编码器动态检测系统高实时性高精度角度基准设计
2015-03-21万秋华王树洁卢新然杜颖财
于 海,万秋华,王树洁,卢新然,杜颖财
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
编码器动态检测系统高实时性高精度角度基准设计
于海,万秋华*,王树洁,卢新然,杜颖财
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
摘要:在编码器动态特性检测中,角度基准的快速反应和精度直接影响着动态特性检测装置的准确性。为实现角度基准的快速响应,提高基准编码器的测角精度,本文设计了高精度快速细分角度基准编码器。首先,通过对目前角度基准不足对编码器动态特性检测影响的分析,得出动态检测精度主要受基准编码器的数据处理延时影响。其次,通过对基准编码器结构、细分电路、处理电路等的设计,完成了23位高实时性角度基准编码器的制作。最后,为提高检测精度,利用RBF神经网络对角度基准进行误差补偿。所设计的角度基准编码器分辨率达到0.15″,并且可以在10 r/s速度时,保证逐分辨率输出。经过测量,补偿前基准编码器的精度为1.30″,补偿后的基准编码器误差峰峰值不超过2.5″,精度优于0.6″。高精度、高实时性角度基准编码器的研制,提高了编码器动态特性检测系统的检测精度,为研究编码器动态特性提供了基础。
关键词:动态检测;角度基准;快速细分;高精度;误差补偿
High-precision real-time angle reference in dynamic
1引言
光电编码器是一种数字式角度传感器,它以高精度计量圆光栅为测量元件,通过光电转换,将输入的角位置信息转换成相应的数字代码,并可与计算机及显示装置相连接,实现数字测量与数字控制。与其它同类用途的传感器相比,它具有精度高、测量范围广、体积小、质量轻、使用可靠、易于维护等优点,具有较高的性价比。因此已普遍应用在雷达,光电经纬仪,地面指挥仪,机器人,数控机床和高精度闭环调速系统等诸多领域,是自动化设备理想的角度传感器[1-7]。在光电编码器的研制生产过程中,需要对其误差、精度进行检测,包含静态误差精度检测与动态误差精度检测。随着科学的发展科技的进步以及航空航天技术的飞速发展,光电测控设备的跟踪、定位精度对角速度及角加速度的敏感度的增加,不仅要求编码器实时提供角度信息,同时还要求在角速度、角加速度作用下保证精度。但是国内还没有较好的动态误差精度检测设备,大多只能通过检测静态误差精度,来估计动态误差精度[8-10]。
