基于滑模变结构控制的Buck变换器研究
2015-03-15李美芳军2
李美芳,尹 军2
(1.山西大学电力工程系,山西太原030013;2.山西太钢不锈钢股份有限公司,山西 太原030003)
0 引 言
近年来,在电力电子变换器领域,为进一步提高变换器性能,各种先进控制策略以其优良的特性得到广泛的研究。滑模变结构控制[1,2]简称滑模控制(Sliding Mode Control,SMC)是变结构控制的一种有效控制方法,对电力电子开关变换器非线性特质具有天然的适用性,采用滑模变结构控制的变换器具有稳定范围宽、动态响应快、鲁棒性强、控制实现简单等优点,成为研究的热点。
文献[3,4]以Buck变换器为例,研究稳态输出电压误差与边界层的关系,滑模系数的选择原则,以及全局滑模系数的约束条件,文献[5]将精确反馈线性化与滑模变结构控制相结合,并在DC/DC变换器上进行了验证。文献[6]设计了一个工作频率在520 k Hz,基于自适应电压调节的数字滑模控制器DC/DC变换器。本文以Buck变换器为对象,研究了滑模电压控制的实现方法,并进行仿真和实验验证。
1 Buck变换器状态空间描述
图1为滑模电压控制的Buck变换器原理图,选取输出电压误差和输出电压误差的变化率为两个状态变量。

图1 SMC-Buck变换器原理图
在CCM电流连续模式下,状态变量可以表示为

C,L,RL分别为电容、电感和瞬时负载电阻;uref和βvo分别为参考电压瞬时值和检测到的输出电压瞬时值;u=1或u=0为功率开关Sw的开关状态。将上述方程对时间求导,得到状态空间模型为

2 切换函数确定
在滑模控制中,控制器运用一个开关函数来确定系统的输入状态。对于滑模电压控制来说,开关函数u可以根据控制变量x1、x2,运用下面切换函数确定[7]。

式中,α为待设计的控制参数,称为滑动系数。
令σ=0,可得到斜率为-α的切换线,将相平面分为两个区域,每个区域对应着一个开关状态,开关状态引导相轨迹向切换线移动。对于降压变换器的2阶系统,控制律的基本形式为

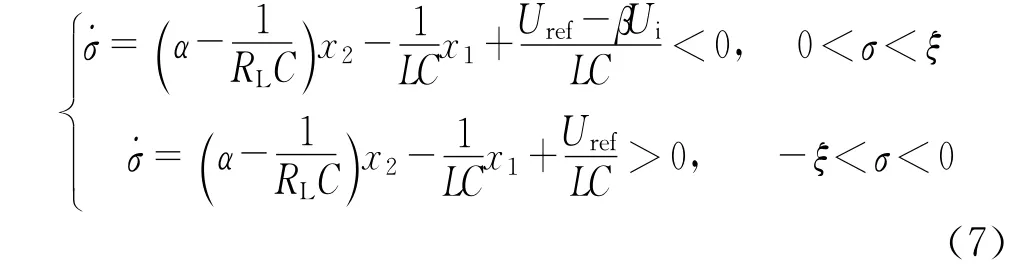
式(4)的控制律使系统运行轨迹趋向切换线的一般性要求得到满足,然而,为确定系统运动轨迹维持于滑动线上,系统必须遵守由李雅普诺夫定理推导出系统渐进稳定性的存在条件,即

将式(3)对时间求导代入上式,可得到滑模控制存在的条件为

式中,ξ为任意小的正数,将式(2)和(4)代入式(6),不等式变为
此外,求解式(3),可以得到

式中,x1(t0)为任意时刻t0的电压误差。从此式可以看出,在滑模控制器设计过程中,α的选择需综合考虑存在条件和一阶时间常数τ=1/α的动态响应问题。
因此,为了使系统既具备快速的动态响应又具有足够大的滑动模态区,将α设置为式(9)比较恰当,注意α必须为正。

3 SMC-Buck变换器的仿真与实验
3.1 实验设计
在实际中,为了解决理想滑模控制开关频率无限高和抖振的问题,便于变换器的设计和元器件的选择,必须对变换器的开关频率加以限制。控制变换器的开关频率,可以引入边界条件和滞环,将式(4)的控制律重新定义为:
但采用滞环限制开关频率,会产生变化的开关频率,给变换器的设计带来困难。为此,必须明确滞环宽度κ和开关频率fs之间的关系。滞环较宽时,开关频率低,跟踪误差大;滞环较窄时,跟踪误差小,但开关频率高,开关损耗大。
为对前面所述的理论进行验证,SMC-Buck变换器设计参数如表1。

