新型高压输电线路绝缘子检测机器人研发方案
2015-03-11汪晓陈垚单军余祥勇丁勇刘志林
汪晓,陈垚,单军,余祥勇,丁勇,刘志林
(1.国网安徽省电力公司检修分公司,合肥市230061;2.北京国网富达科技发展有限责任公司,北京市100070)
新型高压输电线路绝缘子检测机器人研发方案
汪晓1,陈垚2,单军1,余祥勇1,丁勇1,刘志林1
(1.国网安徽省电力公司检修分公司,合肥市230061;2.北京国网富达科技发展有限责任公司,北京市100070)
提出了一种针对超、特高压交流输电线路绝缘子的检测机器人研发方案,所研制的机器人具有高效的行走和检测方式,其体积小巧、轻便易用、可检测绝缘子串零值。检修人员只需配合机器人检测程序操作,将机器人放置在需要检修的绝缘子上即可。机器人会自动逐片移动检测,每越过一片绝缘子,立即触发智能绝缘子检测单元,完成阻值检测。软件仿真与硬件测试表明,该绝缘子检测机器人能够实现智能化安全检测,对保证电力系统的安全稳定运行具有重要的社会效益和经济效益。
高压输电线路;绝缘子检测;检测机器人;自动控制系统
0 引 言
超、特高压输电线路上的绝缘子是用来固定导体,使其保持电气性能的重要部件。在电力系统运行中,其长期工作于由强电场、机械应力、污秽等共同构成的错综复杂的恶劣环境中,容易发生故障,对电力系统的安全运行造成严重威胁[1-3]。因此,有必要对绝缘子的绝缘性能进行定期检测。目前,绝缘子检测主要采用人工检测方式。由于人工的检测方式和技术难以适应当前电力生产对安全的要求,研发先进的智能检测工具对减短巡检周期、及时发现存在的缺陷、有效消除事故隐患,从而确保电力系统的安全稳定运行具有至关重要的意义[4-6]。
绝缘子串检测机器人的应用范围主要是停电或带电的架空输电线路的绝缘子[7-10]。用机器人进行巡检作业,不仅可以减少因人员疏忽漏检等带来的损失,提高电网的运行质量,而且可以减少供电系统的人员投入,降低人员成本,尤其在恶劣环境中人工检测工作十分艰辛,劳动强度大,费用多且危险性高,存在高空坠落、人员触电等隐患。
目前,绝缘子检测机器人的研究主要分为三大类别:轮式、履带式、手爪爬行式[11-17]。轮式机器人结构简单、成本较低,但路径、姿态稳定性不足,导致其应用范围受到限制,并且不易升级为具有作业能力的新一代巡检和维护机器人。履带式机器人适用于超高压输电线路耐张塔双联瓷制水平绝缘子串的带电检测,具有主动驱动功能,能够适应绝缘子距离变化,可沿串自动爬行。作业人员只需将机器人放置在被测试绝缘子上,启动检测程序,机器人将自动逐片移动,每越过一片绝缘子即触发智能绝缘子检测仪,实现该片绝缘子的阻值测试。但该类机器人只能检测水平放置的绝缘子串。手爪爬行式机器人采用手爪和多轴联动机构,通过控制手爪的开合和手爪位置的移动来驱动机器人在绝缘子串上行走,该类型机器人机构较为复杂,运动不便。此外还有以行星轮为驱动机构的绝缘子检测机器人,但该类机器人可靠性较差、不能适应多种型号的绝缘子串。除此之外,上述机器人一般只能适应特定绝缘子类型,重量较大,并且都缺乏可靠的防护措施和高可靠性的环境适应能力。由于绝缘子串检测机器人在工作过程中,会受到大风、沙尘、潮气等环境因素的影响,因此必须提高机器人的防护等级,以适应各种影响机器人性能的常见气象环境。
