临近空间高超声速目标防御技术需求分析*1
2015-03-09刘超峰,王谷,张珍铭等
临近空间高超声速目标防御技术需求分析*1
刘超峰,王谷,张珍铭,陈凤,柳扬,梅小宁
(上海机电工程研究所,上海201109)
摘要:从临近空间高超声速武器目标特性出发,分析了临近空间导弹攻防特性,讨论了对临近空间高超声速目标防御中防空导弹设计的难点和不足。从中牵引出临近空间高超声速目标拦截系统的各个专业的技术需求,特别是对预警探测、导弹总体、制导控制等专业带来的新问题和新需求进行了详细分析。这些技术需求可以供临近空间防御能力建设和相关技术专业建设参考。
关键词:临近空间;防御系统;技术需求分析;高超声速飞行器;快速打击武器;导弹设计
0引言
新世纪以来,临近空间高超声速飞行器技术在世界各军事强国重视和推进下快速发展。2014年,为了加速将高超声速飞行器研究成果向实战应用转化,美军将新一代高超声速X飞行器(hyper-X, HX)计划调整为高超声速吸气式武器概念(hypersonic air-breathing weapon concept, HAWC)计划和战术助推滑翔(tactical boosting-gliding, TBG)武器计划,以满足美军防区外快响应打击能力的需求。临近空间高超声速武器预计在未来5~10年成为实施远程快速精确打击的空天核心装备。
临近空间快速打击武器是一种对抗传统防空反导防御系统的新型武器。区别于弹道导弹和常规航空区巡航导弹的突防和攻击方式,临近空间快速打击武器具有飞行速度快、横向机动能力强、在线轨迹规划灵活、末端大俯冲打击能力强、毁伤威力大、对防御系统响应时间大幅压制等特点,使得这类武器能够更加有效地实现机动再入、威胁规避和精确制导。
由于传统防空反导武器难以对临近空间高超声速目标进行有效拦截,研究针对临近空间高超声速目标的防御技术意义重大。本文试图从防空导弹设计的各个专业讨论对临近空间高超声速目标防御的难点和不足,并牵引出临近空间高超声速目标拦截系统的技术需求,以供临近空间防御能力建设和相关技术专业建设参考。
1临近空间高超声速目标防御军事需求分析
1.1临近空间快速打击武器目标特性
临近空间是指距海平面20~100 km的空域,介于传统航空器最高飞行空域与轨道航天器最低飞行空域之间,包括大气平流层(高度12~50 km)的大部分区域、中间层(高度50~80 km)和部分电离层区域(高度60~100 km)。临近空间飞行器分为低动态飞行器和高动态飞行器。主要的高动态目标按运行方式可以分为:高超声速巡航导弹(如X-51A)、再入滑翔和助推滑翔(TBG,如HTV-2和AHW)以及空天飞机(如X-37B)等。
