高动态导航接收机直扩信号捕获方法研究*
2015-03-09王鹏,陈国瑛
高动态导航接收机直扩信号捕获方法研究*
王鹏1,陈国瑛2
(1.北京电子工程总体研究所,北京100854; 2. 中国航天科工集团 第二研究院,北京100854)
摘要:针对高动态导航接收机中,多普勒频移带来的伪码速率和伪码相位变化造成积累损失、捕获精度下降的问题,提出了一种改进的FFT快速捕获算法。该算法根据搜索频点实时更新本地再生伪码,并基于定时器和捕获的多普勒频率对捕获伪码相位进行实时校正。理论分析和计算机仿真结果表明,提出的改进算法在几乎不增加实现资源的前提下,提高了高动态导航接收机直扩信号的捕获性能。
关键词:导航直扩信号;高动态;捕获性能
0引言
由于飞行载体的高速运动,空间飞行器上导航接收机接收到的导航信号具有较大的多普勒偏移,增加了信号捕获过程中多普勒频率的搜索范围,增长捕获时间;同时,较大的多普勒频移还会导致与之耦合的伪码速率和伪码相位发生较大变化[1],影响捕获信噪比和捕获精度的性能指标,增大信号捕获的难度。
目前,提高高动态导航直扩信号捕获性能的方法主要分为2类:第1类为采用辅助信息的捕获方法,例如INS(惯性导航系统)/GPS组合导航系统[2],GNSS/SINS(捷联惯性导航系统)组合导航系统[3]等。第2类为改进接收机内部的信号处理算法的捕获方法,文献[4]和文献[5]分别采用高折叠倍数匹配滤波器、FFT相结合算法和基于小波变换FFT优化捕获算法,理论上提高了捕获速度,有效缩短了捕获时间。但由于没有考虑到大多普勒偏移带来的伪码速率变化及伪码相位误差的影响,在实际高动态环境中应用时,捕获性能将会明显下降。
本文在基于FFT的捕获方法基础上,分析了大多普勒频移带来的伪码速率及伪码相位误差的影响,并对其校正方法进行了分析、仿真与实现,不需要大量增加实现资源,即可提高高动态导航直扩信号的捕获性能。
1基于FFT的常规捕获算法及其存在的问题
1.1基于FFT的捕获算法[6]
捕获,即载波和伪码的粗同步,是通过本地信号对接收信号的伪码相位和多普勒频率进行初步估计的过程。捕获过程实质上是基于频域和时域的二维搜索过程。一个伪码步进单元和一个多普勒步进单元构成一个搜索单元,如图1所示。
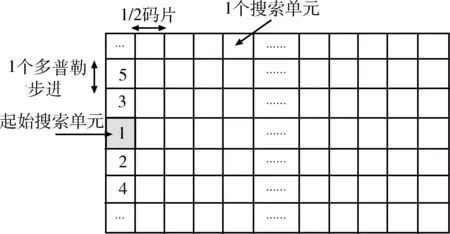