本文提出一种新型的绝缘子检测机器人的研发方案。该方案包括机器人的本体机构设计方案,机器人本体控制系统搭建方案,绝缘子检测模块设计方案。有别于现有的绝缘子检测机器人,本文提出的机器人具有高效的行走和检测方式,结构小巧,轻便易用,可用于检测多种类型的绝缘子,具备高效智能的检测功能。
1 绝缘子检测机器人总体设计
绝缘子串机器人主要包括机器人本体、绝缘子阻值检测模块、地面操控端三大部分。机器人本体负责运载绝缘子阻值检测模块,在绝缘子串上逐片行走,并触发检测模块工作。同时,检测模块记录每次测量结果至储存卡中。地面操控端负责实时监控绝缘子检测机器人工作状态,在启动、停止或一些特殊情况需要人为操作时对机器人发出遥操作指令,控制机器人动作。图1为机器人总体设计示意图。
机器人本体机构由绝缘子攀爬机构、保护导向杆、控制箱体和绝缘子检测模块构成。机构接触绝缘子部分均采用PVC塑料材质,以防损伤绝缘子。攀爬机构采用轮式或悬臂式结构,在绝缘子串上可以逐个越过绝缘子片。保护导向杆采用轻型材质,通过弹性机构连接,依附于绝缘子串上,保证攀爬机构对绝缘子串有足够的压力以避免打滑。同时,机器人通过保护导向杆环抱绝缘子串,使机器人能够在绝缘子串上运动而不脱落,保证了机器人的安全性。机器人本体机械结构如图2所示。绝缘子状态检测模块主要部件包含本体、测量探针2个部分。通过线路绝缘子零值检测,即测量绝缘子的绝缘电阻数值,判断其绝缘电阻值是否能达到运行要求,从而判断绝缘子的绝缘性能。仪器相当于一个“电阻箱”,瞬时给绝缘子一个激励,通过电路的测量及转换计算,得出绝缘电阻值,通过微控制器与给定限值进行比较判断,并给出数字显示及相关报警灯光显示(如图3)。测量探针能够方便地卡在绝缘子的球头和碗头之间。图4为绝缘子测量原理图,图5为机器人在绝缘子串上运动的仿真图。

图1 绝缘子检测机器人总体设计Fig.1 Overall design of insulator detecting robot
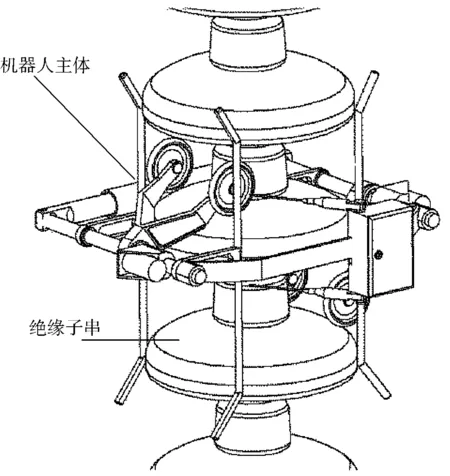
图2 绝缘子检测机器人本体机械结构Fig.2 Mechanical structure of main body of insulator detecting robot
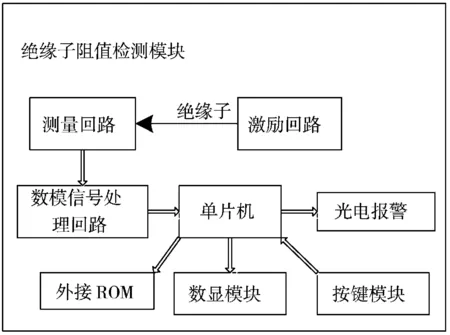
图3 绝缘子阻值检测模块原理Fig.3 Detection module principle for insulator resistance

图4 绝缘子检测方法Fig.4 Insulator detecting method
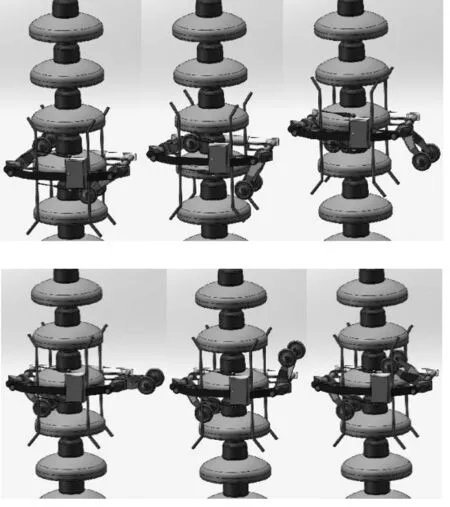
图5 机器人在绝缘子串上运动仿真Fig.5 Motion simulation of robot on insulator string
2 绝缘子检测机器人研发方案
2.1 机器人本体机构设计方案
机器人本体结构设计需要满足稳定性、便携性和易用性,其主要组成部分有攀爬机构、保护导向杆、控制箱体、绝缘子检测模块。
2.1.1 运动机构
机器人攀爬机构初步设计采用双齿轮结构,在绝缘子串上行走时齿状结构有效利用了绝缘子的片状结构,能够高效快速地在绝缘子串上运动,避免了打滑情况的发生[13]。结构采用PVC塑料材质,具有质量轻,不损伤绝缘子的优点。运动过程中,两轮先后作用于相邻的两个绝缘子上,此种方式可有效减短机器人的长度,避免过多的绝缘子检测失效,提高了安全性。机器人在工作时将逐个跨越绝缘子,机体安装有红外反射式传感器,用于定位绝缘子位置,在每次到达位置时触发探针进行测量。