目前设计的小型光电编码器动态特性检测设备,采用比较法利用高分辨率、高精度基准编码器作为角度基准,使角度基准与被检编码器同轴转动,在不同的转速下,完成对被检编码器动态特性的评定。基准编码器作为评定被检编码器特性的基准源,其特性直接影响检测结果的正确性。
根据以往工作经验,在动态检测中,限制检测速度的主要因素是基准编码器的响应时间。传统高精度编码器采用高精度A/D转换器对莫尔条纹信号进行插补细分,经过微处理器的处理输出当前角度数据的二进制数值[11-16]。但是A/D转换的时间和微处理器的处理延迟时间使高转速下的动态测量结果不够准确。
为增加角度基准编码器的数据输出实时性,并提高动态检测精度。本文设计了一种高分辨率、高实时性的编码器,并通过RBF神经网络进行误差补偿,提高了其静态精度。在实际工作中表现出色。
2编码器延时误差分析
高精度A/D转化芯片的使用,为提高编码器细分精度做出了贡献。但是受编码器制造成本限制,目前使用在高精度编码器上的A/D转换芯片的转换速度并不高。同精度的A/D转换芯片,随着其转换速度的加快,价钱也成数量级的增加,从而限制了高速A/D芯片在高精度编码器上的使用。
设在编码器动态状态下,A/D转换器的转换时间为tA/D,微处理器的数据计算时间为tm,忽略放大器稳定等时间。那么每一次角度数据的转换时间为:
(1)
设编码器当前角速度为v,由于编码器数据处理时间的存在,将使每次数据的输出产生延时误差:
(2)
对于软件细分的编码器,转速越快其误差将越大。对于n位的编码器,其分辨率为:
(3)
当角速度
(4)
使μ1>δ,那么编码器会出现跳码。可见,若使用实时性不好,数据处理延迟大的编码器作为检测装置的角度基准,将会使检测结果严重偏离真实值。
3高实时性基准编码器设计
3.1 结构设计
光电编码器能够通过光学元件将角度位置信息转换为数字量输出,它主要由:轴系、发光管、码盘、狭缝、接收管、放大电路和细分电路组成,如图1所示。
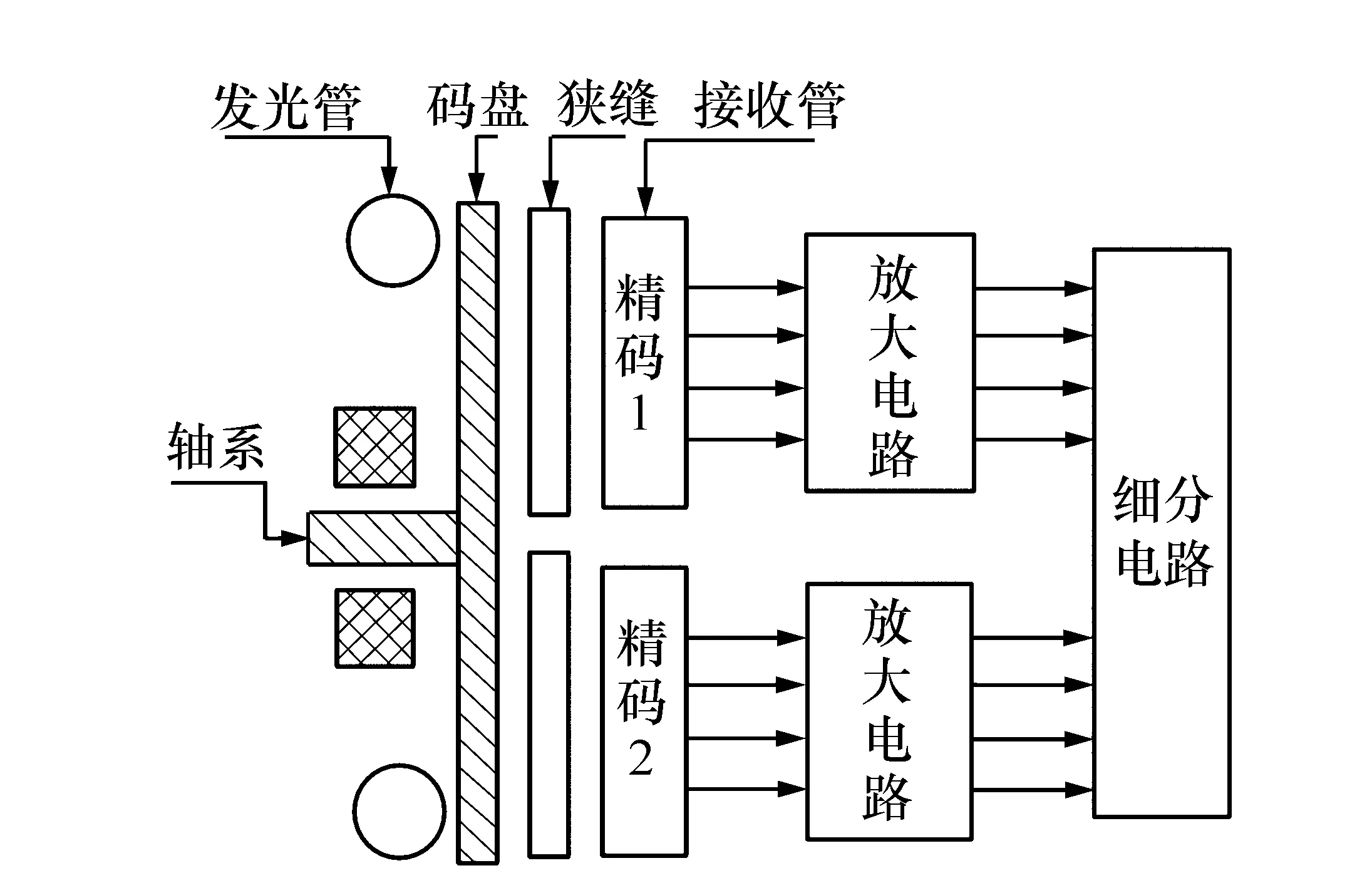
图1 光电编码器原理图 Fig.1 Schematic of photoelectric encoder
编码器工作时,发光管发出的红外光线透过码盘和狭缝形成莫尔条纹干涉信号被光电接收管接收到。接收管的莫尔条纹电信号经过放大电路的放大进入细分电路进行插补细分处理。与传统的绝对式光电编码器不同的是,本文设计的编码器不需要粗码信号,减少了处理粗码信号及精码粗码校正等环节,提高了编码器数据处理速度。
由于只对精码进行处理,编码器码盘只刻划精码码道,其一圈刻划4 096 lp,并且刻划零点。码盘如图2所示。