临近空间环境特性对临近空间高超声速飞行器存在不同方面、不同层次的约束作用。由于超燃冲压发动机工作的条件限制,临近空间高超声速巡航导弹的巡航高度一般在18~24 km左右,巡航Ma数在5~6之间。临近空间高超声速滑翔导弹的滑翔高度与射程相关,一般比巡航导弹高。无论是高超声速巡航导弹还是高超声速滑翔飞行器,其航迹规划和俯冲点的选择除了需要满足精确打击的作战目标要求外,还需要满足多个再入飞行轨迹约束条件,包括过载、热流率、总加热量、最大表面温度、动压、配平升阻比等约束,这些约束条件限制了高超声速飞行器的飞行高度和速度。通过调研和分析,表1给出了以X-51A,AHW和HTV-2为代表的2类临近空间快速打击武器的参考目标特性[1-8]。(注:由于目标仍处于发展和试验阶段,不同出处的文献中几个典型目标的目标特性数值可能略有差异,表格中数值仅为参考)
1.2现有防空反导装备不满足临近空间防御迫切需求
国外已部署的典型防御系统中,有可能用于临近空间高超声速目标防御的系统有:美国陆基的战区导弹防御系统(PAC-3/Erint)、宙斯盾武器系统(标准系列拦截弹)、末段高层区域防御系统(THAAD)、欧洲防空导弹武器系统和反导武器系统(Aster-30)、俄罗斯凯旋防空导弹系统(S-400)等,其中PAC-3和Aster-30拦截高度小于20~24 km,THAAD的拦截空域为40~150 km(注:有文献报道为30~150 km),标准-6的拦截空域则为70~370 km的大气层内高空到大气层外的广阔空域[9],中间存在20~40 km间断的空白区域,而这一区域正是高超声速武器快速发展的区域。表2给出了较高RCS条件下某防空系统拦截临近空间高超声速武器的仿真结果[10]。可以看到,现有防御系统难以适应临近空间高超声速目标的飞行特性。
分析临近空间防御难点,现有防御系统对临近空间高超声速目标拦截存在的不足为:
(1) 预警探测能力不足
临近空间高速飞行器比传统的巡航导弹、作战飞机目标RCS小、飞行速度快,比弹道导弹飞行高度低。如果使用现有的防空导弹武器系统预警探测体系进行目标探测,小RCS加上超高速度导致防空雷达的探测威力下降,留给拦截导弹的反应时间会很短。加上通过雷达组网、浮空雷达、预警机、低轨卫星等手段组网探测时间,以及反导系统通讯、评估、决策等时间,临近空间拦截系统的预警时间不超过10 min。而X-51A的工作时间为800 s左右,这留给拦截系统的反应时间更短,防御响应时间受到大幅压制。
(2) 制导控制能力不足
由于临近空间目标高速飞行,常规防空武器地面的制导雷达和导引头对其稳定跟踪将面临困难。由于临近空间空气稀薄,舵面效应急剧降低,导弹控制时间常数增加,无法提供导弹所需操作力矩,导致导弹无法按照导引律要求的弹道飞行,逐渐偏离理想弹道,最终无法实现中末制导,即使勉强交班也会因为制导误差过大而无法击中目标。对于末段有直接力的拦截武器,由于直接力控制燃料受质量限制,也不能长时间提供足够的过载。
(3) 拦截速度和机动不足