2.1.2 防护机构
高空作业对机器人的安全性,防坠落性能有较高的要求。由于绝缘子串为片状叠加结构,所以机器人在绝缘子串上运动时难免会出现颠簸。保护导向杆与机身采用弹性连接,在机器人运动过程中提供持续稳定的抱紧力,使机器人行走机构在颠簸状态下对绝缘子随时都有足够的压力,保证机器人在绝缘子串上可靠行走。同时,连接弹性机构设置有保护极限位置,保证机器人在极限位置时环抱绝缘子串角度大于230°,保证机器人不会在外界干扰(如大风,震动等)情况下脱开绝缘子串,发生意外坠落。
2.1.3 控制箱体和检测模块结构
控制箱体和检测模块考虑轻量化和小型化设计,与机身稳定连接。控制箱体内安装有主控制板、电机驱动器、数传模块、电源模块以及电池。采用小型航空插头与绝缘子检测模块以及电机、传感器等外围器件连接。绝缘子检测模块与探针执行运动机构采用一体化设计,保证探针稳定可靠地接触绝缘子上下触点。
2.1.4 多种绝缘子串适应能力
绝缘子串分为悬垂串(I串)、V串和水平串,串分为单串、双串、四串。按照绝缘子串的型号不同,其伞裙有所差异。故机器人在设计过程中应该尽可能多地满足不同类型绝缘子串的要求。由于机器人本体高度横跨2至3个绝缘子,故在设计过程中需要保证探针能够检测到绝缘子串首个绝缘子和最后一个绝缘子。
2.1.5 机器人本体辅助放置结构
机器人在执行检测任务前,需要通过人工方式安放至绝缘子串上。为了能够高效可靠地完成这一过程,研究过程中拟设计一个轻便的机器人辅助安放机构,能够便于操作人员携带上杆塔,将机器人安放至绝缘子串初始位置。
2.1.6 过电压与过电流保护措施
机器人外壳和走线采用全屏蔽设计,电气部分通过金属层包裹,保证机器人在电场环境下不受干扰。在带电作业中,机器人的外侧安装有4个小型均压环,有效降低了电晕现象,从而确保机器人在检测绝缘子过程中本体机构的安全。
2.2 机器人本体控制系统搭建方案
机器人本体有较为严格的尺寸和质量限制,为减小机器人控制箱体积和质量,控制板为全自主设计,这样能够更加合理分配电路板上的引脚资源,减小控制板大小,同时更易于在电磁兼容等特性上进行把关。电路板为4层板设计,由于机器人上有较多的感测器、驱动器等设备,所有的端口在满足电气特性的前提下选用最小接插,并合理设计安排走线。系统电源采用24 V锂电池供电,通过稳压模块满足系统内部不同设备供电需要。以ARM STM32系列芯片为核心,主控制器以总线或独立控制方式连接电机驱动器,驱动机器人执行机构电机。控制系统配有小型数传电台,用来和地面操控端通信,满足数据交换传输和遥控操作指令发送需要。机器人还可以选配倾角传感器、GPS、超声波等传感器以实现高性能升级需要。
2.2.1 机器人主控制器
主控器件选用STM32F103VE。该系列芯片结合了高性能、实时、低功耗、低电压等特性,内部集成整合了非常丰富的资源,涵盖了机器人控制所需的所有外部设备和结构。
2.2.2 电机及驱动器
电机和电机驱动器是机器人的关键部件,直接关系到机器人的性能和操作安全。方案采用伺服系统驱动Pluto Digital Servo Drive,电机采用Maxon电机。系统24 V供电,额定功率为90 W,电机前端配备GP32C型行星齿轮减速器。