图1 捕获过程二维搜索图Fig.1 Two dimensions searching diagram of acquisition
1.1.1频域搜索
频域搜索采用全频点多普勒串行搜索策略,如图2所示。对所有多普勒搜索频点进行搜索,并存储所有过门限的检测信噪比及其对应的多普勒频率和伪码相位,遍历搜索频点后,对存储的信噪比进行选大,最大信噪比对应的多普勒频率和伪码相位即捕获结果[7]。
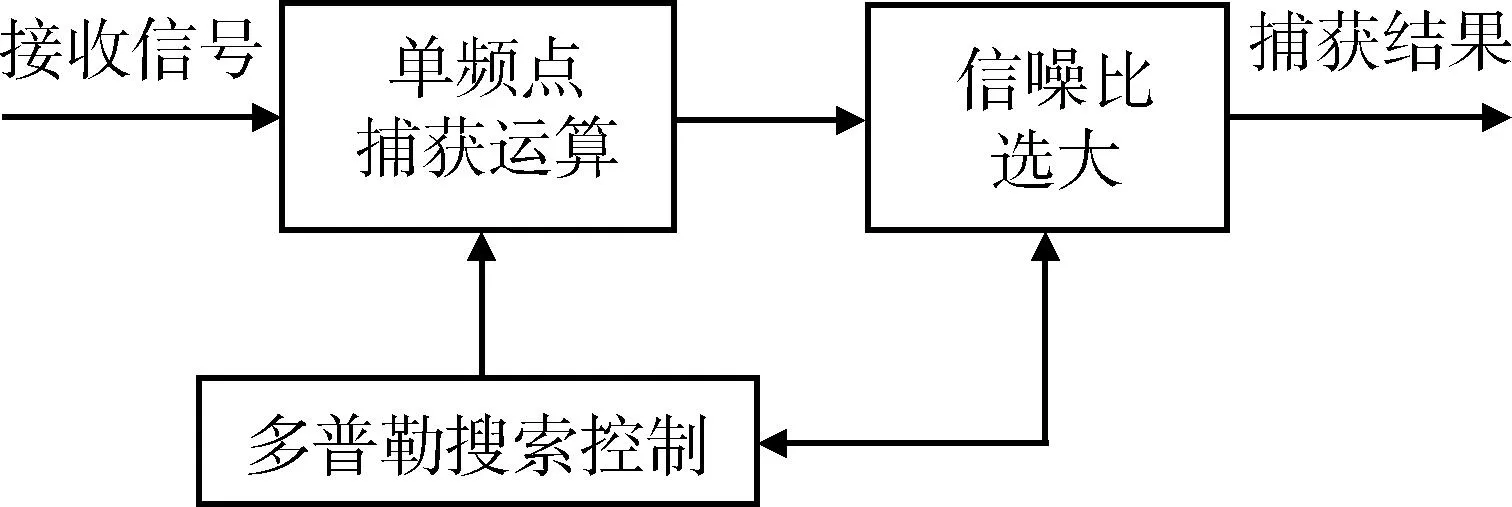
图2 全频点多普勒串行搜索策略Fig.2 Full-range Doppler-serial searching strategy
1.1.2时域搜索
对于某一频域搜索单元,应答机接收到的中频信号可以表示为
s(k)=A·PNI(tk-ts)cos(2πfItk+2πfdtk+φ),
(1)
式中:tk=k·Ts(Ts=1/fs为采样时间间隔);A为信号幅度;PNI(t)为伪码序列;fI为中频频率;fd为多普勒频率;ts为伪码序列的起始时刻(伪码相位);φ为载波初始相位。

(2)
本地再生伪码可以表示为

(3)
接收信号经正交下变频,积分清除后的结果可以表示为

(4)
式(4)可以看作接收信号经正交下变频后与本地伪码圆周相关的结果,依据圆周相关定理,时域的圆周相关等效于频域的共轭相乘,即:

Rxy(K)=X(K)Y*(K),
(5)
式中:X(K),Y(K)分别为x(k),y(k)的傅里叶变换。
基于FFT的快速捕获算法单频点运算的结构框图如图3所示。对接收信号的正交下变频结果及本地伪码进行FFT运算,并对其共轭相乘结果进行IFFT运算。通过一次FFT及IFFT的运算,可以完成单个多普勒搜索单元上所有码相位搜索单元的圆周相关结果计算,实现了多普勒串行搜索,伪码并行搜索的搜索方式。FFT运算具有运算速度快,节约存储空间的特点,基于FFT的快速捕获方法采用FFT和IFFT来完成圆周相关结果的成组计算,成倍减少了捕获时间。
1.2高动态情况下应用存在的问题
常规FFT捕获算法中,本地再生伪码由于忽略了多普勒频率偏移带来的接收信号伪码速率变化,高动态下本地再生伪码与接收信号伪码速率不匹配将造成积累损失;同时,高动态下全频点搜索策略虽然减小了多普勒频率偏差,但同时也增加了搜索时间,造成较大的捕获码相位偏差[8]。