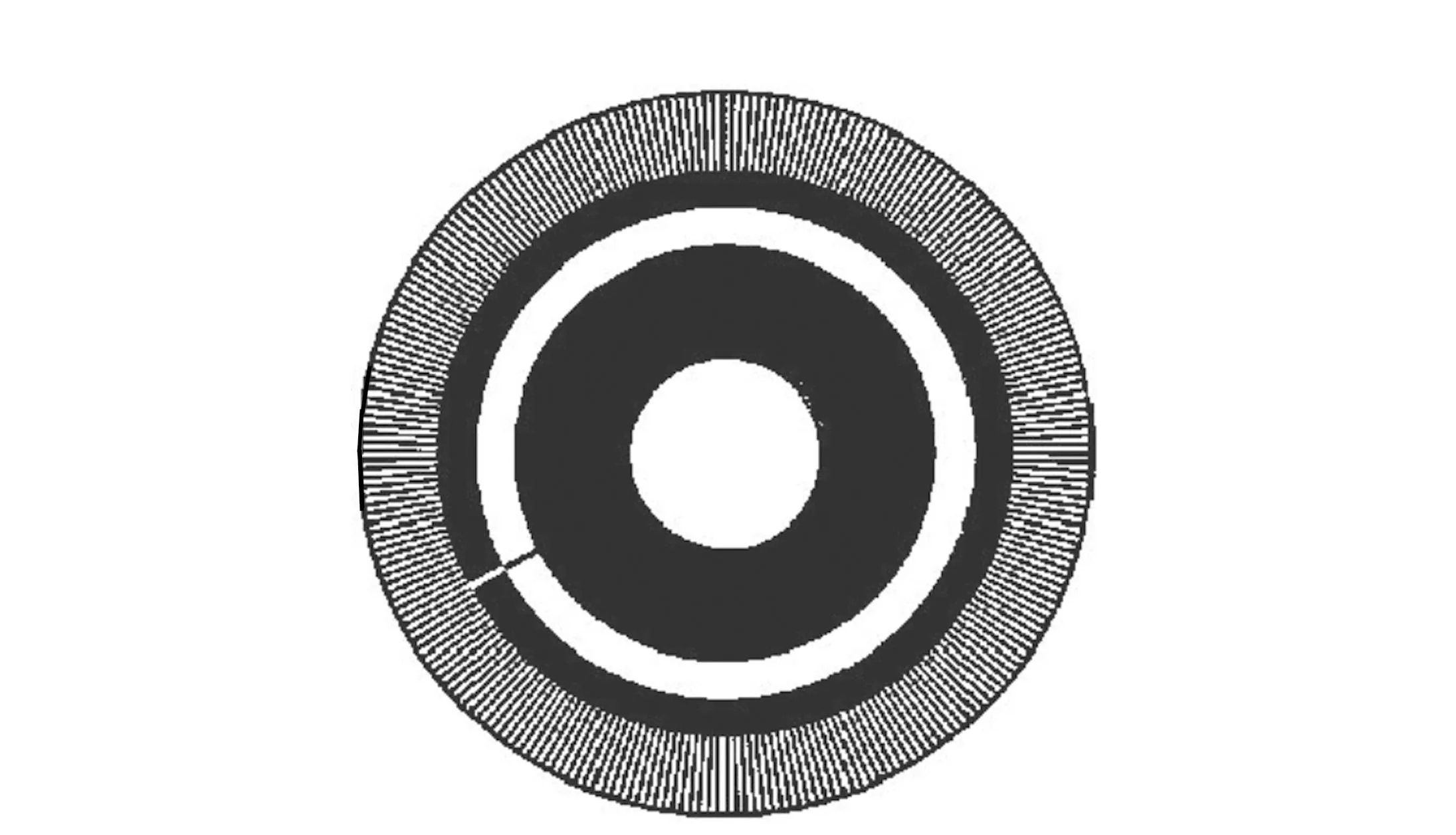
图2 码盘 Fig.2 Coded disc
编码器码盘直径为200 mm,利用狭缝裂相方案获得4路精码信号,使其相位依次错开90°。采用对径读数的方法保证精码信号精度[17-18],读数头放置位置如图3所示。
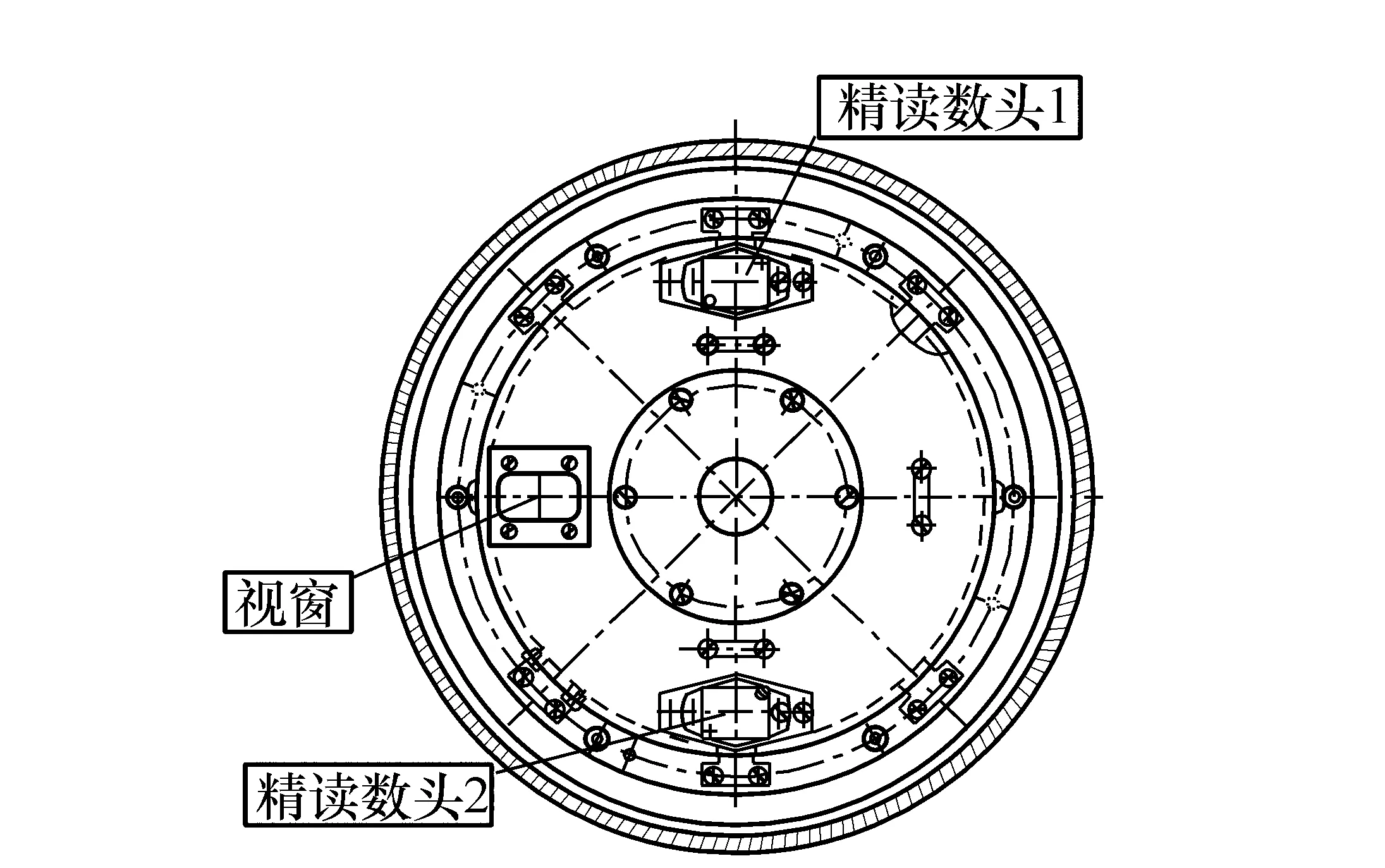
图3 读数头位置 Fig.3 Position of the reading head
图3中精1和精2读数头中的信号相加并取平均值,可以降低偏心带来的影响。
3.2 处理电路设计
为提高编码器在高速旋转时的实时性,应该选择一种高速细分的方法。传统细分方法中,实时性最高的是采用全硬件插补细分的移相电阻链细分。但是该方法每提高一个细分分辨率,硬件数量就需要增加一倍。因此移相电阻链不适合高分辨率的插补细分。锁相倍频细分法在动态转动下细分特性较好,但是在静态下误差较大,不适合检测设备上的应用。
GC-IP2000芯片是德国GEMAC公司生产的高速细分芯片。芯片内部具有输入信号差分放大及自动幅值调整。其插补系数最高可以实现2 048倍细分,输入信号最大频率可达260 kHz。通过对芯片寄存器的设置,可以使其通过SPI总线输出角度值或是直接输出两路正交方波信号。当芯片直接输出两路正交方波信号时,方波信号的频率是输入信号频率的512倍,通过对方波信号的四倍频计数、辨向和累加,即可得到当前编码器角度位置信息。芯片具有细分速度快,细分倍数高的优点。采用GC-IP2000细分芯片可以实现高分辨率、高速细分处理。细分电路原理图如图4所示。

图4 细分电路原理图 Fig.4 Schematic of subdivision circuit
由光电编码器接收管接收到的原始信号相位分别相差90°,如图3中的0、180、90、270,四路信号经过电压跟随器,直接进入GC-IP2000芯片。为减小放大电路带来的噪声和频响造成的失真,放大器采用AD公司生产的低噪声、高频响放大器ADA4148芯片。GC-IP2000芯片将原始差分信号0和180、90和270分别做差,得到sinθ和cosθ两路细分信号,θ为细分信号电角度。sinθ和cosθ信号可以通过芯片的视窗引脚SMON和CMON观察。经过芯片的处理,输出频率是输入信号512倍的两路正交方波信号A和B。同时根据零位信号REF输出信号Z。