2.2.3 电源模块
采用锂聚合物电池。由于动平衡、电池组安装空间、希望工作时间等因素,机器人锂电池组需要根据机器人整体设计和空间单独制作。电池可更换,单块电池可连续测量600片绝缘子以上。
2.2.4 红外传感器
红外传感器用于机器人运动关节的位置检测以及障碍物的碰撞检测。方案中选用的超微型传感器型号为Q12AB6FF15。
2.2.5 操控手柄
地面控制端部分主要由上位机、遥控操作手柄、无线电台模块组成,操作人员可通过人机交互界面实时控制机器人。
2.2.6 通信模块
数传电台采用微型工业级跳频数传电台SageDATA900i。SageDATA900i的灵敏度高达-116 dBm,具有出色的远距离通讯能力。电台的端口数据速率高达230.4 kbps,性能卓越。支持中继、漫游、点对多点等多种组网方式。可以绕过建筑群通讯,可在各种恶劣环境中提供健壮的无线链路,稳定可靠地长期运行。此外,该数传电台体积小,质量轻,易与各种设备集成。
2.3 绝缘子检测模块设计方案
2.3.1 高压电源发生器(5 000 V)
绝缘子串检测模块开关电源的供电电压为12 V,采用推挽电路,其开关管的栅极在激励方波信号控制下交替导通与截止,12 V直流电压变换成高频方波后,交替加在升压变压器的两个原边,相当于一个半峰值12 V的交变方波加在变压器的原边上,之后在次边按匝数比变换为高压方波。为了得到稳定的高压,系统设计了带有过流保护的稳压电路。先将输出电压采样反馈到“运放”的正输入端,再与负输入端的基准电压比较后,来控制后级电路的状态,从而达到系统自动调节电压的目的。该高压电源发生器,结构简单、易于调节,稳压电路采用了负反馈,具有自动调节电压的功能,同时带有过电流保护功能,因此可作为绝缘电阻测试仪的高压电源。
2.3.2 检测模块控制系统设计
检测系统主要由微控制器、存储系统组成,完成对测量的绝缘子绝缘电阻的采集、处理、显示和存储。检测结果可通过USB接口导入计算机。检测模块系统如图6所示。

图6 绝缘子检测模块系统框
Fig.6 Block diagram for insulator detecting unit
2.3.3 存储系统设计
存储系统能够实时记录并存储每一片绝缘子的检测时间和结果,并能自动锁定零值绝缘子。绝缘子零值测量前可人工设定线路杆塔号、绝缘子相位等信息,并按设定信息逐相、逐片测量。
2.3.4 防护设计
由于高值电阻测量对象的电阻值同其绝缘电阻具有相近的量级,因此高阻测量电路泄漏的防护成为高阻测量的关键问题之一。防护要点如下。
(1)绝缘:是抑制和减少泄漏的最直接和有效的方法,电路各部分间的绝缘主要取决于仪器的结构和采用的材料,环境是影响绝缘的外部因素。
(2)隔离与汇流:泄漏是空间电场作用的结果,是电路各部分间不希望存在的“没有”电路的电流通路,泄漏是一种宏观的分布电量。由于这些特性,给泄漏的防护带来一系列困难。用金属壳体制成的屏蔽包围被防护电路,是改变被防护电路泄漏状况的最有效手段,其作用是对内切断被防护电路同其他电路间的“一切”泄漏通路,“一切”的含义在直流测量电路中的含义是除空气和电路本身外,被防护部分只能同屏蔽相接。亦即被防护电路仅泄漏于屏蔽。因此,屏蔽是隔离与汇集泄漏使其变为集中电量的工具,是对外泄漏的集中和出发点。屏蔽的第二作用是避免空间电磁场对测量的干扰。