1.2.1伪码速率变化造成积累损失
设η为多普勒频率偏移所导致的码速率变化修正系数,那么高动态下应答机接收到的中频信号可以表示为
s′(k)=A·PNI[(1+η)(tk-ts)]·
cos[2πfItk+2πfdtk+φ],
(6)
式中:η=fd/fc,fc为应答机接收载波频率。
高动态环境下,伪码速率将因较大多普勒频率偏移的存在而产生明显改变。若沿用常规捕获算法中本地伪码的产生方式产生伪码速率固定不变的再生伪码,接收信号伪码与再生伪码的速率差异会造成相关结果的积累损失,进而影响到捕获性能。
将式(6)带入式(4),高动态下单频点检测输出结果可以表示为

(7)
依据伪码的自相关特性,码速率变化修正系数η将造成单频点检测输出结果的积累损失[6],随着多普勒频率偏移的增大,伪码相关结果积累损失明显,需要对其进行补偿。
1.2.2伪码相位变化造成捕获精度下降
多普勒频率单元的顺序搜索将导致捕获到伪码相位的时刻与捕获伪码相位结果输出时刻并非同一时刻。在常规捕获算法中,由于忽略了多普勒频率偏移对伪码速率的影响,认为间隔为伪码周期整数倍的时刻伪码相位保持一致。故本地产生周期与伪码周期相同的同步时钟用来标记捕获算法的起始采样时刻及捕获结果输出时刻,从而确保捕获伪码相位输出时刻与捕获到的伪码相位相一致。
在高动态环境下,伪码速率的改变将引起伪码周期内伪码相位的偏移。改进的多普勒搜索策略需遍历所有搜索频点后,对过门限的检测信噪比进行选大,输出相应的捕获结果。因此,最大检测信噪比对应的伪码相位的起始采样时刻与捕获结果输出时刻存在时间差,高动态环境下,这将导致较大的伪码相位偏移[9]。
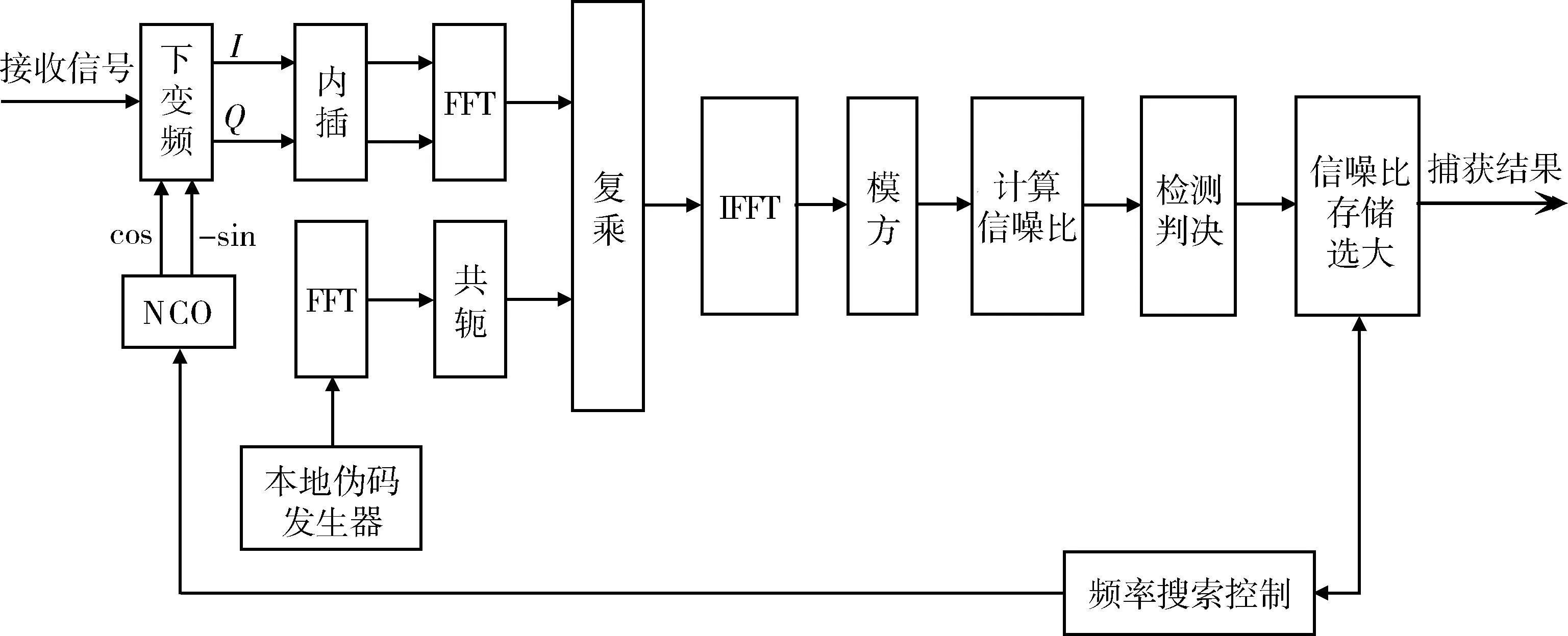
图3 基于FFT的单频点运算结构框图Fig.3 Flow chart of FFT-based acquisition in single frequency point
由式(6)可知,码片长度为N的一个伪码周期内的伪码偏移量为
τ0=ηN.
(8)
假设多普勒频率搜索单元数为M,接收信号的多普勒频率偏移位于第m个搜索单元,第i个搜索单元捕获到伪码相位时对应的起始采样时刻为Ti个伪码周期,那么捕获伪码相位输出时刻的伪码相位偏移为
Δτ=ΔT·τ0=(TM-Tm)ηN.
(9)
