基于运动控制卡的冲床辅助机械手研究
2015-03-15常德功
陈 东,常德功
(青岛科技大学 机电工程学院,山东 青岛 266061)
基于运动控制卡的冲床辅助机械手研究
陈东,常德功
(青岛科技大学 机电工程学院,山东 青岛 266061)
摘要:冲床上下料频繁、危险且要求准确定位,此对采用辅助机械手能准确放置工件,提高工作效率,降低劳动强度。为了实现冲床工件上下料及在2个工位间移动,采用了具有4个旋转副的四自由度冲床辅助机械手结构。利用D-H法求解机械臂运动学正反解算法,然后利用MATLAB软件计算并描绘出其工作空间。采用PC+Clipper运动控制卡及伺服驱动器等构建了其控制系统,使用速度和位置双闭环控制,并编写运动控制程序和PLC程序,实现了机械手上下料及在2个工位间准确和平稳地移动。
关键词:机械手;运动控制卡;冲床
机械手通常具有3个或3个以上可编程轴,通过编程实现搬运材料、零件或操持工具等多种作业。机械手特别适合配合自动化数控机床和柔性生产线使用,完成上下料和装配工件等辅助工作[1-3]。冲床上下料频繁,有一定危险性,且要求定位准确,自动上下料辅助机械手能避免人为操作失误,降低劳动强度,且上料定位准确,工作可靠,效率较高。尤其是对于大型冲床,其对工作强度及效率的改善显著。
机械手的控制可以采用单片机或PLC系统构建,也可以采用PC+运动控制卡的方法构建[4-5]。基于运动控制卡构建的机械手控制系统具有良好的开放性,对编码器和伺服驱动器等硬件的兼容性更好,开发成本较低;而且通过在上位机和控制卡上编程,可以实现更复杂算法的运动控制功能。
为了实现零件上下料及在2个工位间移动,冲床辅助机械手采用了四自由度机械臂,并采用Clipper运动控制卡和工控机构成开放式控制系统。
1辅助机械手机械结构研究
辅助机械手具有4个自由度,即吸盘旋转、小臂俯仰、大臂俯仰和腰部旋转,能够组合完成前伸、抓取和移动到指定工位等运动。
本机械手结构如图1所示,具有腕、肘、肩和腰共4个旋转关节。底座上的腰关节转轴铅垂,肩关节、肘关节和腕关节的转轴都是水平的且相互平行。这种机械手结构紧凑,工作空间大,符合冲床辅助机械手的运动要求。为减小冲床振动对机械手定位精度的影响,应将其安装在冲床附近地面上。

图1 机械手结构图
冲床抓取工件为约1 kg的薄壁类板件,所以选取H2311型电磁铁吸盘吸附,不需要独立气源,对工件表面要求低。
因为机械手负载不大,谐波减速器具有传达比大和精度高等优点,所以肘、肩和腰关节回转运动都采用伺服电动机联接谐波减速器传动的形式,肩、腰部选择减速比为100的谐波减速器XBS-40,肘部选择传动比为125的XBS-50,腕关节采用伺服电动机连接同步楔形带减速的传动形式。腰、肩关节处采用三菱HF-SP102伺服电动机,肘、腕关节处采用HF-SP52伺服电动机。
2辅助机械手工作空间及运动学反解算法
在臂长等结构参数确定的情况下,由各关节转角位置计算出末端吸盘位置为运动学正解算法;反之,由末端吸盘位置计算出各关节转角位置为反解算法。利用D-H法,可以通过坐标的变换建立辅助机械手的正解方程。
机械手的工作空间立体图如图2所示。工作空间是吸盘所有能够达到的空间位置的坐标集合,应该覆盖工作要求的关键点。冲床辅助机械手的运动轨迹的关键点为回零点(0,900,500),毛坯抓取点(400,700,540),工位1的抓取点(400,1 400,540),工位2的抓取点(-400,1 400,540),成品放置点(-400,700,540)。经过这些点,走完1个循环分为13段的路程,先在XOY平面中平移,再沿Z轴上下移动。根据机械手运动学正解方程,利用MATLAB软件,通过连续代入各关节转角参数,获得吸盘的位置,计算描绘出其工作空间。辅助机械手工作空间仿真图可以覆盖回零点、上下料和两工位点等关键点,满足设计要求。
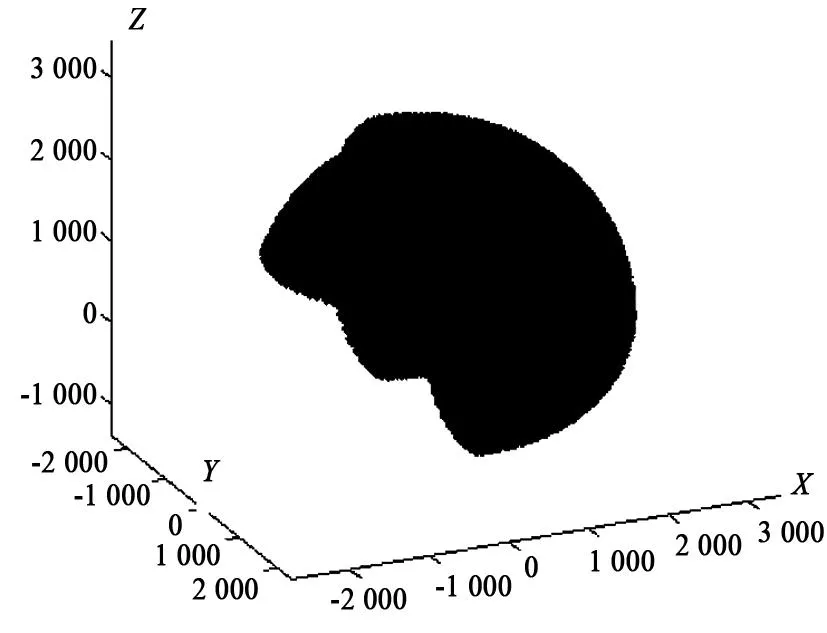
图2 机械手的工作空间立体图
求解每个关键点的运动学反解,用于点点之间移动的运动控制程序编写。在MATLAB软件中建立一个函数,函数定义为:[p,t]=stept(tstart,tend,pstart,pend,tstep)。参数含义依次为起始时间、终止时间、起始位置、终止位置和步长。上述13段路径以0.01 s为步长使用该函数进行插值计算,从而得到吸盘到达上述关键点时各个关节的关节转角参数值。
3辅助机械手控制系统硬件设计
辅助机械手控制系统采用PC+运动控制卡的开放式架构实现。相对于采用PLC等其他控制方案,运动控制卡的运算速度更快,且能自编运动控制算法,对编码器和伺服驱动器的兼容性更好,模块化的架构也更便于设计和维护。
Clipper运动控制卡是Delta Tau公司开发的兼顾经济性与性能的运动控制卡,能实现四轴的运动控制,与计算机之间采用网线连接,便于长距离分布式控制。网线利用568A反线接法,传输速率为10 Mb/s。
机械手控制原理结构图如图3所示。传动关节码盘反馈正交编码信号至Clipper卡,形成位置闭环,实现精确位置控制;电动机尾部编码器反馈编码信号至伺服驱动器,形成速度闭环,实现平稳的运动控制,避免在搬运薄壁工件过程中产生振动。这种双闭环的控制能实现冲压件既精确又平稳的运动控制。伺服系统选择日本三菱MR-J3系列驱动器及配套电动机。

