UCAV最优筋斗机动实时指令生成设计
2015-03-15彭永涛刘林
彭永涛, 刘林
(西安飞行自动控制研究所 飞行器控制一体化技术国防科技重点实验室, 陕西 西安 710065)
UCAV最优筋斗机动实时指令生成设计
彭永涛, 刘林
(西安飞行自动控制研究所 飞行器控制一体化技术国防科技重点实验室, 陕西 西安 710065)
提出了基于时间最短的无人作战飞机(UCAV)筋斗机动动作实时轨迹生成方法。利用机载计算机预先装订的UCAV气动及三自由度飞机模型,实时生成具有迎角及法向过载保护的最优轨迹指令,同时采用经典控制方法进一步缩小跟踪误差,最终实现了UCAV所需的筋斗机动。仿真结果表明,该方法具有实时性强、生成轨迹易于跟踪控制、可有效保证飞行安全等优点。
无人作战飞机; 最优筋斗机动; 实时机动指令
0 引言
在飞机筋斗机动操纵过程中,一般从法向过载的指令生成序列及飞行员操纵规范进行描述[1],而当该方案在无人作战飞机筋斗机动实施过程中,由于气动及环境因素不确定的影响,很难做到指令的适应性,也很难保证无人作战飞机(UCAV)的飞行安全。另外一个值得注意的问题是,筋斗机动优劣的评估指标除了保证飞行安全外[2],还以时间最短为战术评估指标。本文提出了一种基于时间最短的指令生成算法,在确保飞行安全的同时,实现时间最短直筋斗机动。通过数字仿真,证实本文方法能够较为完善地解决这一问题。
1 控制策略
通过控制UCAV的速度、航迹倾角及航迹偏航角,即可实现对航迹的精确控制[2-4]。因此,利用三自由度的质点飞机模型就可以达到生成实时轨迹参考值的目的[5],即将UCAV三自由度的质点飞机模型及相关气动数据装载进机载计算机,通过机载软件实时计算生成动态轨迹指令。机动动作轨迹参考值解算使用的航迹坐标系中的飞机动力学方程为:
(1)
(2)
式中:m为飞机质量;V为空速;T为发动机推力;D为阻力;L为升力;γ为航迹角。
考虑到机载模型在无风条件下运行,因此,绕速度矢的滚转角γs由下式解算:
γs=arcsin[(sinγcosJ)/cosθ]
(3)
本文UCAV机动飞行控制是在控制增稳(CAS)回路(控制指令为法向过载指令)的基础上,加入实时机动指令构成的。控制UCAV做预期筋斗机动动作的控制策略如图1所示。由UCAV飞管决策系统根据对当前态势的感知,决策并指令UCAV进行机动;机动指令实时生成单元根据当前收到的UCAV位置姿态等信息,对机载UCAV模型进行初始匹配并启动实时仿真,生成期望轨迹,并向动态逆及PID控制单元提供相关期望数据;动态逆及PID控制单元根据期望数据和反馈的位置姿态信息进行控制律运算,然后向控制增稳单元输出机动指令控制量,进一步指令UCAV做出预期机动动作。