当多普勒频率搜索范围较大或者多普勒频率偏移较大时,将产生不可忽略的伪码相位偏移,需要对其进行伪码补偿[10]。
2改进的FFT快速捕获算法
基于FFT的常规快速捕获算法虽然减少了捕获时间,但高动态环境下,由上述因素引起的伪码速率偏移和伪码相位误差并未得到校正,本文在基于FFT的快速捕获算法基础上提出了伪码速率偏移和伪码相位的校正方法。
加入伪码相位校正后的FFT快速捕获算法结构框图如图4所示。
2.1依据搜索频点更新本地再生伪码
针对本地再生伪码与接收信号伪码速率不匹配造成积累损失,本文采用了依据搜索频点更新本地再生伪码的方法。通过该方法,可减小接收信号伪码与本地再生伪码之间的伪码速率之差。为了减小积累损失,在每个多普勒频率搜索单元依据搜索频点更新本地再生伪码的伪码速率,使得捕获信号频点的本地再生伪码与接收信号伪码的伪码速率之差不大于1/2频率搜索步进。
依据搜索频点更新本地再生伪码的结构框图如图5所示,本地伪码发生器接收到来自多普勒搜索控制的当前频率搜索单元对应的多普勒频率值,依据搜索频点更新伪码频率字,经相位累加器后查找对应码表,输出当前频率搜索单元对应的本地再生伪码。伪码频率字的更新依式(10)进行:
fword_new=(1+η)fword_initial,
(10)
式中:η=fd/fc为多普勒频率偏移所导致的码速率变化修正系数,fc为应答机接收载波频率,fd为当前频率搜索单元对应的多普勒频率;fword_new为更新后伪码频率字;fword_initial为无多普勒频率偏移时的伪码频率字。
依据搜索频点更新本地再生伪码后,本地再生伪码可以表示为

(11)
单频点检测的输出结果可以表示为

图4 伪码相位校正后的FFT快速捕获算法结构框图Fig.4 Flow chart of proposed acquisition algorithm
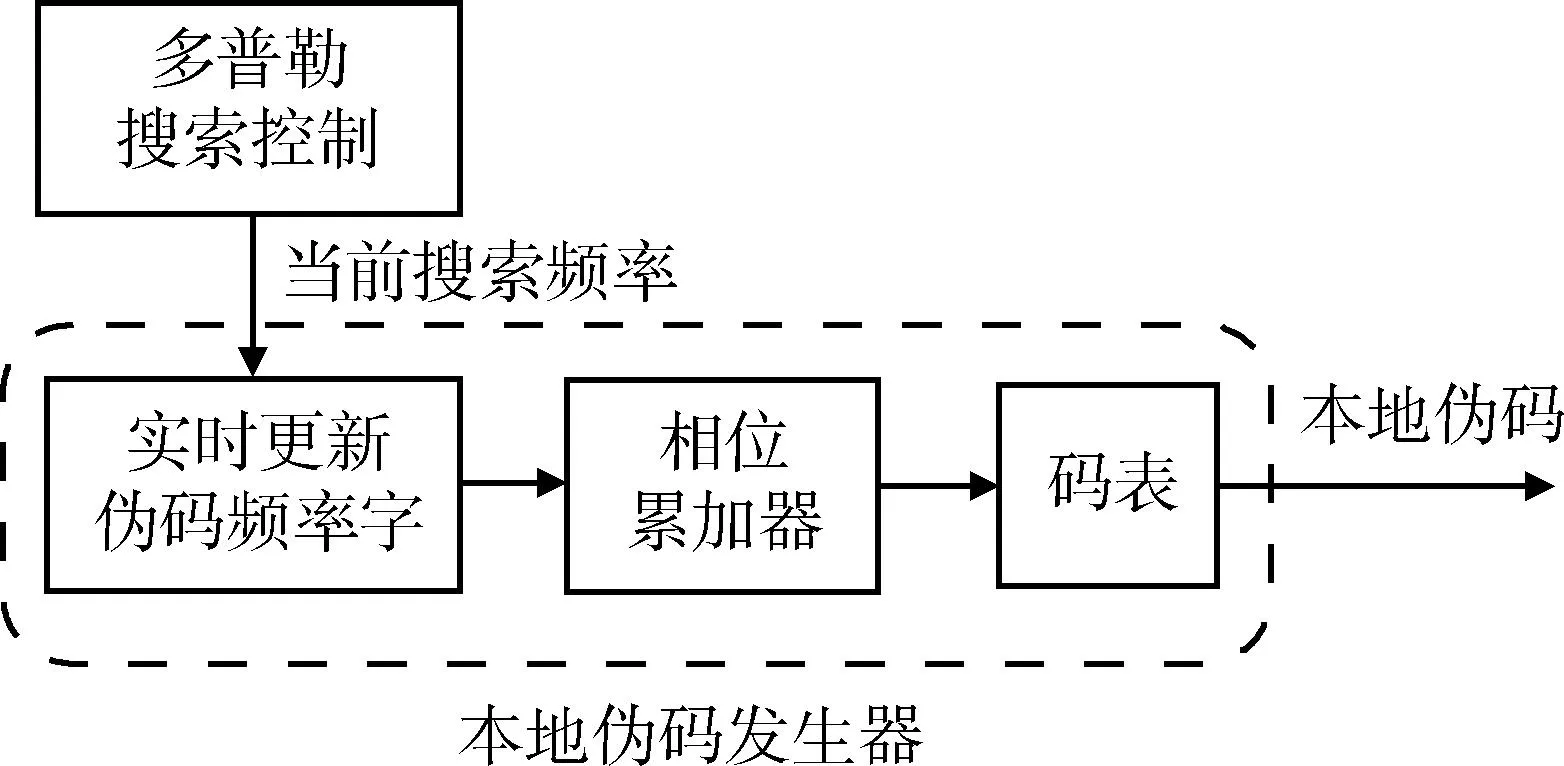
图5 实时更新本地再生伪码结构框图Fig.5 Flow chart of updating local PN code in real time


(12)

2.2依据定时器和捕获多普勒频率补偿捕获伪码相位
通过依据搜索频点更新本地再生伪码,减少了伪码速率变化引起的积累损失,但捕获伪码相位误差中仍存在多普勒频率偏移引起的伪码相位偏移。本文校正伪码相位偏移的基本思路是根据捕获多普勒频率和捕获时间对捕获伪码相位进行补偿[11]。

