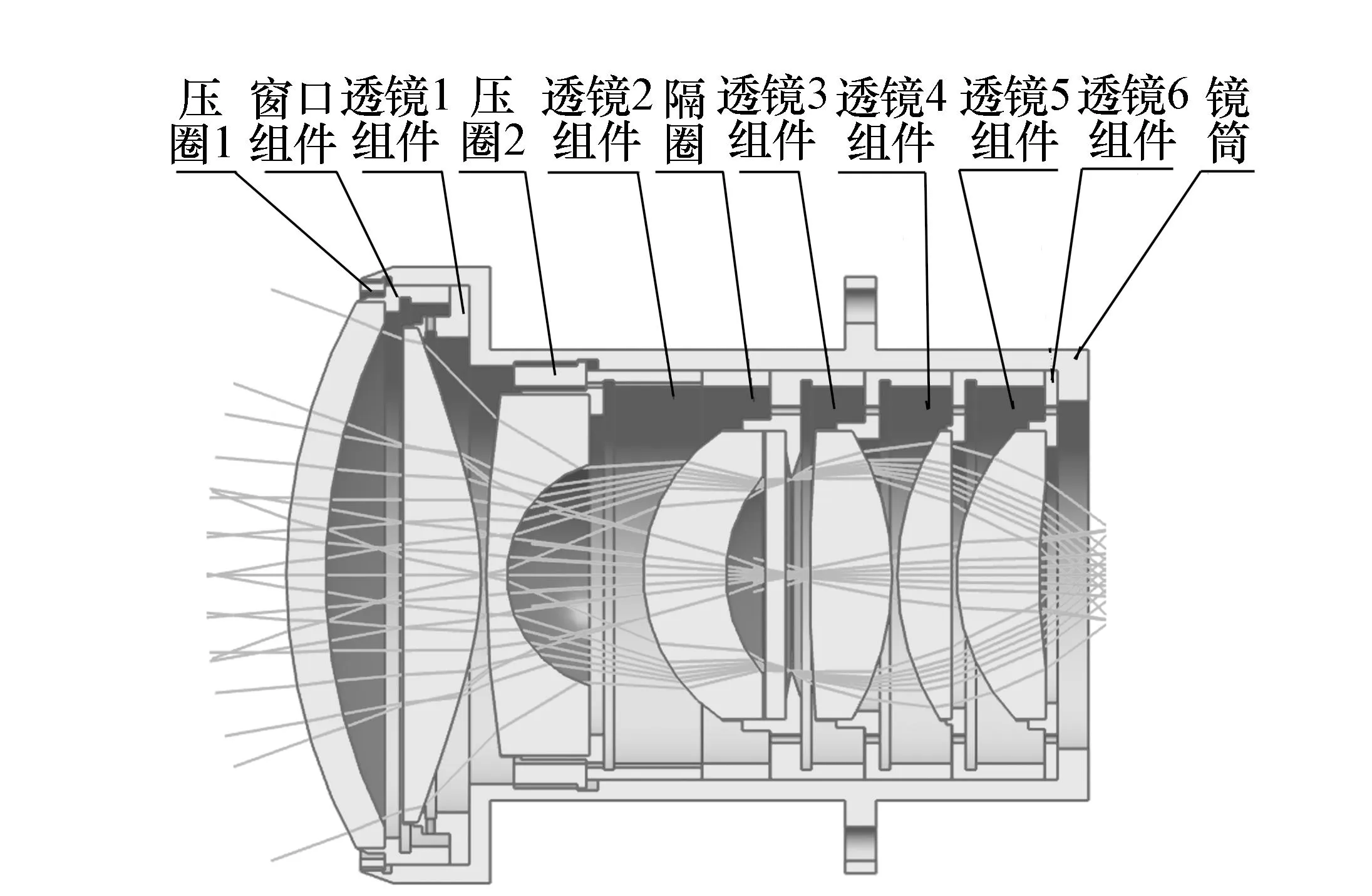
图7 光导引头结构设计 Fig.7 Opti-mechanical design of laser seeker
5样机测试
原理样机研制由洛阳电光设备研究所资助,在大连欧普迪光电仪器有限公司完成加工、装配后,利用卤钨灯光源、反射式红外平行光管(星点目标板)、高精度转台对系统的线性视场、角度测量精度等关键指标进行了测试。使用宽带光源而非单波长激光光源可使测试更接近实际工作状态,同时检验系统的杂光抑制性能。
首先,调整四象限探测器的像面坐标系与大地坐标系平行,测试水平方向(方位角)的相关性能参数;然后,将镜头沿光轴旋转90°,等效测试竖直方向(俯仰角)的相关性能参数,测试系统如图8所示。鉴于篇幅有限,在此仅列出方位角的测试结果,如图9、图10所示。

图8 样机性能测试 Fig.8 Testing for prototype

图9 线性视场测试结果 Fig.9 Results of linear field testing