现役拦截导弹的平均速度约在1 000~1 500 m/s范围,而高超声速目标的速度在1 800 m/s以上,若按照比例导引律拦截,需要导弹速度大于目标速度1.2倍以上,这样导弹的末速应该在2 200 m/s以上,现役大多数地空导弹无法满足要求。同时,采用追踪目标的导引规律通常要求导弹具备相对于目标机动能力3倍的可用过载,而临近空间30 km高度的高超声速巡航导弹机动过载可达2左右,在临近空间空气动力有限的情况下,需要侧向直接力来填补需用过载的缺口。
(4) 拦截毁伤能力不足
临近空间高超声速飞行器长时间大机动飞行,目标轨迹难以预测,使用末端反导武器只能拦截机动能力较小的弹道式目标,难以对高超声速目标进行动能碰撞杀伤。若使用破片式战斗部导弹, 由于引战配合需要一定时间,无法对相对速度超过3 000 m/s的目标进行有效毁伤。此外, 目前弹道导弹再入角度基本在60o内,而临近空间高超声速巡航弹采用天顶攻击,落地角80°~90°。受交会角的约束,拦截系统的拦截空域相对弹道导弹、战斗机等目标大大减小。
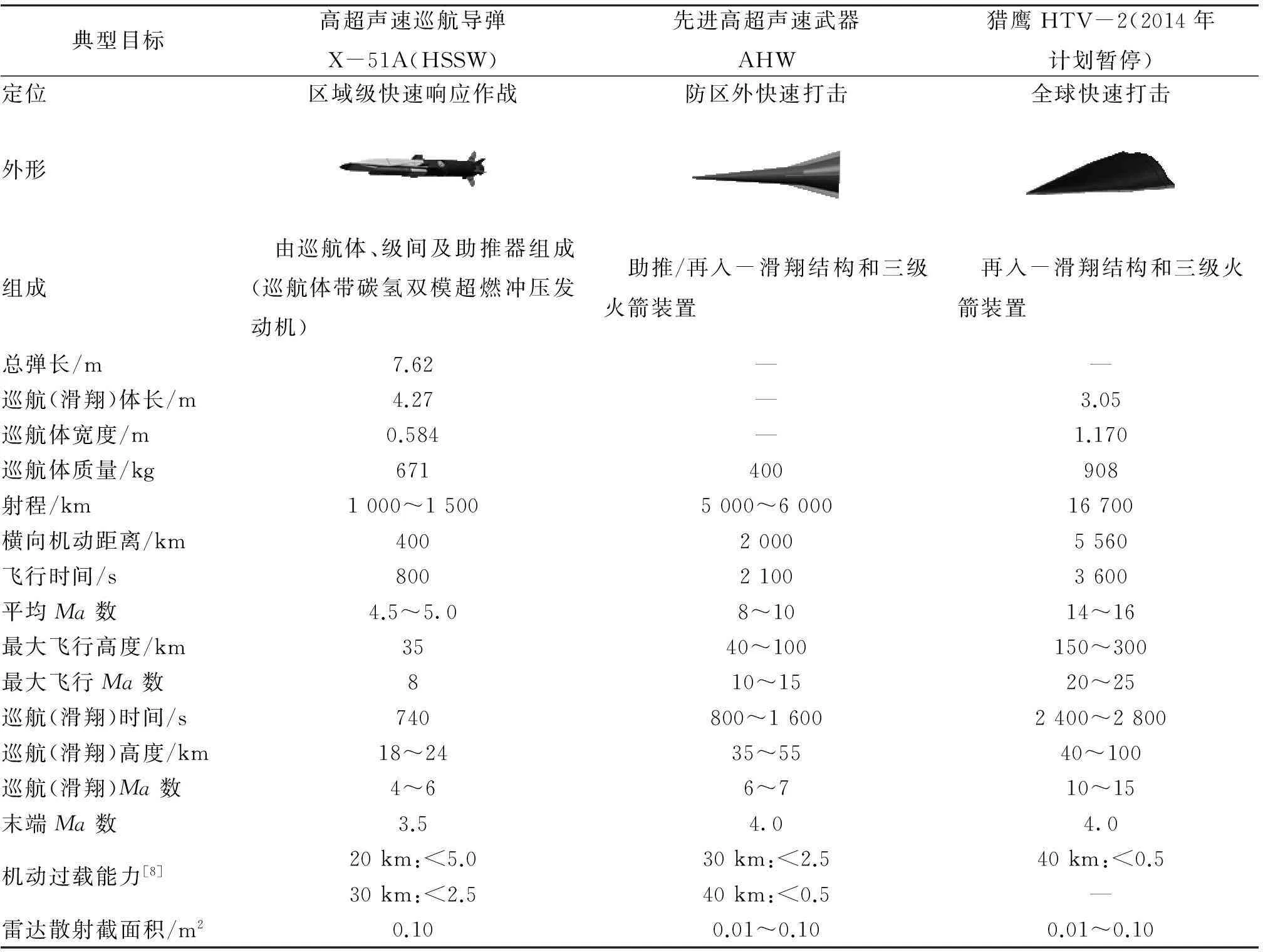
表1 典型临近空间高超声速参考目标特性

表2 现有某防空系统在不同条件下高超声速武器被拦截概率
2临近空间高超声速目标防御作战设想
临近空间高超声速武器的作战样式特殊且灵活,并且临近空间高超声速武器装备仍在发展的过程中,它的作战理论也在发展中。一般而言,临近空间高超声速武器的作战样式可以分为单机作战和联合作战,单机作战可以作为直接攻击武器搭载平台、投射导弹或弹头武器搭载平台、作为C4ISR(command,control,communication,computer,intelligence,surveillance,reconnaissance,信息通讯指挥攻击系统)平台使用平台、作为空间载荷平台和运输平台。以高超声速巡航导弹X-51A直接攻击地面高价值目标为例子,高超声速武器进攻过程主要包括发现远程目标、制定作战计划、数据装载、发射阶段、高速巡航、俯冲攻击和打击效果评估7个阶段[11]。
防御临近空间高超声速目标,可以在其飞行的助推段、惯性段、动力巡航段或无动力滑翔段以及下压攻击段进行拦截。由于临近空间高超声速飞行器惯性飞行段往往处于数千甚至上万km之外,且飞行时间只有十几min,拦截武器系统需要在短短十几min的反应时间内完成预警、目标锁定、变轨机动攻击,反应时间不足,技术难度大。在滑翔/跳跃段的中末段,由于精确制导和多个俯冲再入约束条件的限制,临近空间目标的高度和速度均有所下降。相对而言,动力巡航段或无动力滑翔段拦截留给拦截系统的反应时间多,是一个可以选择的拦截时机。表3比较了各阶段拦截的优缺点[12-16]。
为了研究临近空间攻防技术特点和技术需求,本文以拦截动力巡航段/无动力滑翔段的临近空间高超声速目标开展研究。拦截巡航段/滑翔段的临近空间高超声速目标的一个主要作战过程想定如下:
(1) 由预警卫星、空基预警平台等预警探测设备实现对临近空间高超声速目标的预警探测与跟踪,并向目标指示雷达提供信息。