图6为伪码相位补偿的基本结构框图,具体步骤如下:
(1) 本地产生周期与无多普勒频率偏移时的伪码周期同步时钟;
(2) 定时器单元对同步时钟进行计数,并接收来自检测判决的单元检测标志及捕获多普勒频率;
(3) 计数器根据单元检测标志记录并存储每个搜索单元捕获到伪码相位时对应的起始采样时刻;
(4) 完成所有频率单元的搜索后,依据捕获多普勒频率输出捕获多普勒频点起始采样时刻与捕获结果输出时刻的时间间隔;
(5) 伪码补偿器接收捕获多普勒频率计算码速率变化修正系数,并根据来自定时器的时间间隔对捕获伪码相位进行补偿。

图6 伪码相位补偿的基本结构框图Fig.6 Flow chart of revising PN code phase
若多普勒搜索频点共M个,且在第m个搜索频点捕获成功,那么捕获伪码相位补偿值可以表示为

(13)
那么,经伪码相位补偿后的伪码相位偏差为

(TM+1-Tm)ΔηN,
(14)
3算法仿真与实现
用Matlab对常规算法及本文提出的改进算法进行了仿真,仿真时接收信号信噪比为-15 dB,伪码速率为1.023 MHz,码长为1 023个码片,多普勒频率变化范围为±90 kHz,多普勒搜索步进为5 kHz,相关时间为一个伪码周期,单次相关运算时间为6 ms,采用唐检判决策略,唐检计数上限取4。不考虑多普勒频率估计误差,随机设定接收信号的伪码相位,在不同的多普勒偏移下,分别对改进前后的捕获方法进行仿真。
伪码速率校正前后,伪码相关信噪比与多普勒频率偏移关系的仿真结果如图7所示。

图7 伪码速率校正前后不同多普勒频率下检测信噪比Fig.7 Curves of SNR versus Doppler frequency in different algorithms
从图7的仿真结果可以看出,本地再生伪码速率固定不变时,随着多普勒频移的增大,伪码相关结果信噪比逐渐减小,码速率变化修正系数造成的积累损失明显;依据搜索频点更新本地再生伪码后,随着多普勒频移的增大,伪码相关结果信噪比波动较小,相对于本地再生伪码固定不变,相关结果的积累损失明显减小。因此,依据搜索频点更新本地再生伪码能够补偿多普勒频率偏移所导致的码速率变化修正系数造成的积累损失。
伪码相位校正前后,捕获伪码相位偏差的仿真结果如图8所示。