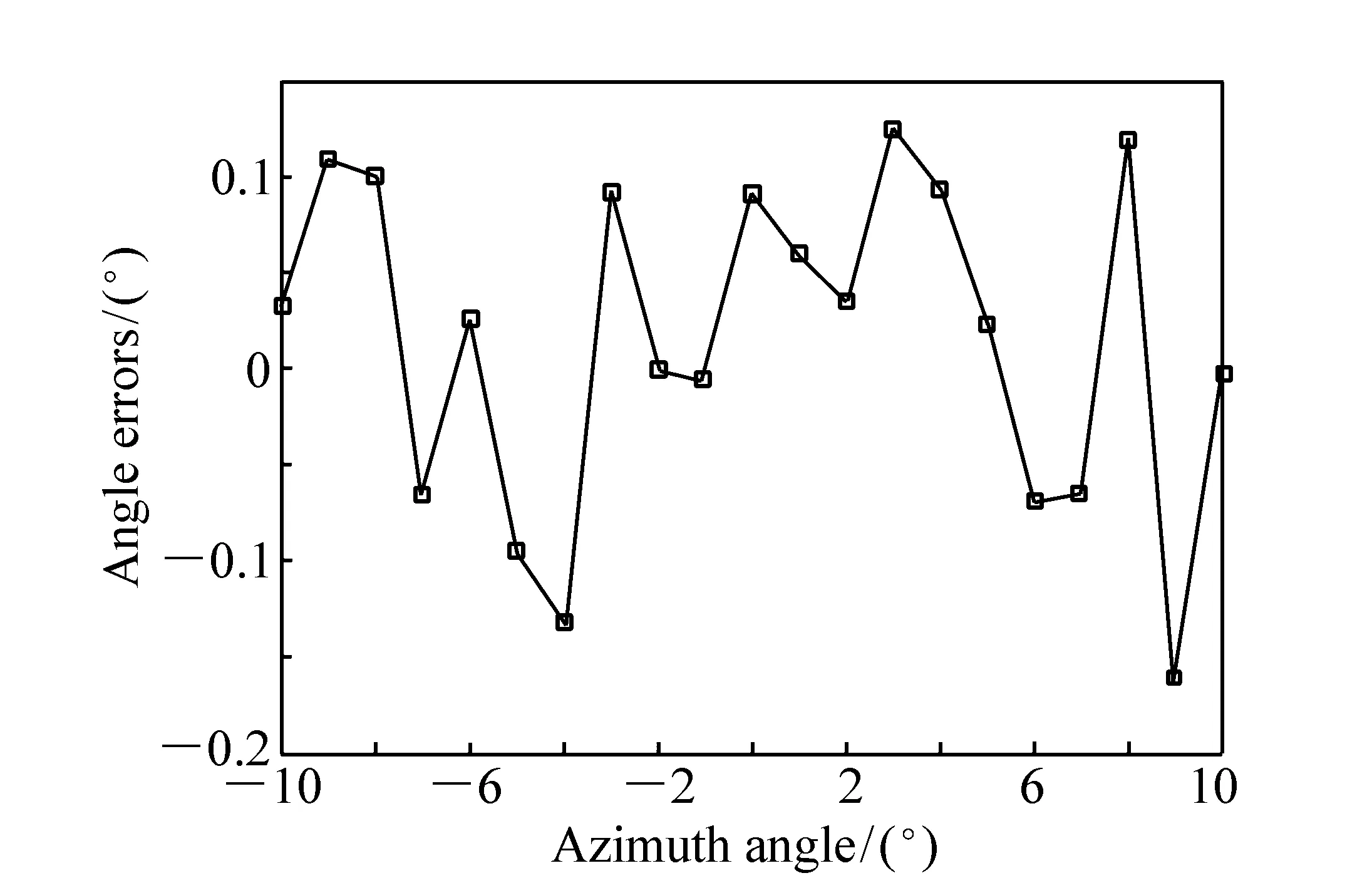
图10 角度测量误差测试结果 Fig.10 Angle errors of tracking accuracy
图10中,角度测量误差用实际测量结果相对于理论计算值的相对差值表示,由图9、图10可知,系统性能满足线性视场±10°、测角精度优于0.2°的指标要求。
6结论
根据激光制导的工作原理,分析了基于四象限探测器激光制导镜头的指标需求,完成了光学系统设计和光机结构设计,并利用畸变、点列图、足迹图、能量集中度等指标对系统性能进行了评价,最后通过样机研制和实验室测试,验证了线性视场、角度测量精度等关键技术指标。结果表明,激光导引镜头总视场为±20°、线性视场为±10°、有效目标大小为1.5~2.4 m、有效探测距离为50 m~4 m、测角精度优于0.2°,满足设计指标要求。
参考文献:
[1]施德恒,胸水英.激光半主动寻的制导导弹发展综述[J].红外技术,2000,22(5):28-34.
