基于电流预测控制的电动汽车用PMSM 控制器设计
2015-03-12洪俊杰陈思哲郭壮志李惜玉黄旭珍
洪俊杰,陈思哲,郭壮志,李惜玉,黄旭珍
(1.广东工业大学,广州510006;2.南京航空航天大学,南京210026)
0 引 言
我国汽车行业石油消费量占全国石油总消费量1/3 以上,在石油供应紧张、节能减排任务艰巨的大背景下,发展电动汽车十分紧迫[1]。目前我国已经超越美国成为CO2第一排放大国[2],在外交谈判中,生态环境和全球气候变暖将成为沉重的包袱。2008 年,我国汽车保有量约6 467 万辆,碳排放高达4.5 亿吨,按照目前汽车的保有量增长速度,到2020年,我国汽车保有量将增加到1.5 亿辆,碳排放则将高达10 亿吨。
在国家倡导节能减排、建设低碳城市的背景下,向新能源汽车转型是我国发展低碳城市的重要途径之一。与传统燃油汽车相比,电动汽车具有排放少、效率高、削峰平谷作用的优点,加之我国具有丰富的锂资源和国家政策支持,电动汽车将成为我国新能源汽车转型的首选。
电动汽车三大关键技术包括整车技术(包括底盘、车身轻量化技术)、电池技术、电机与控制技术,同时,永磁同步电动机(以下简称PMSM)与其他类型电机相比,具有明显优势[3],本文将展开对车用PMSM 控制器的研究。
文献[4]采用矢量控制的方法控制车用PMSM,可以看到电机电流波形较好,但并未看到其转矩或转速控制效果。文献[5]则采用了直接转矩控制PMSM,更加适合于电动汽车的应用工况,不过因为直接转矩控制中采用了滞环比较器,转矩和磁链存在高频干扰不可避免。相比较其他控制方法,电流预测控制方法具有预见性和目的性,且具有高动态响应、易实现,甚至理论上可以实现零电流误差控制的优点[6],特别适合于要求电流控制器具有高动态响应能力的系统。电动汽车通常对电机驱动控制系统的快速响应特性有较高的要求,而对其稳态精度没有太高的要求(因为折合至电机控制器输出端的负载惯量较大,可以滤除一定的高频噪声),因此电流预测控制方法是理想的选择。
本文将以PMSM 为控制对象,以电流预测控制为方法,分别从硬件和软件两方法设计控制器。
1 PMSM 的电流预测控制
1.1 PMSM 的模型
PMSM 直交轴电流表达式:
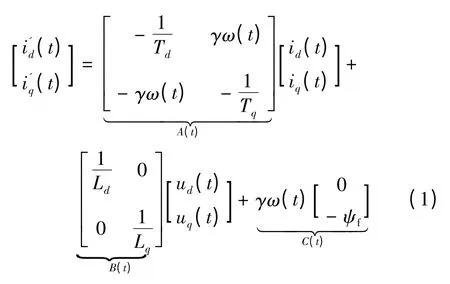
式中:Td,Tq,γ 为Td=Ld/R,Tq=Lq/R,γ =Lq/Ld,且Ld,Lq,R 分别为电机直轴电感、交轴电感与直交轴绕组电阻;ω(t)为电机的动子运动速度;ψf为电机的转子永磁体磁链;id(t),iq(t)为电机的直、交轴电流;ud(t),uq(t)为电机的直、交轴电压。
记I(t)=[id(t),iq(t)]T,V(t)=[ud(t),uq(t)]T。
PMSM 的连续时间系统模型可以简化:

假设伺服控制器的采样周期为Ts,并对式(2)进行离散化,可得PMSM 的直交轴电流的离散时间表达式:

1.2 电流预测控制的实现
在第k 个时刻,将8 个电压矢量Vj[k],j∈{0,1,…,7}(参考文献[7])分别代入式(3),可得:

因此对于PMSM,应用式(4)可得到第k +1 个时刻8 个对应的预测电流矢量Ij[k +1]。经过Ts周期后,电流矢量由Ij[k]转向Ij[k+1]。定义电流矢量轨迹:

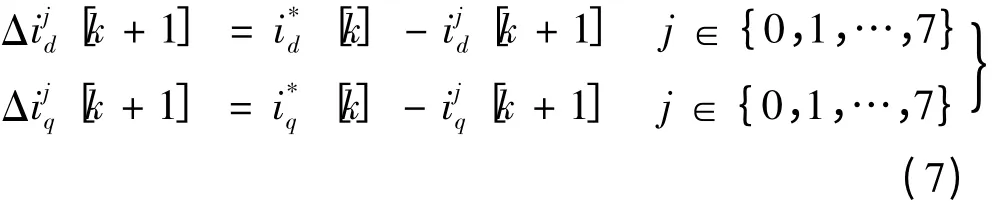
同时,还可以得到相应的电流误差矢量,定义为参考电流矢量与预测电流矢量的差值。即:

式中:I*[k]为第k个采样时刻的参考电流矢量,I*[k]=[k][k]]。
式(6)中电流误差矢量的直交轴分量分别:
记电流误差矢量的模为ρ[k+1],并将k +1 换为k,则:

记选择电压矢量的价值函数为J,且:

那么此时被选择的电压矢量就是满足式(9)的第j 个电压矢量Vj[k]。
2 控制器的软件设计
PMSM 的电流预测控0 制原理图如图1 所示。与通常的电机控制器相同的是:它同样需要检测电机转子的角度、速度和三相绕组的电流,并将三相绕组电流通过坐标变换至两相旋转坐标系下的直交轴电流,再通过预测控制选择一组最优的开关矢量来控制逆变器。
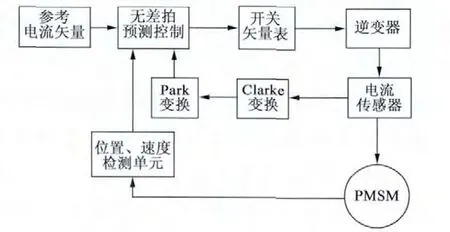
图1 基于电流无差拍预测控制的软件原理框图
控制系统的程序设计包括主程序和中断服务子程序。主程序主要进行硬件和变量初始化,给各个控制寄存器赋初值,对运算过程中使用的各种变量分配地址并设置相应的初值。主程序为一个无限的循环,它通过连续运行EPWM1 的零中断来起动循环输出PWM 脉宽调制信号以控制驱动电机。在程序中,首先完成驱动电机参数的设定、DSP 寄存器的初始化。而子程序的功能是实现某个具体功能的小程序,整个系统由多个功能单元组成,因此也有多个子程序。
控制器主流程图如图2 所示。首先定义声明软件模块,初始化系统的定时器,并使能定时器中断,然后给系统的基本参数赋值,对软件模块进行初始化,再校验电流采样单元的电流采样值,最后允许中断并等待中断程序的到来。
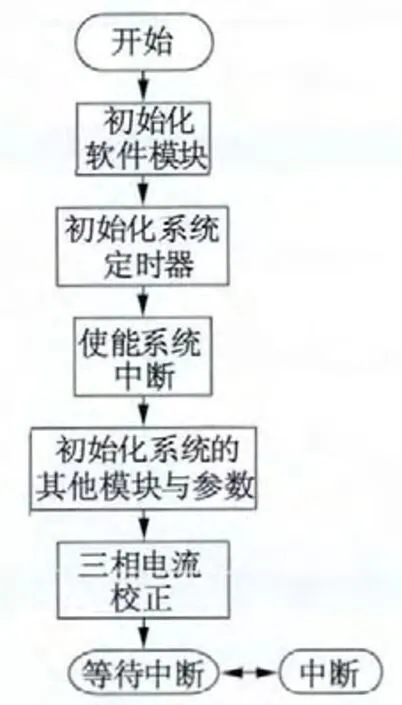
图2 控制器软件主流程图
由图3 可见,当EPWM1 的计零中断发生时,主程序允许并接受此中断,程序转向相应的中断服务子程序。在中断服务子程序中,系统首先做现场保护,接着检测、采样电机的三相绕组的电流值和直流母线电压的电压值,并通过Clarke 和Park 变换,将三相绕组电流转换为两相旋转坐标系下的直交轴电流,为后面的电流预测控制提供反馈电流。然后,通过DSP 的SPI 口读取旋转变压器解码芯片AD2S1205 中的角度和转速信号。至此,电机的直交轴电流、转子的角度和转速信号已经通过软件获得,而电机自身的一些参数已经提前获知,因此,可以通过电流预测控制算法得到下个控制周期所需要的功率开关管控制信号。