图3 机械手控制原理结构图
4辅助机械手控制软件设计
辅助机械手控制软件分为6个功能模块:系统初始化程序、位姿监控程序、正反解算法程序、运动控制程序、PLC逻辑控制程序、示教和再现程序。机械手控制软件程序模块框图如图4所示。

图4 机械手控制软件程序模块框图
系统初始化程序完成Clipper变量初始化,并设置PLC程序运行或停止运行;位姿监控程序实时把机器人各关节角度采集上传,并由此计算出末端的位姿状态,在上位机显示这些参数;PLC逻辑控制程序在后台循环执行,主要实现对电动机使能、限位和伺服报警等外部数字量信号的监控,以及对内部程序执行情况与变量状态变化的监控;示教程序实现示教模式时的运动和动作,再现程序可实现示教时多个运动连续进行;运动控制程序由很多基本的运动控制程序组成,复杂的运动可以调用它们组合实现,单关节角度运动程序采用相对运动模式命令INC实现,用于示教模式下各关节的调整,关节运动停止程序由“&n a”命令实现,“n”对应4个电动机,“a”为电动机停止运动指令,多关节角度运动程序采用绝对运动命令ABS,由P211~P214 四个变量存储电动机到达的角度,多关节同时停止程序使用“&n a”命令停止坐标系“n”中所有4个电动机的运动,快速回零运动程序采用绝对坐标下“RAPID”快速运动命令实现;运动学正反解算法程序可以被其他PMAC程序调用进行运算,运动学反解算法程序用Q11、Q12和Q13变量存储末端吸盘直角坐标位置,利用Q14、Q15和Q16变量存储绕各轴转角,再根据运动学反解算法矩阵求得4个关节转角值,存入P1~P4变量。
5结语
冲床辅助机械手采用PC+Clipper运动控制卡的开放式架构来实现,减少了开发时间和成本。关节码盘脉冲信号反馈至Clipper卡,电动机编码器反馈至伺服驱动器,这样实现的速度与位置双闭环既能实现精确位置控制,又可以平稳搬运薄壁工件,避免振动。
参考文献
[1] 李胜多.基于 PLC 和组态王的搬运机械手控制系统的设计[J].农机化研究,2010(11): 141-145.
[2] 李荣丽.基于PLC的上下料机器人控制系统设计[J].电气自动化,2007(2):58-59.
[3] 王珂娜,黄文梅,刘红显.基于PCI运动控制卡的开放式焊接机器人研究[J].组合机床与自动化加工技术,2006(12):8-14.
[4] 张连新.基于PMAC的开放式弧焊机器人控制系统[J].焊接学报,2003,24(6):85-88.
[5] 苏海新,韩宝玲,罗庆生,等.基于PMAC的工业码垛机器人控制特性研究[J].机械与电子,2009(9):57-60.
责任编辑郑练
Research on Punch Auxiliary Manipulator based on Motion Control Card
CHEN Dong, CHANG Degong
(College of Electromechanical Engineering, Qingdao University of Science and Technology, Qingdao 266061, China)
Abstract:Loading and unloading of workpiece on punch are frequent, dangerous and accurate positioning, so using manipulator is beneficial to improve work efficiency, reduce labor intensity while the workpiece is placed accurately. The manipulator structure has four revolute joints to realize workpiece loading, unloading and movement between two stations. D-H method was adopted to get forward and inverse kinematics algorithm, work space was calculated and diagramed by MATLAB software. PC+Clipper motion control card was used to construct the control system of manipulator. The workpiece loading and unloading, movement between two stations can be realized by motion control programs and PLC programs.
Key words:manipulator, motion control card, punch
收稿日期:2014-06-04
作者简介:陈东(1973-),男,博士研究生,主要从事数控技术及智能机械等方面的研究。
中图分类号:TH 39
文献标志码:A