实现上述控制策略的关键在于UCAV模型的建立、UCAV对机载模型生成的机动指令跟踪。本文建立机载模型、引入机动时间指标,并结合经典PID和动态逆技术[6-7],在确保安全、提高机动能力的同时,实现UCAV对指令的良好跟踪。
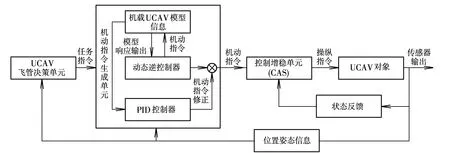
图1 UCAV筋斗机动控制策略结构图Fig.1 Control framework of the UCAV’s loop maneuver
2 筋斗机动时间指标要求
2.1 时间指标代价函数
评判作战UCAV常规机动性能好坏的一个重要标准是机动时间tk,tk越小则机动性能越好。在垂直面内进行筋斗机动时,tk可按俯仰角的变化给出,如下式所示:
(4)
(5)
式中:nz为法向过载;V为空速;φ为滚转角;θ为俯仰角;g为重力加速度。
UCAV俯仰角的测角范围为-90°~90°,滚转角的测角范围为-180°~180°。UCAV在筋斗机动过程中,其垂直平面可分为四个象限[8]:第一象限俯仰角为0°~90°,期望滚转角约为0°,滚转角摄动范围-90°~90°;第二象限俯仰角为90°~0°,期望滚转角为-180°或180°,滚转角摄动范围-90°~-180°或90°~180°;第三象限俯仰角为0°~-90°,期望滚转角为-180°或180°,滚转角摄动范围-90°~-180°或90°~180°;第四象限俯仰角为-90°~0°,期望滚转角为0°,滚转角摄动范围-90°~90°。因此,式(5)指标代价函数中,cosφ在第一和第四象限过程中为1.0,属正飞状态,此时,对于某个特定状态(该时刻假定速度不变),则时间对俯仰角的导数(dθ为正值)与法向过载nz成反比,即nz越大时间导数(dtk为正值)越小。在第二和第三象限过程中为-1.0,此时,对于某个特定状态(该时刻假定速度不变),则时间对俯仰角的导数(dθ为负值)与法向过载nz成反比,即nz越大时间导数(dtk为正值)越小。综上所述,由性能代价函数式(5)可知,如果期望筋斗过程时间最短,则需整个过程法向过载nz最大。
2.2 筋斗机动指令生成可行性分析