为了提高细分电路的实时性,采用大规模逻辑门阵列(FPGA)对细分信号进行计数。通过对FPGA的编程使用,从方波信号的输入到角度二进制数据的输出几乎是实时的。FPGA对方波信号A和B的上升沿和下降沿都进行计数累加,形成了对512倍细分方波的四倍频,最终细分倍数达到2 048倍。
细分电路对编码器旋转一周输出的4 096个周期精码信号进行细分,每一周期细分2 048份,形成23位编码器,其分辨率为0.15″。
4基准编码器的快速误差补偿
提高动态特性检测装置中基准编码器的精度,能够使检测装置的精度也随之提升。因此对基准编码器的误差补偿是必要的。利用RBF神经网络进行误差补偿,可以不经过对编码器误差产生原因的分析,而直接通过对误差检测结果的逼近拟合进行误差补偿。RBF神经网络具有良好的自学习、自适应和非线性动态处理特性,可以高精度地逼近任何非线性曲线。在编码器误差补偿中,取得了良好的效果。
4.1 RBF神经网络原理
径向基函数(Radial Basis Function)神经网络主要由三层组成:输入层、隐含层和输出层。通常输入层节点将输入信号传递到隐含层,隐含层节点由高斯函数辐射状构成,输出层节点是简单的线性函数。RBF神经网络如图5所示。

图5 RBF神经网络原理 Fig.5 Principle of RBF neural network
设网络的输入为(x1,x2…xm),网络输出为(y1,y2…yp),那么隐含层第i个神经元的输入为:
(5)
式中:j=1,2…,m;i=1,2,…,n;w1ji为第j个输入神经到第i个隐含层神经元的权值,xj为第j个输入向量,bi为第i隐含层神经元的阈值。隐含层中第i个神经元的输出为:
(6)
式中:l=1,2,…,p,参数c为扩展常数,用以调节函数的灵敏度,b和c的关系为:c=0.8326/b,c的大小反应输出对输入的响应宽度,c值越大,神经元间的平滑度也越好。输出层第l个神经元的输出为:
(7)
神经网络根据已知的输入,重复训练网络直到满足误差要求,这种映射关系可以逼近任意连续函数。
4.2 RBF神经网络在高速误差补偿中的应用
编码器误差大小的变化,是由于编码器装调、信号的质量等因素引起,误差的变化趋势是不变的。编码器误差中包含系统误差和随机误差,其中系统误差是影响编码器精度的主要因素。同时系统误差也按规律变化。因此,可以利用误差补偿的方法消除编码器的系统误差,提高精度。
由于目前设备不能够实现对高分辨率编码器的全分辨率误差检测,只能对有限个数的采样点进行误差检测。因此将误差采样点处的角度值作为训练样本,将高精度检测设备在采样点处的角度值作为输出样本,通过对RBF神经网络各参数的调节,逼近真实角度,即可实现对编码器误差的预测及补偿。RBF神经网络快速补偿实现原理如图6所示。