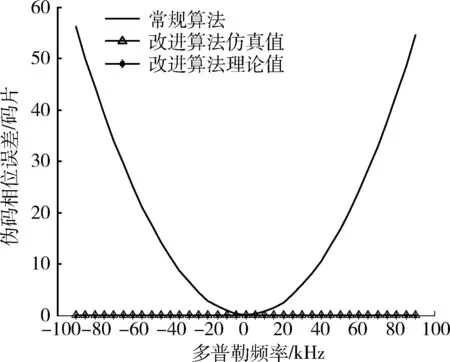
图8 伪码相位校正前后捕获伪码相位偏差Fig.8 Curves of code phase deviation versus Doppler frequency in different algorithms
从仿真结果可以看出,改进算法的仿真值与理论值相吻合,当采用全频点搜索策略时,常规捕获方法在多普勒频率偏移较大且信号捕获时刻与信号输出时刻的时间间隔较长的情况下,输出的伪码相位误差较大,不能满足捕获精度的要求;而改进后捕获方法的捕获伪码相位偏差明显减小,始终小于0.5个码片,高动态条件下扩频信号的捕获精度明显提高。
采用Xilinx的V4系列FPGA实现本文提出的改进捕获算法[12]。算法改进前后的FPGA资源消耗如表1所示。依据搜索频点更新本地再生伪码在本地伪码发生器的基础上不需要增加FPGA资源的消耗,用于捕获伪码相位补偿的定时器模块需要增加1个计数器、1个加法器和容量与搜索频点相匹配的RAM存储资源,伪码补偿模块需要增加1个通用乘法器和1个固定系数的乘法器,但这对于整个捕获算法的实现资源来说是微不足道的。因此,本文提出的改进捕获方法几乎没有增加实现资源,实现了高动态下捕获伪码相位误差的校正,提高了捕获精度。
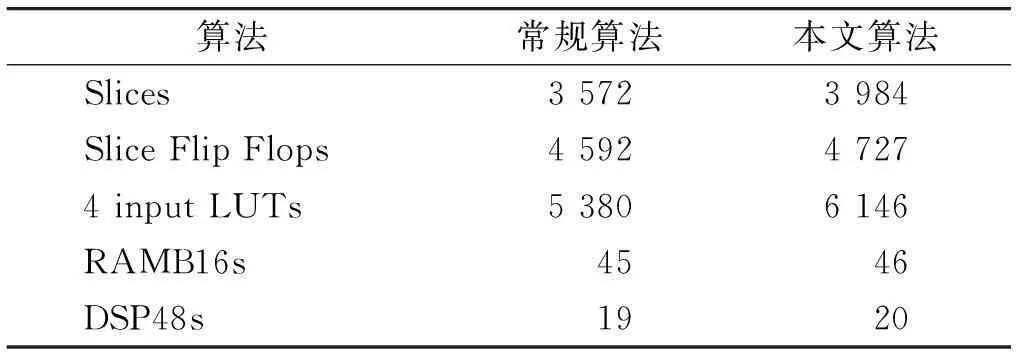
表1 算法改进前后的FPGA资源消耗
4结束语
本文分析了高动态情况下的相关积累损失和伪码相位误差,并提出了实时更新本地再生伪码及对捕获伪码相位进行多普勒补偿的校正方法。理论分析和仿真结果证明本文提出的改进方法能够在高动态条件下,将相关积累损失控制在1 dB以内,将伪码相位误差控制在0.5个码片以内。资源分析表明该算法能够在几乎不增加实现资源的情况下,提高捕获性能。
参考文献:
[1]王仕成,杨东方,刘志国,等.一种高动态GPS软件接收机方案研究[J].宇航学报,2009,30(3):1079-1084.
WANG Shi-cheng,YANG Dong-fang,LIU Zhi-guo,et al.Research on High Dynamic GPS Software Receiver[J].Journal of Astronautics,2009,30(3):1079-1084.