由式(5)可知,若使tk最小,需nz在筋斗过程中的任一俯仰角条件下达到最大,记为nzmax,则有下式成立:
(6)
当nzmax最大时,则根据气动计算公式可知升力系数CLmax最大,即有下式成立:
nzmax=[qS/(mg)]CLmax
(7)
式中:q为当前动压;S为机翼面积。
最大升力系数的获取可根据风洞试验和试飞数据修正的气动数据插值得到。一般UCAV的升力系数由高度、马赫数和迎角插值得到,可表示为:
CL=f(H,α,Ma)
(8)
在高度和马赫数一定情况下,在可用迎角范围内,升力系数与迎角成正比,即升力系数随迎角的增大而增大。因此为获得最大CLmax,需在可用迎角允许范围内使迎角达到最大值αmax。
3 筋斗机动指令生成
3.1 基于动态逆的过载指令生成
非线性动态逆方法可以直观地理解为:为了使系统输出获得某个期望值,将系统的输出假定为该期望值,反算系统需要的输入值。所得输入值为时间和状态变量的非线性函数,也就是所谓的非线性动态逆控制律。因此,将UCAV迎角的最大限制αmax假定为期望值,根据式(8)来反算系统需要的CLmax输入值,然后,根据式(7)来反算系统需要的nzmax输入值,最后,根据设计需要生成过载指令。整个过程如图2所示。
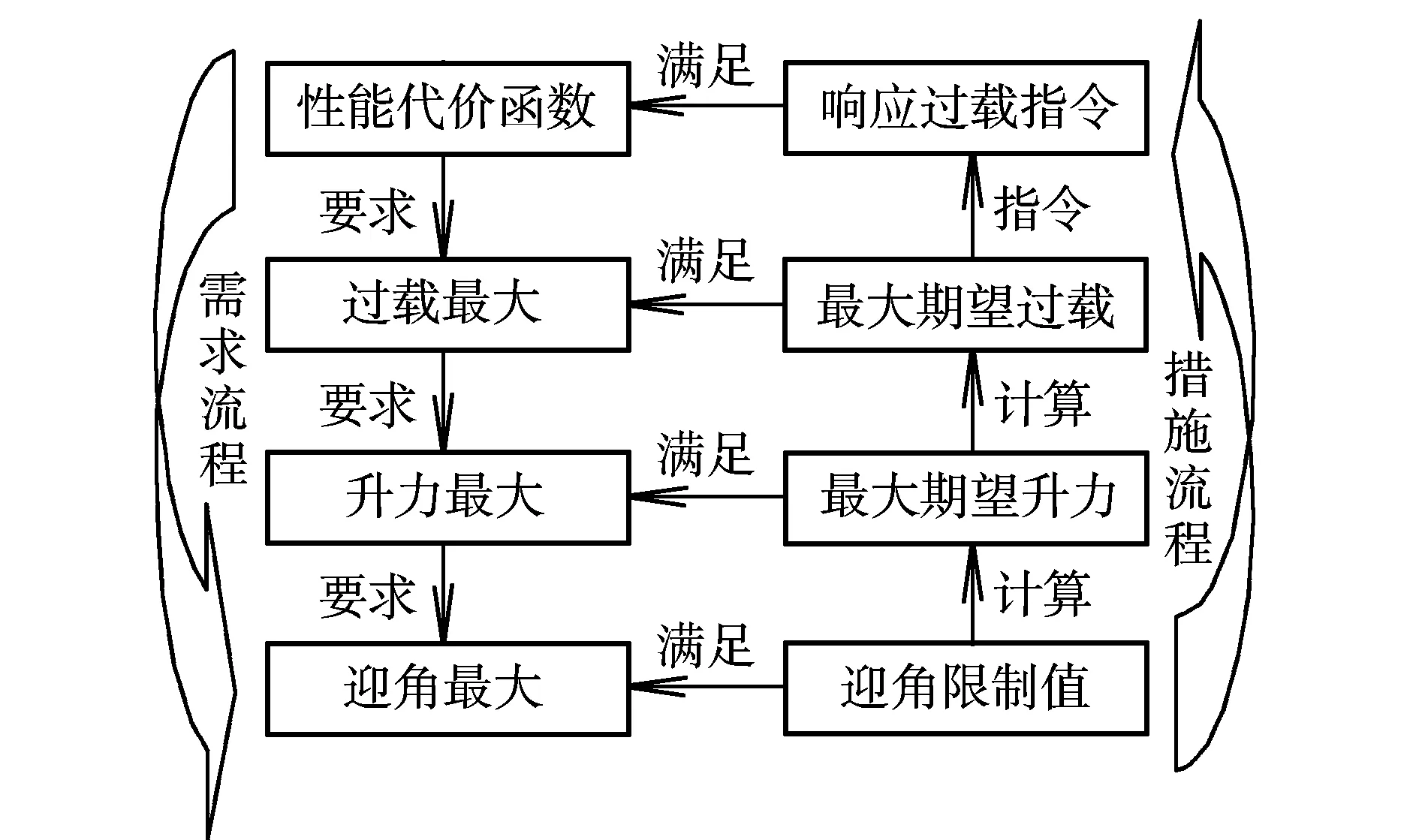
图2 筋斗机动指令生成过程Fig.2 Process of producing the loop maneuver command
3.2 基于PID控制的指令补偿
筋斗机动时由于指令动态变化,造成指令跟踪滞后,带来实际响应与机载UCAV模型的跟踪误差。因此,需对过载指令进行补偿,简化的补偿方法如图3所示。
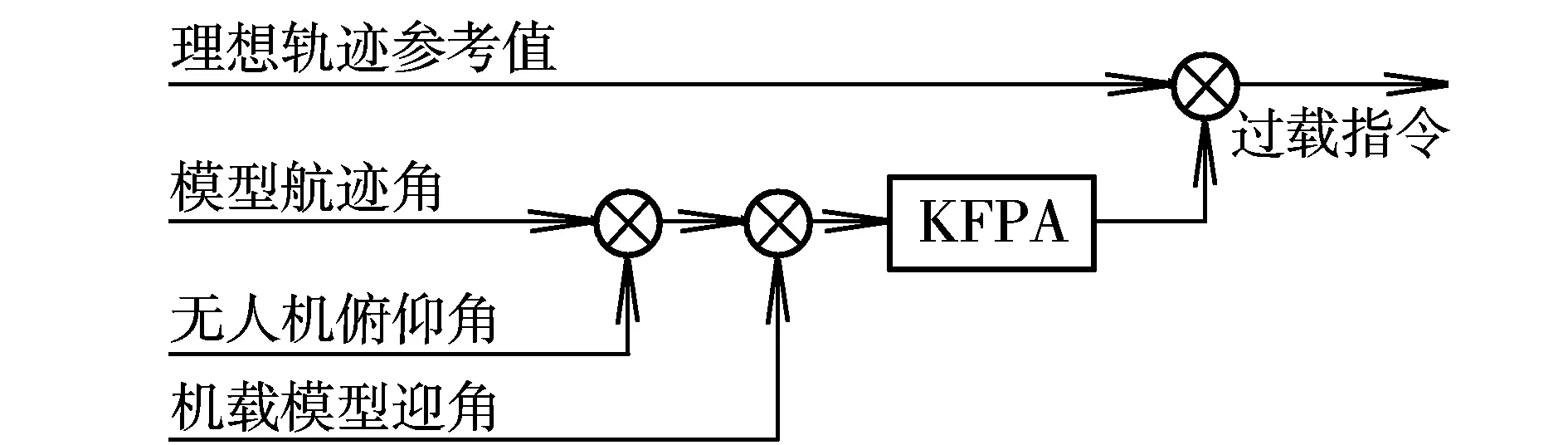
图3 筋斗机动PID补偿计算Fig.3 PID compensatory arithmetic of the loop maneuver
4 仿真验证
按如下步骤生成纵向过载指令:(1)选定UCAV筋斗机动最大允许迎角αmax,这里,进入筋斗执行段时αmax=20.0°。当机载模型航迹角经过第四象限,并接近平飞时,将AOA-LIM的取值淡化到平飞所需迎角。(2)计算最大过载指令nzmax,并根据nzmax仿真机载模型。(3)启动PID控制指令补偿计算,经指令限幅后,得到UCAV控制指令nzc,根据nzc驱动UCAV控制增稳单元(CAS),实现UCAV机动。