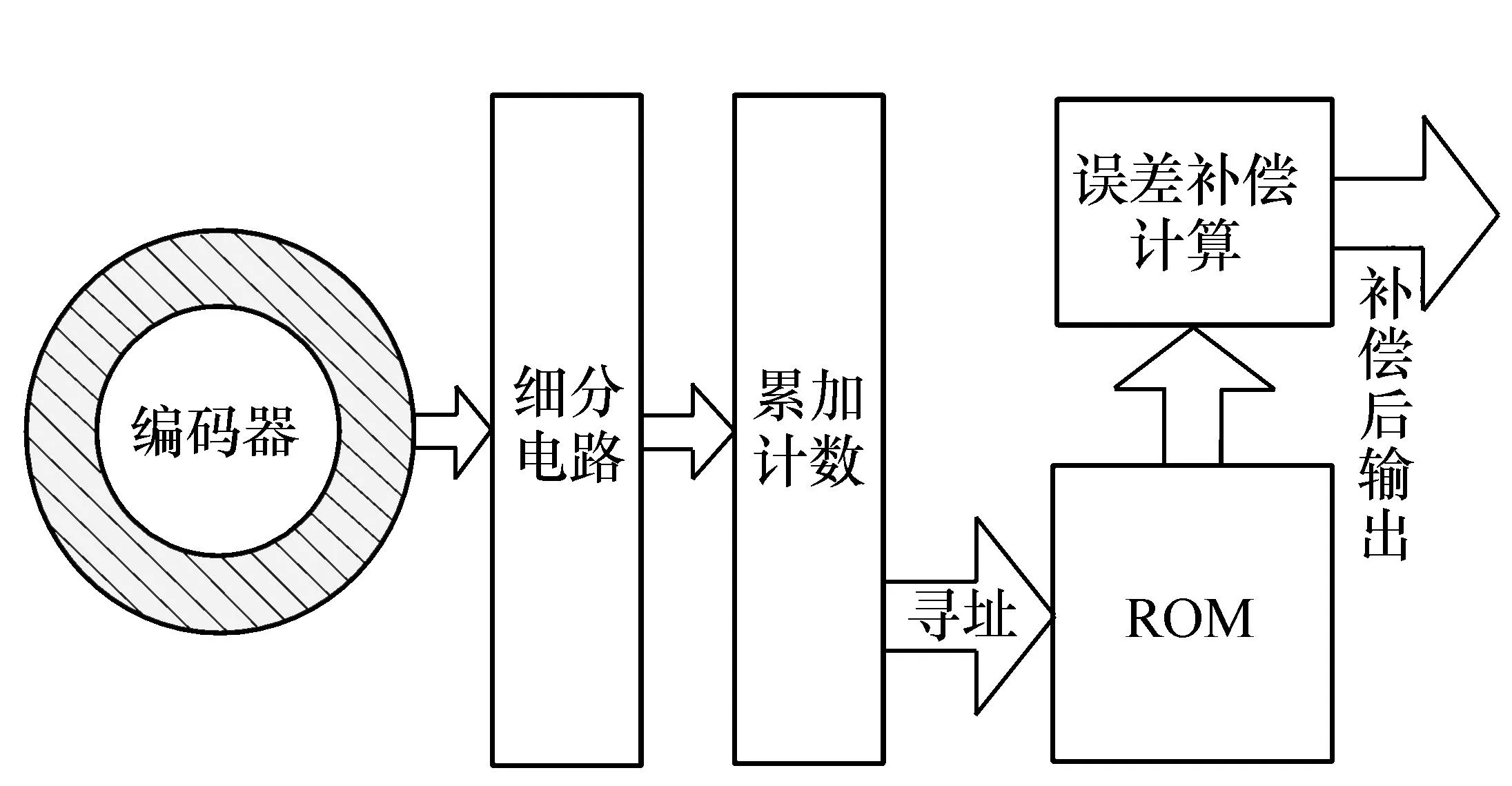
图6 误差补偿实现 Fig.6 Error compensation
将误差补偿应用在细分电路中,既要实现RBF神经网络的误差补偿,又要保证细分电路对编码器数据的快速处理。因此将RBF神经网络输出的数据存储在高速ROM中,将当前编码器输出角度值作为寻址地址,利用FPGA对高速ROM进行读写,从而实现了对编码器误差的高速补偿。
该方法不需要考虑神经网络隐含层神经元的数量带来的负担,可以直接利用MATLAB软件对角度数据进行拟合逼近,然后将得到的数据存储在ROM中,实现高速误差补偿。
5实验
5.1 归零实验
由于角度基准输出的二进制角度数据是通过对细分方波信号的计数累加得到的,在编码器转动过程中,一旦编码器输出不能及时响应,圆周内输出方波的周期数势必会减少。那么通过对编码器的归零实验,即可检测出细分电路在编码器旋转过程中是否能够及时响应。
实验利用直流电机带动编码器在10 r/s的转速下转动。转动一段时间后,检查编码器零度位置是否偏移。经过多次检测,编码器零位无偏移。表明该编码器在10 r/s转速下能够及时响应。
5.2 高速转动信号质量检测实验
编码器细分信号的质量直接关乎到编码器精度。在编码器转速为10 r/s时进行信号质量检测实验,即通过示波器对GC-IP2000芯片SMON和CMON视窗引脚输出的信号进行监视。10 r/s与低速转动下,信号sinθ和cosθ的Lissajous图形和正弦波形如图7所示。
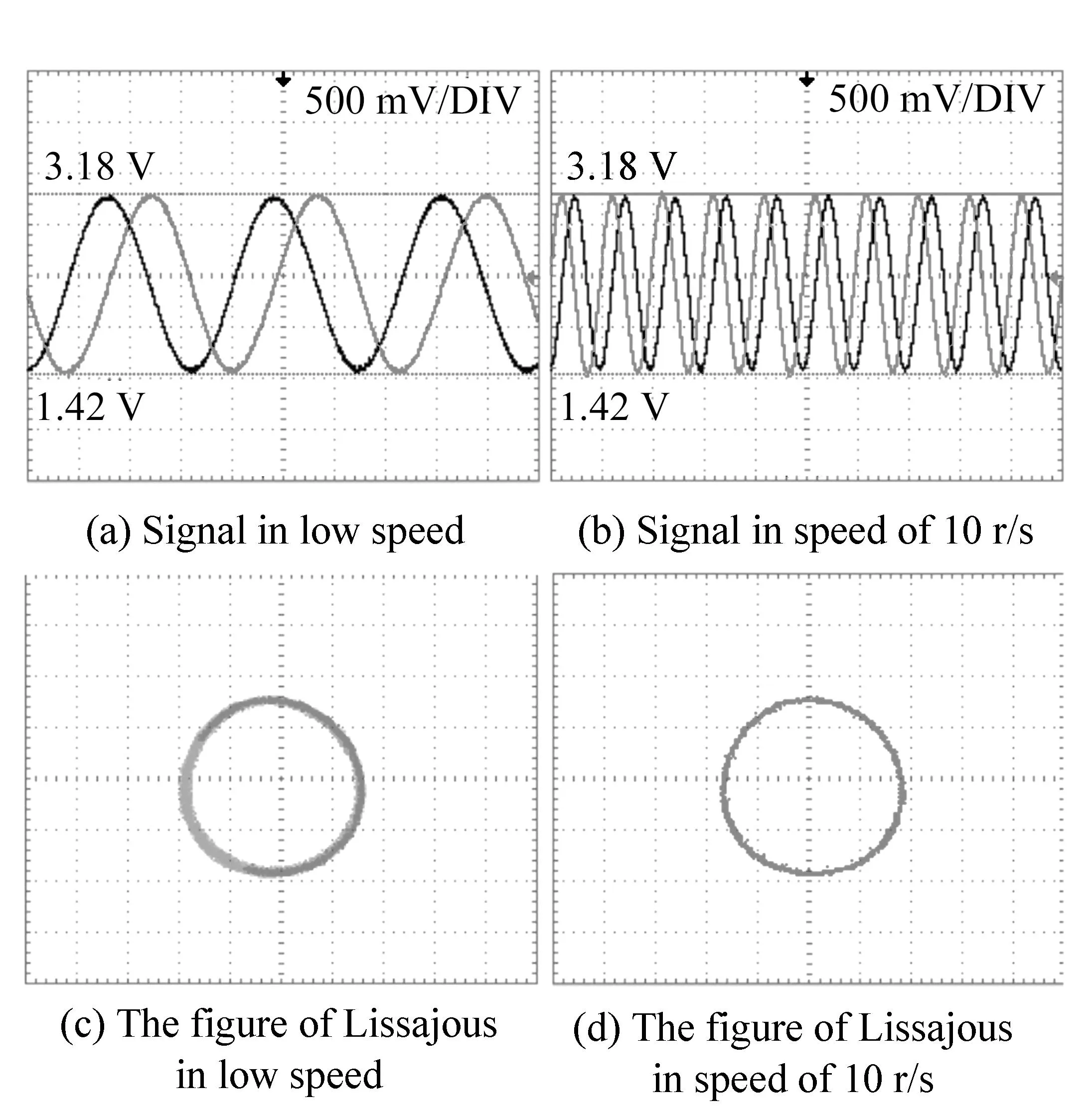
图7 细分信号 Fig.7 Signal of subdivision
图7中,(a)和(c)是低转速下sinθ和cosθ的波形图,(b)和(d)是10 r/s转速下的波形图。对比图7(a)和(b)发现,高低转速下波形的幅值都在3.18~1.42 V之间;对比图7(c)和(d)发现高低转速下的Lissajous图形无变化,近似于标准圆。
实验表明,编码器在高速转动下信号不发生变化,仍然可以准确细分。
5.3 精度检测实验
对编码器的误差检测采用自准直仪和24面棱体实现。检测原理如图8所示。

图8 多面体棱镜检测法 Fig.8 Principle of polyhedron detection method
将24面体与被检编码器同轴连接,调节多面体偏心及塔差后,利用自准直仪对编码器误差进行测量。实验时,每隔15°对该编码器进行一次误差检测。检测到的误差如表1所示。