(2) 目标指示雷达截获目标,通过指挥控制系统进行威胁判断,确认威胁目标后,引导跟踪制导雷达捕获目标。
(3) 跟踪制导雷达捕获目标后,对目标实施精确跟踪,并提供给火力控制系统进行发射诸元解算,控制导弹发射。
(4) 导弹发射后,跟踪制导雷达继续跟踪目标,通过指令数据链设备向导弹提供修正指令,控制导弹实现中制导飞行。
(5) 当导弹进入末制导前,进行中末制导交班,确保弹上末制导设备截获并跟踪目标,通过直气复合控制修正制导误差,在规定的脱靶量内实现与目标的交会,并对其进行有效毁伤。
3临近空间高超声速目标防御技术需求分析
3.1预警探测技术需求
临近空间高超飞行器速度快、射程远、机动性强,对这类目标需要远距离、大空域防御或拦截。通常系统的预警探测能力要达到1 000 km以上,才能赢得必要的作战反应时间。因此,对于反临近预警探测可采用前置的或多平台的(天基、空基、地基和海基)传感器实现远程预警、探测,提高早预警早发现能力。
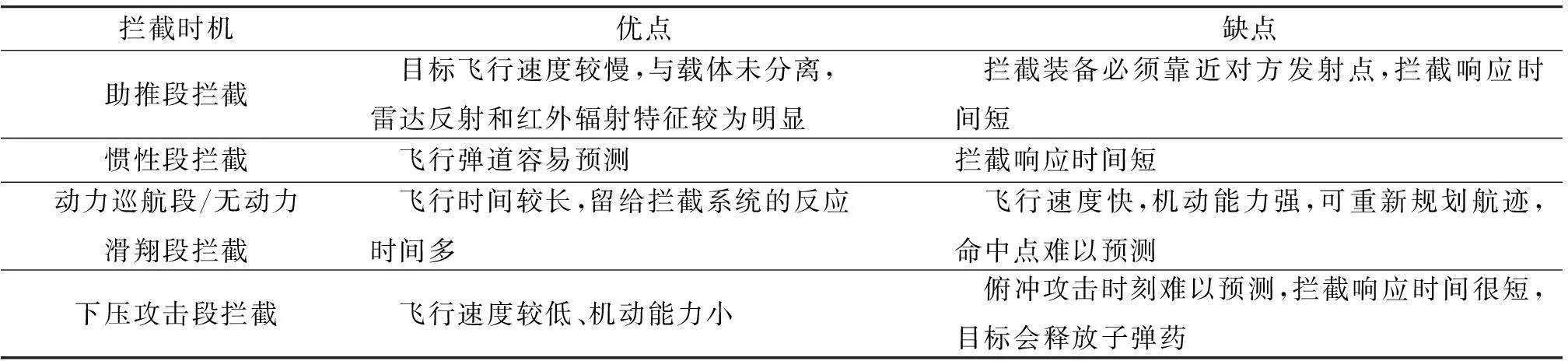
表3 临近空间高速目标各飞行阶段拦截优劣
单部地基雷达由于地球曲率限制不能满足有效拦截作战的需求。如果需要达到1 000 km的最大探测距离,则需要增大探测制导平台的高度。
临近空间电离层环境和高速飞行等离子体效应可能对高超声速目标的探测存在影响。按照对离解、电离划定标准的定性的分析估计,当Ma<10时,绕流流场基本没有电离发生,主要是离解反应,因而流场中的电子、离子分量将很小。因此,Ma数为10是绕流流场电离状态由弱到强的转变点。根据多个通讯频段的测试数据,可以认为在电离层60 km以下,飞行Ma数在10以下的高超声速目标在飞行过程中无“黑障”现象,且飞行中产生的等离子体不会使得目标的RCS(radar cross section,雷达散射截面)减小。
由于高超声速飞行器的等离子体鞘套绕流流场具有极高的温度,红外特性非常明显;此外,由于光波和太赫兹波频率远高于高速目标等离子体碰撞频率,受等离子体鞘套的吸收较弱,能够几乎无损失地穿过等离子体鞘套探测目标,因此从理论分析和飞行试验上来看,红外、激光雷达和太赫兹波雷达有望成为探测临近空间高速飞行器的有效手段。若要对覆盖等离子体鞘套的高超声速飞行器进行探测和识别,需要模拟较真实的飞行器等离子体鞘套,研究其红外辐射特性、激光雷达散射特性和太赫兹波雷达散射特性,为探测和识别提供依据。
表4比较了4种预警探测系统用于临近空间高超声速目标预警和探测的优缺点。
3.2指挥控制技术需求
传统防空导弹是以火力单元为基本作战组合进行防空作战,防空导弹火力单元内指挥控制系统、制导雷达、发射装置和导弹等各作战装备之间存在着固定的隶属关系,不同火力单元内的作战装备不能进行相互操作。随着现代空袭的体系化、网络化作战能力的提升,传统的防空导弹指挥控制系统面临着巨大挑战,主要表现在:①网络化能力弱,无法发挥武器系统协同作战的优势;②战场生存能力低,抗毁能力弱,抗干扰能力弱。