表1 Buck电路设计参数
图2滑模控制器主要由电压跟随器Ui,差分放大电路UV,UD和比较器构成的滞环US组成。与大多数常规方法一样,β为输出电压Uo检测增益。电流互感器与电容串联,检测电流iC。参数的计算是在连续导电模式下进行的,Ui的变换范围是13~30 V,ir的变换范围是0.5~4 A。纹波电压的最大峰值为50 mV。
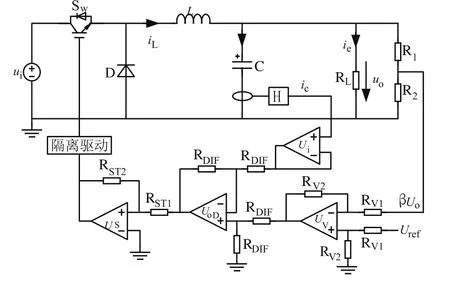
图2 标准SMC-Buck变换器

本设计中实际电感Lact=120μH,在额定参数相对不变的情况下,可以更换不同的电感值L使滞环宽度κ最好保持在0.1 VHz-1H-1≤κ≤0.2 VHz-1H-1范围内。
3.2 仿真研究
PSIM(Power Smulink)是电力电子领域针对性较强的专用仿真应用软件包;主界面中的电力电路、控制电路、传感器等模块库为电力电子电路的解析,控制系统的研究提供了强有力的仿真环境。同时其图形观
给定参考电压Uref=3.3 V,电阻RV2=20Ω,RV1=33 kΩ,RDIF=10 kΩ,RST1=110Ω,RST2=12 kΩ。用迟滞比较器来调节滞环宽度,U+CC和U-CC分别为比较器的正、负电源。测界面的Choose X-Axis Variable选项设置为分析非线性系统的相图绘制提供方便。
按照上述参数对SMC-Buck变换器进行了仿真,图3、4为在额定负载6Ω情况下,启动时波形,图4为切换线σ=0实际运行曲线,图5为两状态变量相图。
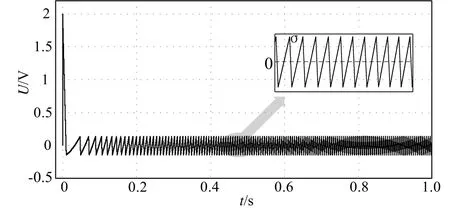
图3 启动到稳态时SMC-Buck切换线
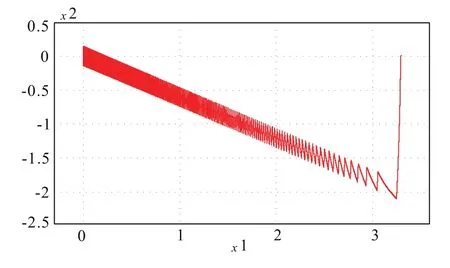
图4 两状态变量x1、x2相图

图5 负载变化时,输出电压、电流曲线
图5为负载6Ω突到3Ω时,仿真的输出电流电压曲线,可见当负载发生较大扰动时,控制对象输出电压基本保持不变,保持很强的鲁棒性。
3.3 实验结果
图6为SMC-Buck实验结果,右侧图为左侧的放大视图,四通道中ch1为输入电压,ch2为开关管Sw的驱动电压vgs;ch3为实验中切换线运动轨迹,可见在穿越切换线σ=0时,开关管Sw关断状态改变。实验输入24 V,输出12 V,满足期望要求,验证了对滑模变结构控制方法理解的正确性。

图6 SMC-Buck实验结果
4 结 论
滑模控制是一种优越的开关反馈控制系统,应用在开关变换器上可以达到很好的效果。本文将滑模变结构理论在Buck变换器上进行了实践,滑模电压控制器设计和实现比较简单,参数可以用数学公式精确地计算出来。通过仿真实验结果来看,滑膜变结构控制器是在大信号变换器模型的基础上设计的,具有较强的稳定性和鲁棒性。
[1]高为炳.变结构控制的理论及设计方法[M].北京:科学出版社,1996.
[2]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[3]倪 雨,许建平.准滑模控制开关DC-DC变换器分析[J].中国电机工程学报,2008,28(21):1-6.
[4]倪 雨,许建平,王金平,于海坤.滞环调制全局滑模控制Buck变换器设计[J].中国电机工程学报,2010,30(21):1-6.
[5]乐江源,谢运祥,洪庆祖,张 志,陈林.Boost变换器精确反馈线型化滑模变结构控制[J].中国电机工程学报,2011,31(30):16-23.
[6]Guannan Xu,Chen Jia,Chun Zhang,Zhihua Wang.A digital sliding mode controller for switching power supply converter[C].IEEE 9thInternational Conference on Digital Object Identifier,2011:994-997.
[7]R Venkataramanan,A Sabanovic,S Cuk.Sliding mode control of DC-to-DC converters[C].Proceedings IEEE Conference on Industrial Electronics,Control and Instrumentations,1985:251-258.
[8]Siew-Chong Tan,Yuk-Ming Lai,Chi Kong Tse.Sliding mode control of switching power converter techniques and implementation[M].Florida:CRC press,2012.