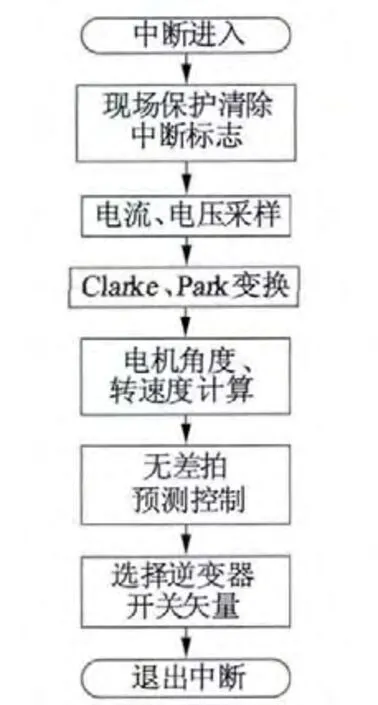
图3 中断服务程序流程图
3 测试平台与结果
3.1 控制器硬件平台设计
控制器由驱动板和控制板组成。驱动板包括了可以满足IGBT 实现可靠的最佳驱动所必需的电子元件,例如:极低的门极电阻以实现最小的开关损耗,门极箝位,有源箝位二极管(IGBT 瞬间关断时发生的瞬态电压),Vce短路电压监控。此外还包括用于关断电平设置的元件及用于设置反响时间和死区时间的元器件。
图4 为三相IGBT 功率开关模块的单相上下桥IGBT 管驱动电路原理框图。从控制板传送过来的PWM 信号需要通过隔离电路,以减少控制板与驱动板之间的电磁干扰。另外,由于控制板的PWM 信号电平与IGBT 管动作电平之间的差异,需要在两者之间加上信号电平转换。该电平转换电路的供电电源是经过DC -DC 变换的直流电源。各个IGBT的集电极均配置了有源箝位电路,用于箝制IGBT瞬间关断时所产生的反向感应电压。同时,还对IGBT 集电极的电位进行监测,如果电压过低将做出欠压保护,而当单相的上下桥IGBT 直通时,将进行短路保护,这两种保护信号均能触发故障信号,由SO 管脚输出。
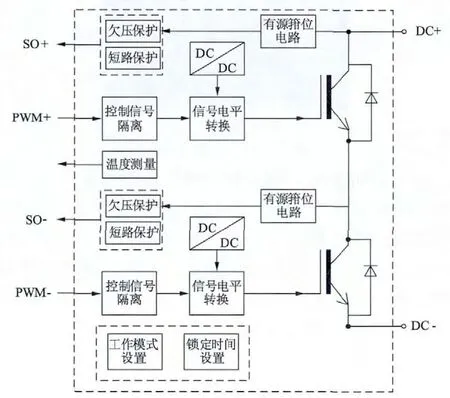
图4 单相上下桥IGBT 驱动电路原理框图
图5 为由六路IGBT 模块与驱动板组成的三相逆变模块实物图。
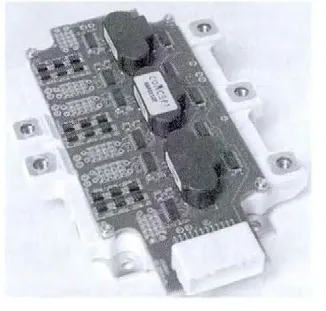
图5 驱动模块实物图
电源板与控制板实物图如图6 所示,它们之间通过排针和排座相连接。
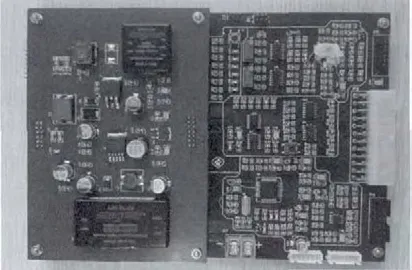
图6 电源板与控制板
3.2 实验系统及结果
自主研发的控制器用于控制被测电机的运行,被测电机主要参数如表1 所示。
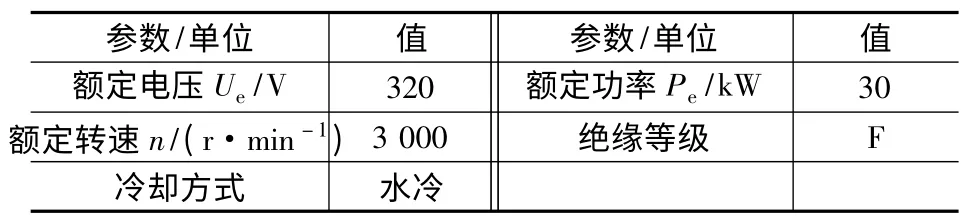
表1 被测电机主要参数
负载电机是一台75 kW 的感应电机,采用ABB的变频器控制其运行。测功平台实物图如图7 所示,扭矩传感器用于检测负责扭矩的输出。
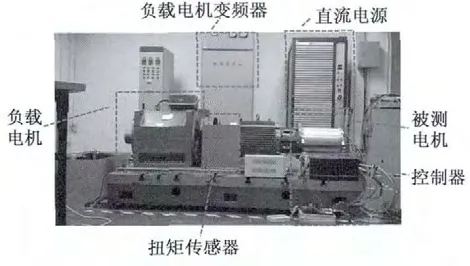
图7 测功平台实物图