SHI D H,XIONG SH Y. The summarizer of laser semi-active seeking guided missiles' development[J].InfraredTechnology,2000,22(5):28-34.(in Chinese)
[2]王狂飙.激光制导武器的现状、关键技术与发展[J].红外与激光工程,2007,36(5):651-656.
WANG K B. Status,key technology and development of laser guided weapon[J].InfraredandLaserEngineering,2007,36(5):651-656.(in Chinese)
[3]鲍海阁.国外激光半主动寻的制导武器的发展[J].船舶电子工程,2010,30(5):21-25.
BAO H G. Development of laser semi-active homing guidance weapons[J].ShipElectronicEngineering,2010,30(5):21-25.(in Chinese)
[4]胡博,常伟军,孙婷,等.激光半主动制导导引头光学系统的设计[J].应用光学,2012,33(2):402-405.
HU B,CHANG W J,SUN T,etal.. Laser semi-active seeking guided seeker optical system[J].J.AppliedOptics,2012,33(2):402-405.(in Chinese)
[5]薛珮瑶,吴耀,冯茜,等.大视场四象限探测光学系统设计[J].中国光学,2014,7(3):462-468.
XUE P Y,WU Y,FENG Q,etal.. Design of the large field optical system for four-quadrant detecting[J].OpticalInstruments,2014,7(3):462-468.(in Chinese)
[6]陈勇,祝天瑞,李蕊.基于插值法的四象限探测器测角算法设计与实现方法分析[J].红外与激光工程,2011,40(3):544-569.
CHEN Y,ZHU T R,LI R. Design and realization of the angle-measurement algorithm of the four-quadrant detector based on the interpolation algorithm[J].InfraredandLaserEngineering,2011,40(3):544-569.(in Chinese)
[7]NISLSEN T T. Pointing' acquisition and tracking system for the free space laser communication system[J].SPIE,1995,2381:2.
[8]林志奇,李会杰,郎永辉,等.用四象限光电探测器获得光斑参数[J].光学 精密工程,2009,17(4):764-770.
LIN ZH Q,LI H J,LANG Y H,etal.. Obtaining spot parameters by quadrant photodetectors[J].Opt.PrecisionEng.,2009,17(4):764-770.(in Chinese)
[9]YANHAI Y. The design of echo spot and optical focusing in automatic laser tracking[J].OpticsandLaserTechnology,1986,18(2):75-79.
[10]胡贤龙,周世椿.几种四象限探测器测角算法的分析研究[J].激光与红外,2007,37(6):546-551.
HU X L,ZHOU SH CH. Analysis and research on several angle-measurement algorithms based on four-quadrant detector[J].Laser&Infrared,2007,37(6):546-551.(in Chinese)
[11]陈勇,祝天瑞,李焕功.四象限探测器测角算法分析与改进[J].激光与红外,2009,39(6):669-672.
CHEN Y,ZHU T R,LI H G. Analysis and improvement in angle-measurement algorithm of the four-quadrant detector[J].Laser&Infrared,2009,39(6):669-672.(in Chinese)
[12]张雷,张国玉.影响四象限探测器探测精度的因素[J].中国激光,2012,39(6):1-5.
ZHANG L,ZHANG G Y. Affecting factor for detection accuracy of four-quadrant detector[J].ChineseJ.Lasers,2012,39(6):1-5.(in Chinese)
[13]陈梦苇,杨应平,贾信庭,等.四象限探测器光斑中心定位算法研究[J].武汉理工大学学报(交通科学与工程版),2013,37(5):1124-1127.