[2]祝露峰,章博,马志强.INS辅助高动态下GPS快速捕获半实物仿真研究[J].宇航学报,2011,32(1):150-155.
ZHU Lu-feng,ZHANG Bo,MA Zhi-qiang.Research on Hardware-in-the-Loop Simulation of INS-Aided GPS Fast Acquisition under High Dynamic Environment [J].Journal of Astronautics,2011,32(1):150-155.
[3]何晓峰,聂祖国,于慧颖,等.高动态条件下SINS 辅助GNSS 信号捕获的性能分析[J].中国惯性技术学报,2011,19(4):447-450.
HE Xiao-feng,NIE Zu-guo,YU Hui-ying,et al.Performance Analysis on High Dynamic Signal Acquisition Aided by SINS for GNSS Satellites [J].Journal of Chinese Inertial Technology,2011,19(4):447-450.
[4]王君,安建平,宋淑娟.一种新的高动态直扩接收机快速码捕获方法[J].北京理工大学学报,2004,24(5):439-465.
WANG Jun,AN Jian-ping,SONG Shu-juan.Rapid Code Acquisition for High Dynamic DSSS Receiver [J].Transactions of Beijing Institute of Technology,2004,24(5):439-465.
[5]赵琳,高帅和,丁继成.基于 FFT的高动态 GPS 信号捕获方法优化[J].系统工程与电子技术,2011,33(1):151-156.
ZHAO Lin,GAO Shuai-he,DING Ji-cheng.Improved Acquisition for High Dynamic GPS Signals Based on FFT [J].Systems Engineering and Electronics,2011,33(1):151-156.