自主研发的控制器的实物图如图8 所示。主要由控制器电源、控制单元和功率逆变器组成,图中的仿真器用于连接仿真软件Code composer studio 与控制器,实现两者之间的数据通信和控制器的仿真调试。控制器与被测电机统一采用一套水冷装置,通过水循环将热量带至散热片,再通过风扇向散热片吹风,使系统温度保持在正常工作范围内。
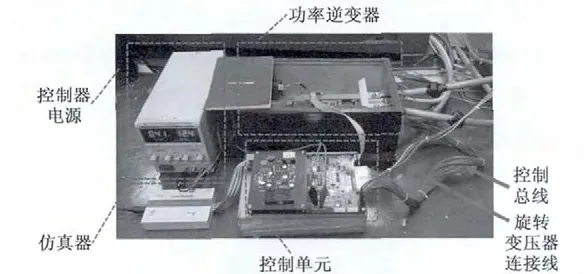
图8 控制器的实物图
在本实验中,被测电机运行于转矩模式,负载电机运行于转速模式。图9 为当电机转速为1 500 r/min、转矩为50 N·m 时通过CCS 软件的示波器截图得到的实验波形,横坐标单位均为s,纵坐标均采用标幺值表示。图9 中,Channel1:电机A 相绕组电流,额定电流200 A;Channel2:电机转子角度,标幺值1 表示360°;Channel3:电机转速,额定转速3 000 r/min;Channel4:电机交轴电流iq,额定电流200A。
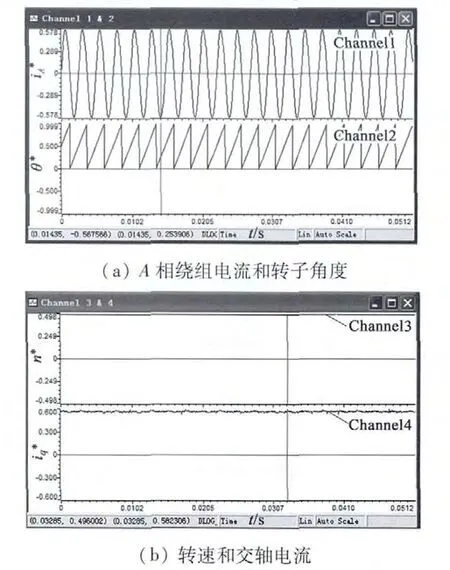
图9 n=1 500 r/min,T= 50 N·m 时的实验结果
从图9(a)中可以看出,电机A 相绕组的电流正弦度好;从图9(b)中Channel3 曲线可以看出电机转速平稳;从图9(b)中Channel4 曲线观察到力矩(交轴电流)输出也平稳。证明转矩输出效果良好。
4 结 语
本文阐述了电流预测控制方法的原理,设计了基于电流预测控制的控制器软件算法及硬件平台,通过实验验证了所设计系统的可行性和有效性。
[1] 贾顺平,彭宏勤,刘爽,等.交通运输与能源消耗相关研究综述[J].交通运输系统工程与信息,2009,9(3):6 -16.
[2] 施晓清,李笑诺,杨建新.低碳交通电动汽车碳减排潜力及其影响因素分析[J].环境科学,2013,34(1):385 -394.
[3] 许家群,徐衍亮,邢伟,等.电动汽车驱动用永磁同步电动机转子结构选择[J].微特电机,2004,32(3):12 -13.
[4] 王慧波,陶志军,窦汝振.一款电动汽车用的永磁同步电机控制系统的设计[J].微电机,2010,43(11):55 -57.
[5] 许家群,朱建光,邢伟,等.电动汽车用永磁同步电动机直接转矩控制系统[J].微特电机,2005,33(11):28 -29.
[6] 洪俊杰. 绕组分段永磁直线同步电机电流预测控制的研究[D].哈尔滨:哈尔滨工业大学,2010.
[7] 洪俊杰,李立毅.基于电流误差矢量的绕组分段永磁直线同步电机电流预测控制[J].中国电机工程学报,2011,31(30):77 -84.