(3)定位与引流:在屏蔽基础上的防护是对屏蔽进行的,通常是将屏蔽接向电路的某一点。给屏蔽以电位来确定屏蔽对电路各部分的电位关系。所接的电位点取决于防护的目的。通常有与被屏蔽电路保持固定电位以固定泄漏;与对称的被屏蔽电路中点等电位以使总泄漏等于0;与电路某点等电位以防止对某点的泄漏;对某一部分电路或被屏蔽电路保持低电位以减小对其泄漏;保持对某点的高电位以使泄漏集中于该点等。给屏蔽以电位时,必须兼顾屏蔽对内及对外的电位关系给泄漏以通路。该点即被屏蔽电路集中于屏蔽的泄漏的输出点,所接的点同样取决于防护的目的:使泄漏不流经测量电路;引导泄漏于低阻电路或辅助电路;分配泄漏使其作用抵消。浮空的屏蔽通常是不可取的。
3 实验验证
3.1 绝缘子测试平台搭建
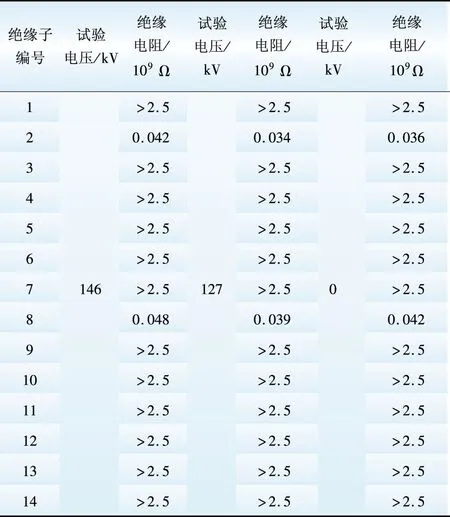
按照220 kV输电线路常规用绝缘子片数,将14片XWP-160双伞型瓷绝缘子安装在模拟横担的下方,模拟导线与横担成90°角。模拟导线上施加高压,模拟横担接地。14片绝缘子的编号自导线侧开始排序,靠近导线侧为1号,靠近横担侧为14号。为验证绝缘子机器人能否准确检测出运行中绝缘子串的零值绝缘子,两片在陡波冲击试验中击穿的该型绝缘子被安装在2号和8号位置。
3.2 绝缘子串的检测结果
由于该机器人在检测绝缘子时,显示的是绝缘子的绝缘电阻,并设定阻值上限为2.5×109Ω。因此,从表1可以看出,无论对绝缘子串是否施加电压,使用该绝缘子检测机器人测量出的绝缘电阻都能基本反映绝缘子的状态。通过设置对照组,有效地判断绝缘子的好坏。由表1可见,已经击穿的绝缘子(2号和8号)的绝缘电阻阻值相对很低,仅有几十MΩ。此外,为了验证该绝缘子检测机器人能否有效检测出绝缘子,3号与7号绝缘子上分别并联了2×108Ω和3×108Ω的电阻。在不加电压的情况下,使用检测装置测出的绝缘电阻分别为1.84×108Ω和3.16×108Ω。这表明,检测机器人也能够有效地检测出低值绝缘子。
表1 14片绝缘子的检测结果
Table 1 Detecting results for 14 insulators
3.3 地面操控端软件设计
为了更加安全、高效、便捷地控制绝缘子检测机器人,工程师开发了一套地面操控端软件平台。该软件功能包括控制机器人主体上下左右运动,暂停运动,机械主体复位,测试绝缘子状态,获取并显示测量数据,远程设置摇杆电机速度与舵机位置,显示左右机械臂的位置信息、传感器状态等,如图7所示。机器人主体实物照片如图8所示,机器人运动实验录像截图如图9所示,带电实验如图10所示。机器人尺寸(长×宽×高)为0.7 m×0.7 m×0.45 m;机器人质量为9.3 kg;机器人行走并检测1片绝缘子平均用时为7 s;机器人连续行走并检测6片绝缘子用时为33 s。
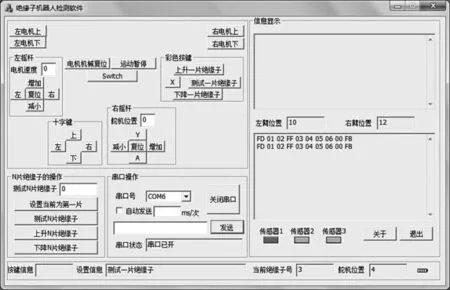
图7 地面操控端软件Fig.7 Software for ground terminal operation

图8 绝缘子检测机器人实物图Fig.8 Photos of insulator detecting robot

图9 检测6片绝缘子的实验录像截图Fig.9 Experimental video snapshots of 6 detected insulators