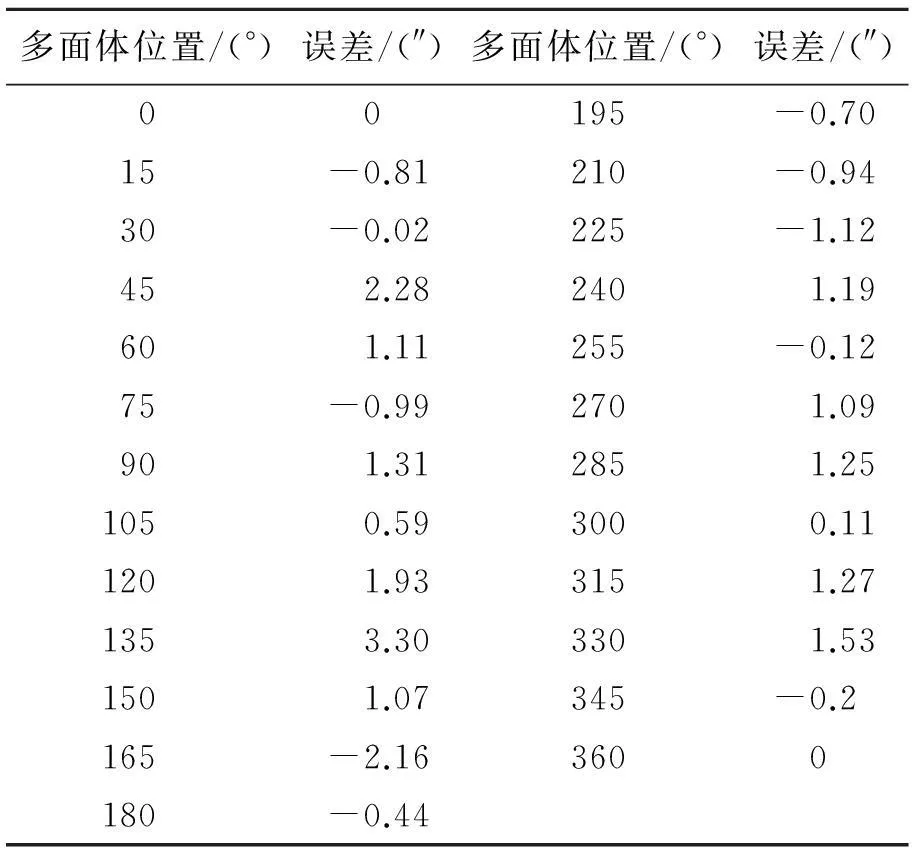
表1 误差检测结果
从表1中可以看出,该编码器误差最大值与最小值相差5.46″。利用贝塞尔公式来评估编码器精度:
(8)

5.4 误差补偿实验
根据表1中数据,令训练精度为0.000 1″,利用RBF神经网络进行训练。训练结果为:隐层节点具有24个,精度为2.088 21×10-31,符合训练要求。经过仿真,训练后的编码器误差曲线与编码器误差如图9所示。
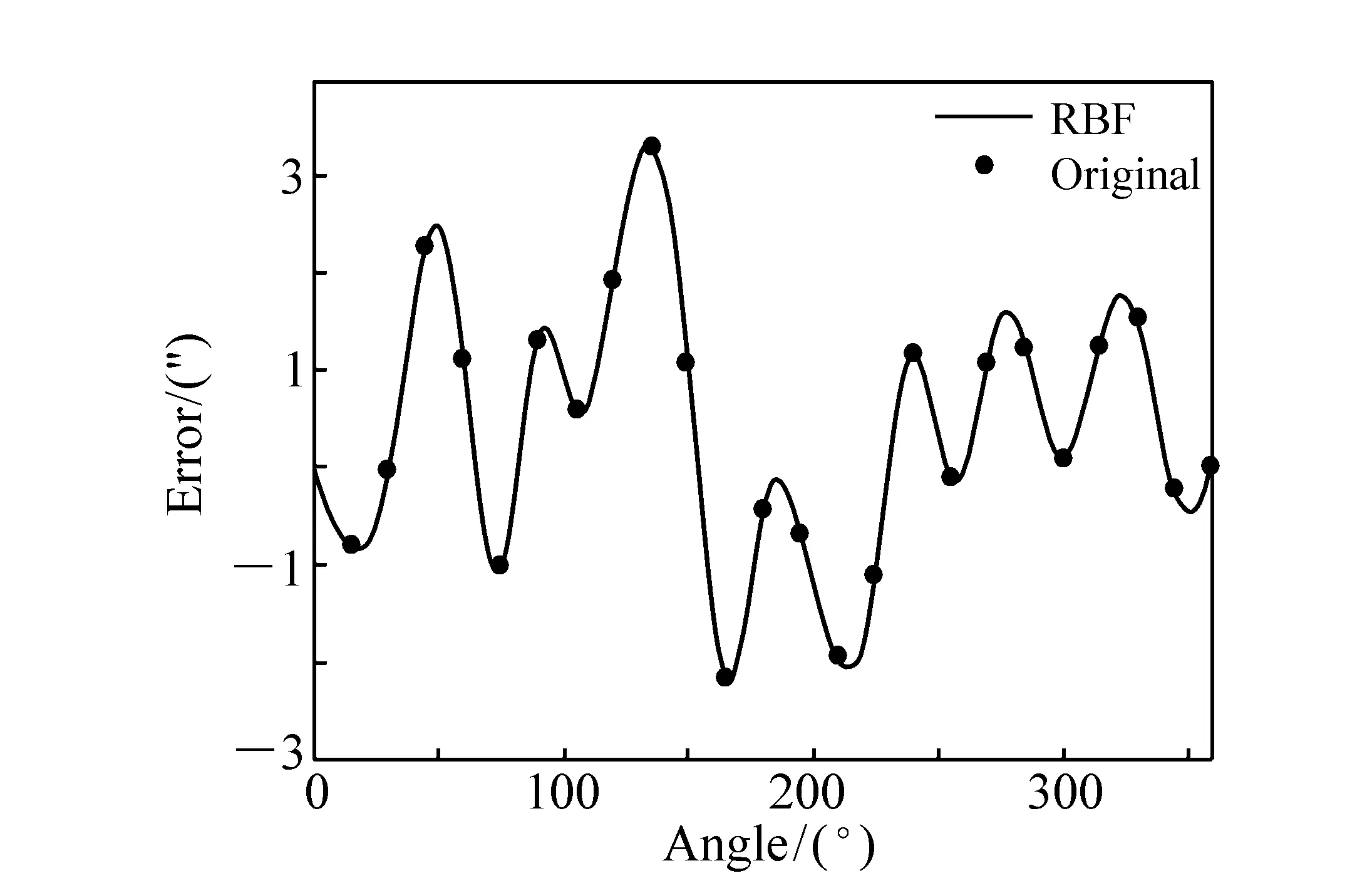
图9 误差对比 Fig.9 Error comparison
图中粗线为经过RBF神经网络预测得到的编码器误差,圆点为检测到的误差采样点。采样点处误差大小呈周期性变化,这是由于莫尔条纹信号的正弦性引起的。经过RBF神经网络训练后的误差与采样点误差重合。
将训练得到的数据存入高速ROM中,对补偿后的编码器进行检测,检测结果如表2所示。
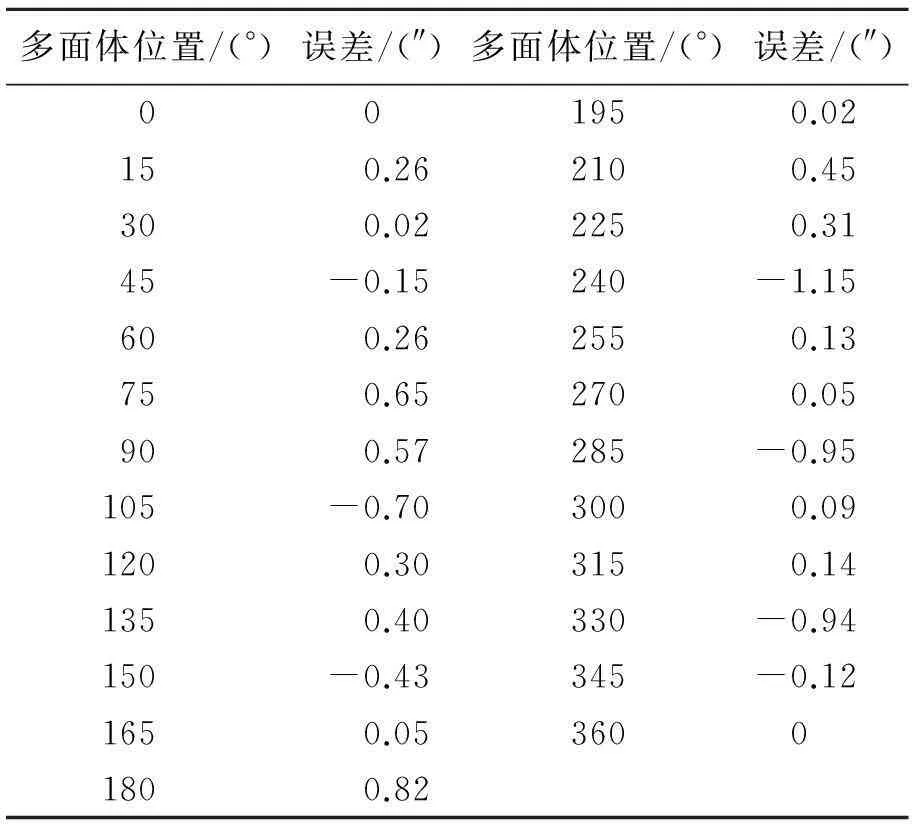
表2 补偿后误差
根据表2中的结果,计算得到补偿后的编码器精度为0.498 9″。
补偿后的误差与补偿前的误差曲线对比如图10所示。
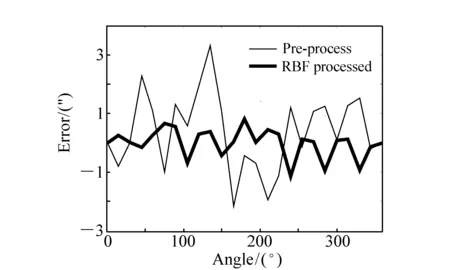
图10 补偿后误差对比 Fig.10 Error comparison after compensation
从图10中可以看出,经过RBF神经网络的误差补偿,基本消除了系统误差,使误差补偿后的精度提高了2.6倍。
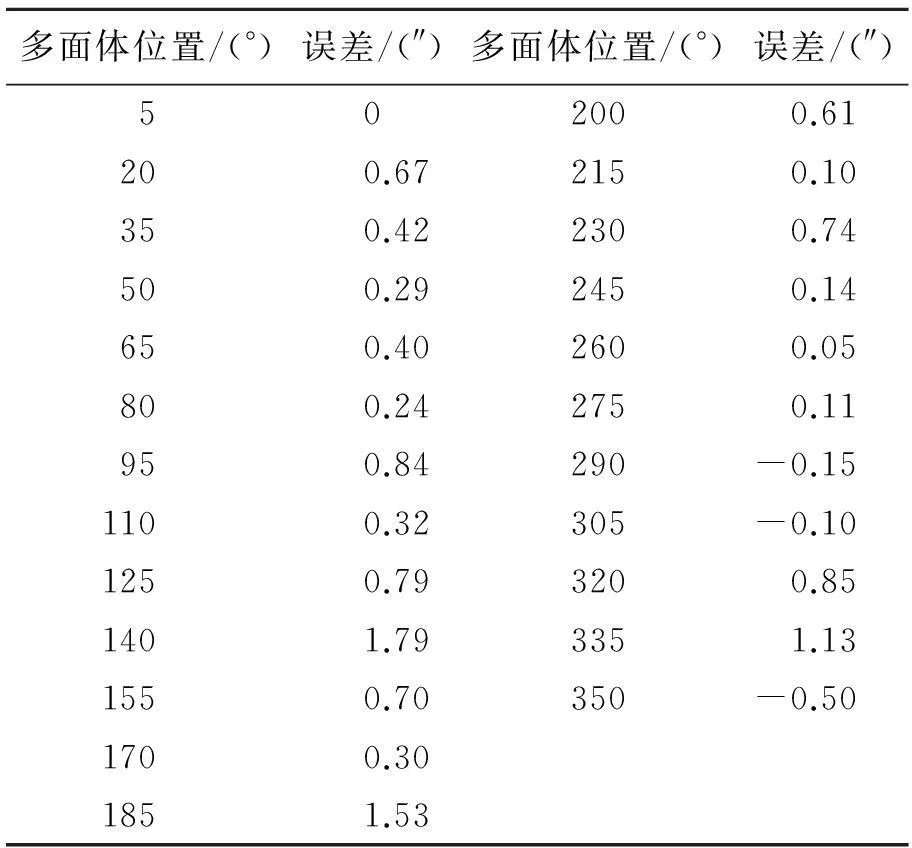
表3 测试结果
为测试本RBF神经网络的泛化能力,即当输入网络出现未训练的样本时,网络输出是否能映射出正确的输出。实验时,以编码器角度5°位置作为零点,每隔15°进行一次误差检测,用来检测误差补偿网络的泛化能力。检测结果如表3所示。
经过计算,表3中检测结果的精度值为0.526 4″。检测结果表明,补偿网络泛化能力良好。
6结论
光电轴角编码器以其高分辨率、高精度在各个领域内都得到了重要应用。在实际工作中,往往只重视编码器的误差精度而忽略动态响应对其工作的影响。在设计小型绝对式光电轴角编码器动态检测装置时,起初利用普通高精度编码器作为角度基准。在实际检测实验中发现,基准编码器频率响应对检测精度照成的影响非常大。为此,高精度、高实时性编码器的研制成功为动态特性检测设备的检测精度提供了保障。