CHEN M W,YANG Y P,JIA X T,etal.. Research of spot center location algorithm for four quadrant detector[J].J.WuhanUniversityofTechnology(Transportation Science & Engineering),2013,37(5):1124-1127.(in Chinese)
[14]高紫俊,董丽丽,孟丽艳,等.四象限探测器高精度定位算法研究[J].光电子·激光,2013,24(12):2314-2321.
GAO Z J,DONG L L,MENG L Y,etal.. Study for high-precision positioning algorithm of four-quadrant detector[J].J.OpoelectronicsLaser,2013,24(12):2314-2321.(in Chinese)
[15]周培松,卢荣胜,周维虎,等.四象限探测器用于激光跟踪仪目标脱靶量测量[J].光电技术应用,2014,29(1):75-79.
ZHOU P S,LU R SH,ZHOU W H,etal.. Measurement system for laser tracker′s target-missing quantity based on four-quadrant detector[J].Electro-opticTechnologyApplication,2014,29(1):75-79.(in Chinese)
[16]赵鑫,佟首峰,刘云清,等.四象限探测器在空间激光通信中应用研究[J].光电子·激光,2010, 21 (1):46-49.
ZHAO X,TONG SH F,LIU Y Q,etal.. Application research on four-quadrant detector in space laser communication system[J].J.OptoelectronicsLaser,2010,21(1):46-49.(in Chinese)
[17]张军强,王笑夷,张新洁,等.光锥角对窄带滤光片透射率的影响及补偿方法[J].光学学报,2014,34(1):0131001.
ZHANG J Q,WANG X Y,ZHANG X J,etal.. Effects and corrections of incidence light cone on transmission characteristics of narrowband filter[J].ActaOpticaSinica,2014,34(1):0131001.

张军强(1981—),男,江苏泰兴人,博士,副研究员,2004年、2007年于吉林大学分别获得学士、硕士学位,2012年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事航空航天光学遥感仪器研制、光机系统整体性能评价等方面的研究工作。E-mail:zjq1981_81@163.com

谢 飞(1984—),男,河南洛阳人,硕士,工程师,2007年于天津大学获得学士学位,2011年于中国航空研究院获得硕士学位,主要从事光电检测、图像处理等方面的研究。E-mail:xiefei0379@icloud.com

薛庆生(1979—),男,山东梁山人,博士,副研究员,硕士生导师,2010年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事光学系统设计、航空和航天遥感成像光谱技术及光谱辐射定标等方面的研究。E-mail:qshxue2006@163.com

辛久喜(1984—),男,河北遵化人,学士,工程师,2008年于沈阳航空工业学院获得学士学位,2011年于华南理工大学获得硕士学位,主要从事金属材料、自动控制、机器视觉等方面的研究。E-mail:xinjiuxi@opti-instruments.com
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,
ChineseAcademyofSciences,Changchun130033,China;
2.LuoyangInstituteofElectro-OpticalEquipment,Luoyang471009,China;
3.DalianOptiPhotoelectricInstrumentsCo.,Ltd.,Dalian116001,China)
Abstract:In order to meet the leaser guiding requirements, such as large FOV, high linearity detecting and so on, the working principle and characteristics of four-quadrant detector are introduced based on the application requirements of laser-guided bombs. Spot size, energy uniformity, linearity, detection range and other parameters which influence detection accuracy are analyzed. Based on the system requirements, a reasonable structure type of optical system is selected, and optical system design and machine design are completed. Distortion, spot diagram, footprint and geometric encircled energy are used to evaluate the system performance, and the effects of target size and detection distance on spot size of the guidance system are presented. Test results show that the total FOV is ±20°; the linear FOV is ±10°; the detectable target size is 1.5~2.4 m; the detectable detection range is 50 m~4 km and angle detecting accuracy is better than 0.2°, which meet the needs of laser guidance.
Key words:laser seeker;four-quadrant detector;optical design;opti-mechanical design;simulation analysis
作者简介:
*Corresponding author, E-mail:xinjiuxi@opti-instruments.com
中图分类号:TJ765.3; TH743; O435
文献标识码:A
doi:10.3788/CO.20150803.0471
文章编号2095-1531(2015)03-0471-09
基金项目:国家高技术研究发展计划(863计划)资助项目(No.2011AA12A103)
收稿日期:2014-12-12;
修订日期:2015-02-13