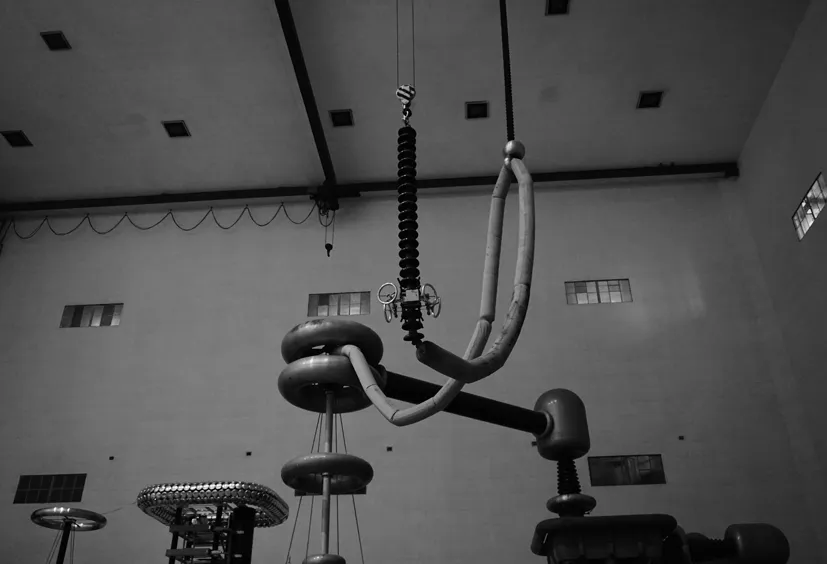
图10 机器人在线高压带电实验Fig.10 Robot experiment on EHV transmission line
4 结 论
本文提出了一种实用新颖的超、特高压输电线路绝缘子检测机器人的研发方案。首先,给出了检测机器人的总体设计方案。并将整体方案划分为3个具体实施方案:检测机器人的本体机构设计方案,机器人本体控制系统搭建方案,绝缘子检测模块设计方案。实验验证表明,采用向被测绝缘子上施加脉冲电压的方法,可以测出被测绝缘子的绝缘电阻值,实现高压悬式绝缘子绝缘电阻的带电和不带电定量检测。结合目前该研究领域的功能需求,所研制的绝缘子检测机器人可以方便携带至塔上,具有高效的行走和检测方式,进而减少操作人员在高空作业的时间,确保人身安全。该方案可用于检测多种不同类型的输电线路绝缘子,具备可拓展性,可以面向用户定制开发,对确保电力系统的安全稳定运行具有重要意义。
[1]Q/GDW515—2010,交流架空输电线路用绝缘子使用导则第一部分:瓷、玻璃绝缘子[S]. Q/GDW515-2010,Insulators for AC Overhead Transmission Lines Using Guide Part 1:Porcelain,Glass Insulators[S].
[2]蒋作谦,徐守时,殷国祥.高压输电线路上绝缘子的电晕脉冲电流采集系统[J].高电压技术,1997,23(2):56-58. JianZuoqian,XuShoushi,YinGuoxiang.A data acquisition system of corona pulse current of insulators in EHV transmission lines[J].High Voltage Engineering,1997,23(2):56-58.
[3]焦尚彬.交流电压下染污绝缘子表面污秽智能检测方法研究[D]西安:西安理工大学,2006. JiaoShangbin.Research on Intelligent detection method for surface contamination of the contaminated insulator under the AC voltage[D].Xi’an:Xi’an University of Technology,2006.
[4]严璋.电气绝缘在线检测技术[M].北京:水利水电出版社,1995.
[5]姚境,汪沨,胡凯,等.传感器在高压输电线路绝缘子检测中的应用[J].传感器与微系统,2010,29(10):1-3.
Yao Jing,Wang Feng,Hu Kai,et al.Application of sensor in high voltage transmission line insulators detection[J].Transducer and Microsystem Technologies,2010,29(10):1-3.
[6]上海市电力公司.10 kV架空配电线路带电作业指导书[M].北京:中国电力出版社,2007.
[7]赫哓,苏广明,王晨溪,等.带电检测绝缘子.机器人也能干[N].国家电网报,2011.