[6]周三文,黄龙,卢满宏. FFT在高动态扩频信号捕获中的应用[J]. 飞行器测控学报, 2005,31(2):1437-1444.
ZHOU San-wen, HUANG Long, LU Man-hong. Acquisition of High Dynamic Spread Spectrum Signals with FFT[J]. Journal of Astronautics, 2005,31(2):1437-1444.
[7]陈荣,周旭,张士强. 扩频信号的捕获与跟踪[J]. 无线电工程, 2010, 33(5): 66-71.
CHEN Rong, ZHOU Xu, ZHANG Shi-qiang. Acquisition and Tracking of Signal in Spread Spectrum System[J]. Radio Engineering, 2010, 33(5): 66-71.
[8]方科. 高动态扩频信号捕获的多普勒补偿[J]. 四川兵工学报,2013, 22(7): 22-28.
FANG Ke. Research on Doppler Compensation in Acquisition of High Dynamic Spread Spectrum Signals[J]. Journal of Sichuan Ordnance, 2013, 22(7): 22-28.
[9]董智红,吴嗣亮. 大多普勒偏移下直接序列扩频信号捕获新方法[J]. 系统工程与电子技术,2008,35(8): 122-128.
DONG Zhi-hong, WU Si-liang. New Acquisition Method for DSSS with Large Doppler[J]. Systems Engineering and Electronics,2008, 35(8): 122-128.
[10]胡红军. 脉冲压缩雷达距离多普勒耦合对测距影响分析[J]. 现代雷达,2011, 20(12): 87-93.
HU Hong-jun. Range Error Analysis of Range-Doppler Coupling Effect to LFM Radar[J]. Modern Radar, 2011, 20(12): 87-93.
[11]陶仁,张楠,王颖. 线性跳频脉冲压缩信号中距离多普勒耦合影响分析[J]. 雷达与声纳导航, 2011,5(1):12-22.
TAO Ren,ZHANG Nan,WANG Ying.Analysing and Compensating the Effects of Range and Doppler Frequency Migrations in Linear Frequency Modulation Pulse Compression Radar[J].Radar, Sonar & Navigation,2011,5(1):12-22.
[12]陈源,袁嗣杰,章兰英. 基于FPGA的高动态扩频信号捕获系统的设计与实现[J]. 遥测遥控, 2008, 30(6): 77-82.
CHEN Yuan, YUAN Si-jie, ZHANG Lan-ying. Design and Implementation of the Acquisition of High Dynamic DSSS Signals Based on FPGA[J]. Journal of Telemetry, Tracking and Command,2008, 30(6): 77-82.
Research on Direct Sequence Spread Spectrum Signal Acquisition Method of High Dynamic Navigation Receiver
WANG Peng1,CHEN Guo-ying2
(1.Beijing Institute of Electronic System Engineering,Beijing 100854,China;
2.The Second Research Academy of CASIC,Beijing 100854,China)
Abstract:Traditionally, for direct sequence spread spectrum signal acquisition of high dynamic navigation receiver, the change of PN code rate and PN code phase caused by Doppler frequency offset will lead to integration loss and precision falling, which can severely impact the acquisition performance. An improved FFT based PN code fast acquisition algorithm is proposed to solve the problem above. The new algorithm updates local PN code in real time according to the searching frequency point and revises PN code phase based on the timer and captured Doppler frequency. Theoretical analysis and simulation results indicate that the new algorithm can improve the acquisition performance when the resource consumption is barely increased.
Key words:direct spread spectrum navigation signal;high dynamic;acquisition performance
中图分类号:TJ765;TN957.51
文献标志码:A
文章编号:1009-086X(2015)-02-0034-07
doi:10.3969/j.issn.1009-086x.2015.02.007
通信地址:100854北京142信箱30分箱E-mail:wp_fuyao@163.com
作者简介:王鹏(1982-),男,湖北武汉人。高工,硕士,主要研究方向为无线电导航。
基金项目:有
* 收稿日期:2014-03-26;
修回日期:2014-04-08