采用高速细分电路和高速误差补偿方法,设计制作了高精度、高分辨率、高实时性角度基准编码器。实际测量表明,该编码器分辨率达到0.15″,精度优于0.6″,并且可以保证在10 r/s转速以下的逐分辨率输出。为小型光电编码器动态特性检测装置提供了重要支持。
参考文献:
[1]赵勇,苏显渝,张启灿.绝对编码光栅的相位细分及其在位移测量中的应用[J].光学学报,2011,31(8):0812005.
ZHAO Y,SHU X Y,ZHANG Q C. Phase subdivision of absolute coding grating and application in displacement measurement[J].ActaOpticalSinica,2011,31(8):081200.(in Chinese)
[2]王显军.基于SOC单片机的高集成度光电编码器电路设计[J].光学 精密工程,2011,19(5):1083-1087.
WANG X J. Circuit design for high nitrated photoelectric encoder base on SOC single chip[J].Opt.PrecisionEng.,2011,19(5):1083-1087.(in Chinese)
[3]万秋华,孙莹,王树洁,等.双读数系统的航天级绝对式光电编码器设计[J].光学 精密工程,2009,17(1):52-57.
WANG Q H,SHUN Y,WANG SH J. Design for space borne absolute photoelectric encoder of dual numerical system[J].Opt.PrecisionEng.,2009,17(1):52-57.(in Chinese)
[4]吴宏圣,曾琪峰,乔栋,等.提高光栅莫尔条纹信号质量的滤波方法[J].光学 精密工程,2011,19(8):1944-1949.
WU H SH,ZHENG Q F,QIAO D,etal.. Filtering method of improving quality of grating Moiré fringe[J].Opt.PrecisionEng.,2011,19(8):1844-1849.(in Chinese)
[5]包艳,杨德兴,李秉实,等.柔性变栅距光栅角位移传感器的精度分析与工艺实现[J].光学 精密工程,2011,19(8):1859-1866.