[8]方斌,莫锦秋,阳恩会等.HLDR-I 220 kV支柱瓷绝缘子带电检测机器人[J].机械科学与技术,2008,25(3):16-18. Fang Bin,Mo Jinqiu,Yang Enhui,et al.Robot HLDR-I applied to electrified checking-up the 220 kV brace porcelain insulator[J].Journal of Machine Design,2008,25(3):16-18.
[9]胡春江,刘学仁,赵德利,等.一种绝缘子检测机器人的应用研究[J].信息技术与信息化,2014,(3):126-128. Hu Chunjiang,Liu Xueren,Zhao Deli,et al.The application research of insulator detecting robot[J].Information Technology and Informatization,2014,(3):126-128.
[10]李健,鲁守银,王振利,等.220 kV变电站带电作业机器人的研制[J].制造业自动化,2013,(17):76-79. Li Jian,Lu Shouyin,Wang Zhenli,et al.Development of 220 kV transformer substation hot-line work robot[J].Manufacturing Automation,2013,(17):76-79.
[11]朱虎,李卫国,林冶.绝缘子检测方法的现状与发展[J].电瓷避雷器,2006(6):13-17. Zhu Hu,LiWeiguo,Lin Ye.Present and future development of detection methods for composite insulator[J].Insulators and Surge Arresters,2010(6):13-17.
[12]宗光华等.机器人的创意设计与实现[M].北京:北京航空航天大学出版社.2004.
[13]李明时.国内首个绝缘子检测机器人在东北电网投入作业[N].东北电力报,2010.
[14]李中生,曹涛,王军,等.盘式瓷绝缘子智能检测机器人系统的设计与研究[J].科学技术与工程,2013,13(15):267-271. Li Zhongsheng,Cao Tao,Wang Jun,et al.Design and Research of the Disc Porcelain Insulators Intelligent Detection Robot System[J].Science Technology and Engineering,2013,13(15):267-271.
[15]张宏志,曹淑伟,董云鹏,等.耐张绝缘子检测机器人的研究[J].华北电力技术,2013,34(5):4-6. ZhangHongzhi,CaoShuwei,DongYunpeng,et al.The Research of Tension Insulator Detecting Robot[J].Northeast Electric Power Technology,2013,34(5):4-6.
[16]何守印,张立燕.绝缘子检测机器人步法设计及控制系统实现[Z].中国仪器仪表与测控技术报告大会,湖南,2008.
[17]吴宗泽.机械设计实用手册[M].北京:化学工业出版社,2008.
汪晓 (1972),男,工程硕士,高级工程师,主要从事输电运检管理方面的研究工作;
陈垚(1987),男,硕士,电气工程师,主要从事电网监测设备和电网用机器人方面的研究工作;
单军(1960),男,大专,高级工程师,主要从事输电线路专业技术方面的研究工作;
余祥勇(1966),男,高中,带电检修高级技师,主要从事输电线路检修方面工作;
丁勇 (1974),男,大专,带电检修高级技师,主要从事输电带电作业方面的工作;
刘志林 (1986),男,本科,电气工程师,主要从事输电运检带电检修方面的工作。
(编辑:张小飞 )
A Novel Design of Insulator Detecting Robot for HV Transmission Lines
WANG Xiao1, CHEN Yao2, SHAN Jun1, YU Xiangyong1, DING Yong1, LIU Zhilin1
(1. State Grid Anhui Electric Power Maintenance Branch, Hefei 230061, China;2. Beijing Guowang Fuda Science & Technology Development Co., Ltd., Beijing 100070, China)
This paper presented a novel design of insulator detecting robot for EHV/UHV transmission line. With the features of compact in size, easy operation and applicability for the zero value detecting of insulator string, the proposed robot had efficient walking and detection methods. Maintenance personnel only needed to cooperate with the detection procedures of the robot, and placed the robot on the insulator that needed to be overhauled. Then the robot would automatically detect one by one, and immediately triggered intelligent insulator detection unit, calculated the resistance value of each insulator. Software simulation and hardware experiment show that this insulator detecting robot can achieve intelligent security detection, which has important social and economic benefits for ensuring the safe and stable operation of power system.
high voltage transmission line; insulator detection; detecting robot; automatic control system
TM 755
A
1000-7229(2015)06-0077-07
10.3969/j.issn.1000-7229.2015.06.013
2015-02-20
2015-04-15