表4 各种预警探测系统的比较
防御临近空间高超目标需要指挥控制系统具有更强的通讯、火力重组、资源共享、准确识别、准确发射参数装订、快速处理的全自动管理能力,将空天领域已建的和未来要建立的各级各类空天信息指控系统和各种探测传感器相互连接到一起,实现对空天信息传感器的一体化指挥控制和对空天信息的一体化管理与分发,实施统一指挥控制和火力控制。指挥控制网络系统可以采用扁平化控制技术和宽带通信技术,在系统间快速传输数据、快速决策处理和快速作战效果评估,同时可以动态重构系统网络,增强抗毁伤、自愈能力。
3.3导弹总体技术需求
临近空间高动态目标具有两大明显的运动特征:高速和机动。由于目标高速使得传统采用追踪目标的导引规律的防空导弹无法保证速度优势;由于机动存在造成运动轨迹无法精确预报,使得反弹道导弹所采用的逆轨拦截思路在临近空间高超声速目标的拦截中受到很大局限性。因此,临近空间拦截导弹总体设计的一个核心目标就是在小弹目速比(速比可小于1)的条件下降低拦截导弹的需用过载。为了达到这一目标,在总体设计方面首先要考虑良好的拦截策略和导引规律,如某种结合迎头拦截策略和比例导引律的改进算法。
临近空间拦截导弹作战对象多,作战空域广,要求拦截导弹必须具备良好的速度特性和质量特性。更高的平均速度和末级速度可以提高导弹的响应时间,降低导弹的需用过载;更小的导弹质量可以提高采用轨控发动机的可用过载。在气动外形设计方面,有需求采用二级或多级设计以改善速度特性和质量特性,并需要优化设计平衡气动性能和操纵性能。在动力设计方面,导弹快速响应要求具备快速初始转弯能力,同时更多的作战任务需要多级发动机、多推力发动机和多脉冲发动机的综合运用。在结构防热方面,拦截导弹虽然不存在如高超声速目标那样复杂的热管理需求,但仍需格外小心高温特别是高加热率的气动热环境以及采用大功率导引头后严酷的舱内热环境。最后,临近空间拦截导弹应考虑具备在较宽工作包络线所需的可控性和鲁棒性,要求导弹具备在相关环境的生存能力和毁伤能力,尽量采用简便的、灵活的、可替换的组成构件。
3.4精确制导技术需求
临近空间拦截导弹对高超声速目标的拦截距离远,在远距离飞行中,由于目标的位置信息会发生变化,为确保导弹能够被准确引导到目标附近,需要选择合理复合制导体制以实现高概率交班和精确制导。
高超声速目标由于RCS小、速度大,留给拦截导弹的反应时间很短,要求制导雷达的截获距离足够远。同时,当目标速度大时其飞行轨迹相对制导雷达有一定航路角的情况下,会导致制导雷达的目标跟踪系统有一定的动态滞后误差,造成跟踪质量下降。因此,拦截导弹对制导雷达的需求应是在低仰角条件下的远距离截获能力、快速检测能力和高精度连续跟踪能力。
导弹的精确制导能力取决于导弹在末制导段对于初、中制导的初始误差的修偏能力,而这一能力取决于导弹末制导段的控制刚度。在迎头拦截的过程中,由于弹目相对速度很大,需要增加末制导导引头的作用距离以改善导弹的控制刚度。同时,还需求提高导引头的测角精度(或角加速度精度)以降低比例导引律对拦截导弹的需用过载。