BAO Y,YANG D X,LI B SH,etal.. Precision analysis and process implementation of angular displacement sensor based on flexible varied line-space grating[J].Opt.PrecisionEng.,2011,19(8):1859-1866.(in Chinese)
[6]EVITON D B,KIRK J,LOBSINGER I. Ultra-high resolution Cartesian absolute optical encoder[J].SPIE,2003,5190:111-121.
[7]赵长海,万秋华,佘容红,等.24位绝对式光电编码器数据采集系统[J].光电技术应用,2010,31(3):468-471.
ZHAO CH H,WAN Q H,SHE R H,etal.. Data sampling system for 24 bits absolute type photoelectrical encoder[J].SemiconductorOptoelectronics,2010,31(3):468-471.(in Chinese)
[8]赵柱,续志军,王显军.基于运动控制技术的编码器自动检测系统[J].中国光学与应用光学,2009,2(2):134-138.
ZHAO ZH,XÜ ZH J ,WANG X J. An automatic detection system of encoder error based on motion control technology[J].ChineseJ.OpticsandAppliedOptic,2009,2(2):134-138.(in Chinese)
[9]万秋华.莫尔条纹动态细分误差的傅里叶分析评估方法[J].电子测量与仪器学报,2012,26(6):548-552.
WAN Q H. Fourier analysis assessment method for dynamic interpolation error of Moiré fringe[J].J.ElectronicMeasurementandInstrument,2012,26(6):548-552.(in Chinese)
[10]杨进堂,杨庆辉.莫尔条纹动态细分误差的测量[J].计量技术,1998,7:14-16.
YANG J T,YANG Q H. The detection of dynamic interpolation error of Moiré fringe[J].MeasureTechnique,1998,7:14-16.(in Chinese)
[11]李洪,冯长有,丁林辉.光电轴角编码器细分误差动态评估方法[J].传感技术学报,2005,18(4):927-930.
LI H,FENG CH Y,DING L H. Dynamic evaluation method for interpolation errors in photoelectric encoder[J].ChineseJ.SensorsandActuators,2005,18(4):927-930.(in Chinese)
[12]王显军.基于SOC单片机的高集成度光电编码器电路设计[J].光学 精密工程,2011,19(5):1083-1087.
WANG X J. Circuit design for high integrated photoelectric encoder base on SOC single chip[J].Opt.PrecisionEng.,2011,19(5):1083-1087.(in Chinese)
[13]赵长海,万秋华,王树洁,等.21位光电编码器数据处理系统[J].电子测量与仪器学报,2010,24(6):569-573.
ZHAO CH H,WAN Q H,WANG SH J,etal.. Data processing system of 21 bit photoelectric encoder[J].J.ElectronicMeasurementandInstrument,2010,24(6):569-573.(in Chinese)
[14]王显军.光电轴角编码器细分信号误差及精度分析[J].光学 精密工程,2012,20(2):379-386.
WANG X J. Errors and precision analysis of subdivision signals for photoelectric angle encoders[J].Opt.PrecisionEng.,2012,20(2):379-386.(in Chinese)
[15]FILATOR Y V,AGAPOV M Y,BOURNACHEV M N. Laser goniometer systems for dynamic calibration of optical encoders, optical measurement system for industrial inspection III[J].SPIE,2003,5144:381-390.
[16]WATANABE T,FUJIMOTO H. Automatic high precision calibration system for angle encoder[J].SPIE,2001,4401:267-274.
[17]艾晨光,褚明,孙汉旭,等.基准圆光栅偏心检测及测角误差补偿[J].光学 精密工程,2012,20(11):2079-2084.
AI CH G,CHU M,SUN H X,etal. Eccentric testing of benchmark circular grating and compensation of angular error[J].Opt.PrecisionEng.,2012,20(11):2079-2084.(in Chinese)
[18]朱帆,吴易明,刘长春.四读头法消除码盘偏心和振动对叠栅条纹相位测量的影响[J].光学学报,2011,31(4):0412008.
ZHU F,WU Y M,LIU CH CH. Elimination influence of grating encoder′s eccentricity and vibration to Moiré fringes signal by four reading heads[J].ActaOpticaSinica,2011,31(4):0412008.(in Chinese)

于 海(1987—),男,吉林敦化人,博士,助理研究员,主要从事光电位移精密测量及光电编码器的检测等方面的研究。E-mail:yuhai5158@163.com

万秋华(1962—),女,吉林长春人,博士,研究员,博士生导师,主要从事光电位移精密测量技术及高精度光电轴角编码器等方面的研究。E-mail: wanqh@ciomp.ac.cn
王树洁(1963—),女,吉林长春人,高级工程师, 1993年于吉林工业大学获得学士学位,主要从事光电编码器设计及光电位移精密测量等方面的研究。E-mail:wangsj_0710@sina.com
卢新然(1987—),男,辽宁本溪人,副研究员,2001年于东南大学获得学士学位,2008年于中国科学院长春光学精密机械与物理研究所获得硕士学位,主要从事光电编码器机械结构方面的研究。E-mail:luxinranciomp@yahoo.com

杜颖财(1977—),男,吉林长春人,硕士,助理研究员,2001年、2005年于哈尔滨工业大学分别获得学士、硕士学位,主要从事光电位移精密测量及高精度编码器等方面的研究。E-mail:ycdu@163.com
measurement of photoelectric encoder
YU Hai, WAN Qiu-hua*, WANG Shu-jie, LU Xin-ran, DU Ying-cai
(ChangchunInstituteofOptics,FineMechanicsandPhysics,
ChineseAcademyofSciences,Changchun130033,China)
Abstract:In the detection of photoelectric encoder′s dynamic characteristics, the quick response and the precision of reference encoder affect detection accuracy. A high precision and fast subdivision angle reference encoder is designed to achieve fast reaction and high precision. Firstly, the influence of insufficient angle reference on the detection of encoder′s dynamic characteristics is analyzed and time-delay is the main factor that influences the precision of angle reference encoder. Secondly, 23 bit angle reference encoder has been manufactured by structure and circuit devising. Lastly, the encoder error has been compensated by using RBF neural network with the detection of angle reference encoder. The encoder resolution is 15″, and it can guarantee the output speed in accordance with the required resolution at speed of 10 r/s. The precision proves to be less than 0.6″ while it was 1.30″ before error compensation. The error of peak to peak value is 2.5″. As the trails show, the developed reference encoder with the properties of high resolution, high precision and high real-time improves the detection precision of photoelectric encoder′s dynamic characteristics.
Key words:dynamic detection;angle reference;fast subdivision;high precision;error compensation
作者简介:
*Corresponding author, E-mail:wanqh@ciomp.ac.cn
中图分类号:TP212
文献标识码:A
doi:10.3788/CO.20150803.0447
文章编号2095-1531(2015)03-0447-09
基金项目:中国科学院知识创新工程领域前沿项目(No.O70Y32R070)
收稿日期:2014-12-11;
修订日期:2015-02-13