半物理仿真条件下,UCAV进入筋斗机动的高度为2 000 m,空速为220 m/s,仿真结果如图4所示。筋斗进入时间为445 s,退出时间为471.2 s,共持续约26.2 s。设计迎角限制值为20°,实际值最大约为19.5°,符合设计要求;另外,整个过程过载最大允许值为nzmax=5。仿真结果表明,整个过程响应过载符合设计要求。
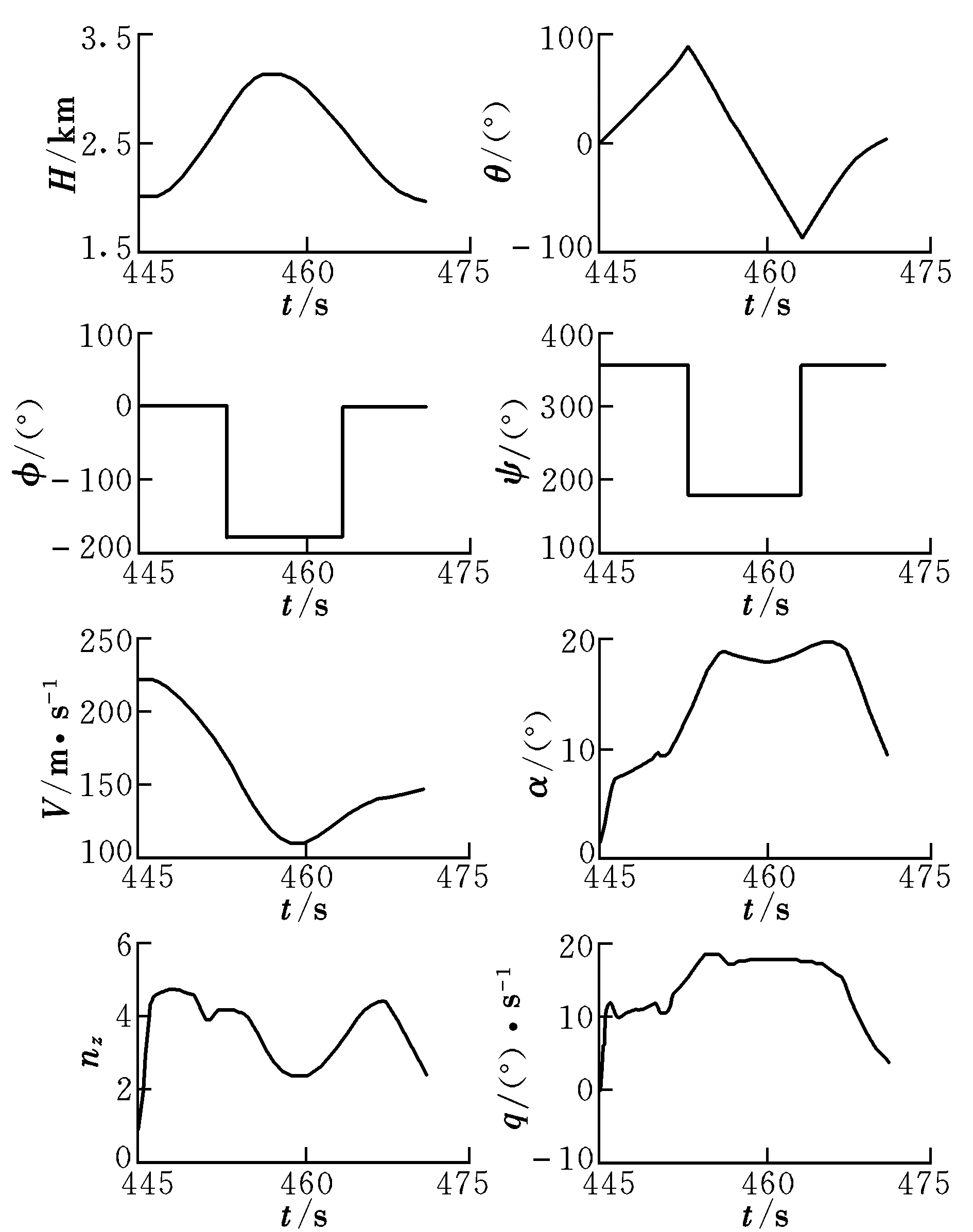
图4 UCAV筋斗机动仿真曲线Fig.4 Simulation curves of the UCAV’s loop maneuver
5 结束语
本文提出的基于时间最短指标要求的UCAV最优筋斗机动动作实时指令生成算法,不仅可以确保UCAV飞行安全,也可以有效实现筋斗机动的时间最短要求。该算法采用了三自由度的质点机载模型,在减少计算量的同时,获得了实时性及鲁棒性均较强的UCAV过载指令。仿真结果表明,基于时间最短指标要求的UCAV最优筋斗机动动作实时指令生成算法为UCAV筋斗机动动作的实现提供了一种新的思路和方法。
[1] 熊峻江,郑力铭,肖应超.现代飞行技术[M].北京:国防工业出版社,2011:36-42.
[2] 张翔伦,左玲,杨蔷薇.基于机动动作链的飞行品质评价方法研究[J].飞行力学,2006,24(3):13-16.
[3] 张翔伦,杨蔷薇.平台自主控制大机动鲁棒轨迹生成算法验证报告[R].西安:飞行自动控制研究所,2004.
[4] 杨蔷薇,占正勇.无人机指令生成器设计[J]. 空军工程大学学报:自然科学版,2010,11(3):21-25.
[5] 张翔伦,杨蔷薇.基于机动动作库的实时轨迹生成与仿真研究[J].飞行力学,2008,26(3):29-32.
[6] 谢蓉,王新民,李俨.超机动飞机动态逆-PID控制器设计[J].飞行力学,2009,27(2):67-71.
[7] Chandler P R,Pachter M.Research issues in autonomous control of tactical UAVs[C]//Proceedings of the American Control Conference.Philadelphia Pennsy lvania,1998:394-398.
[8] 左玲,张新国.用于大机动飞行仿真的四元数改进算法[J].系统仿真学报,2009,21(11):3018-3020.
(编辑:李怡)
Real-time command generator design for UCAV’s optimal loop maneuver
PENG Yong-tao, LIU Lin
(National Key Laboratory of Science and Technology on Aircraft Control,FACRI, Xi’an 710065, China)
A new method based on the shortest time for UCAV’s loop maneuver of path generation method in real time was presented. The optimal trajectory commands with the protection of angle of attack and normal load factor were created in real time by using the UCAV’s three degree of freedom aerodynamic model which had loaded in the computer. In order to reduce the tracking error, classical control methods were used at the same time. Finally, the loop maneuver of UCAV was achieved. Simulation results show that this method has very good real-time performance, and can easily track its path command. Moreover it’s safety for the UCAV’s flight.
UCAV; optimal loop maneuver; real-time maneuver command
2014-06-16;
2014-09-15;
时间:2014-11-18 16:56
彭永涛(1978-),男,陕西宝鸡人,博士研究生,研究方向为飞行控制系统及制导系统设计。
V279; V249.1
A
1002-0853(2015)01-0035-03