使用雷达导引头可以获得目标距离信息或速度信息,缺点是体积大、质量大。如果采用雷达相控阵导引头,除了需要增加导引头的作用距离和测角精度之外,还需要进一步考虑相控阵解耦问题、天线优化设计问题和防热设计问题。光学导引头在低空作用距离近,高空作用距离远,使用光学导引头的优点是体积小、质量轻、制导精度高,在不考虑目标机动的情况下可以满足直接碰撞目标的要求,但存在全天候能力和弹载环境适应能力相对不足的问题。如果采用光学导引头,则除了考虑中末制导交班问题外,还需要进一步考虑气动光学效应抑制及校正问题,其中进一步地包含湍流流场控制、头罩或侧窗隔热和制冷以及在气体辐射覆盖本体和近距离辐射饱和条件下目标分割问题等。如果采用复合末制导技术,则需要考虑数据对准、航迹关联、航迹融合、目标识别等问题。
3.5精确控制技术需求
传统导弹的快速响应能力受制于弹体的固有特性,随着导弹速度、飞行高度等参数变化而变化。导弹速度越低,拦截空域越高,弹体响应越慢,在低空一般需要0.3 s左右,在中高空需要0.7 s~1.8 s左右,在高空需要2 s左右,而且高空空气稀薄,无法产生足够的升力和机动过载能力。因此,临近空间拦截导弹必须采用直接力(reaction control system, RCS)改善控制响应时间,增加导弹可用过载。
直接力实现方式有姿控、轨控和姿轨控3种方式。轨控方式即为直接力操纵方式,要求横向喷流装置不产生力矩或产生的力矩足够小。为了产生要求的直接力控制量,通常要求横向喷流装置具有较大的推力,并且希望将其放在质心位置或离质心较近的地方,以免产生绕质心的干扰力矩。姿控方式要求横向喷流装置产生控制力矩,不以产生控制力为目的,但仍有一定的控制力作用。控制力矩改变了导弹的飞行攻角,因而改变了作用在弹体上的气动力。这种操纵方式不要求横向喷流装置具有较大的推力,但要能产生较大的绕质心转动的力矩,通常希望将其放在远离质心的地方。
表5比较了一些主要现役型号的姿控、轨控和姿轨控直接力的使用方式和技术特点。可以看出,采用何种直接力形式应综合考虑具体作战任务和作战环境。使用直接力牵引出来的需求包括喷流干扰流场影响分析、直气复合控制策略等等。需要特别指出的是,作为临近空间拦截导弹系统设计的核心环节,直接力设计的成败,不仅仅是控制系统设计的问题,更多的是总体优化设计问题。例如为了利用临近空间有限空气动力与侧向直接力复合,需要导弹总体设计在稳定性和操纵性寻找最佳平衡点。此外,末制导段直接力控制为了避免喷流干扰和过载损失,以及临近空间拦截导弹的引战配合会对导弹的姿态角、弹目相对位置有一定的需求,进而要求弹道、制导、控制之间相互协同。这些需要临近空间拦截导弹进行更深入的总体—制导—控制一体化设计。
3.6引战技术需求
防空反导导弹杀伤方式有2种:战斗部杀伤和直接碰撞杀伤。考虑到临近空间高超声速目标的机动性和轨迹不可预测性,很难采用直接碰撞杀伤。如果采用直接碰撞的杀伤方式,需要进一步采用高制导精度的光学制导体制,并在导引规律上对目标机动进行预测和补偿。
如果采用传统破片式战斗部对其进行毁伤,则在弹目相对速度很大的情况下, 破片式战斗部由于引信感知目标到引爆战斗部需要一定时间,采用定角引信不能在最佳时间起爆,降低战斗部的杀伤性能,甚至出现导弹穿越目标后才起爆。因此,临近空间拦截导弹应采用测距的制导/引信一体化(guidance integrated fuzing, GIF)设计技术,避开测速GIF引信在大相对速度时存在的多普勒盲区问题,利用毫米波导引头的毫秒级脉冲测距信息,实现引信的前向探测和高效的引战配合,同时,临近空间拦截导弹的战斗部杀伤应采用慢速释放或有系留装置的杀伤增强器,有利于降低系统的反应时间要求,提高对临近空间高动态目标的毁伤效果。

表5 直接力方式比较
4结束语
为了更好建设临近空间防御能力,发展相关技术专业,本文从临近空间高超声速武器目标特性、临近空间导弹攻防特性出发,分析临近空间高超声速目标防御的难点和不足,并详细分析由此牵引出对临近空间高超声速目标拦截系统的技术需求。总体而言,高超声速目标防御系统或拦截导弹的技术难点存在于各个专业领域,难度大,集成度高,既需要各专业的技术攻关与技术进步,更需要各专业的一体化协同优化设计。
参考文献:
[1]CROFT J. Weapons Delivery Goes Hypersonic [J]. Aerospace America,2004, 42(5): 38-42.
[2]LI Yu, CUI Nai-gang. Maximum Crossrange for Hypersonic Boost-glide Missile [C]∥Systems and Control in Aerospace and Astronautics, ISSCAA 2nd International Symposium, IEEE,2008: 1-6.
[3]HU Shi-guo, FANG Yang-wang, GAO Xiang. A New Optimal Guidance Law for Near Space Hypersonic Vehicle Based on Markov Jump Linear System [C]∥Proceedings of the 2011 Chinese Control and Decision Conference (CCDC), IEEE,2011: 478-482.
[4]FULGHUM D A, WALL R. Hypersonic Weapons Attack Time Problem [J]. Aviation Week & Space Technology. 2000, 153(13): 88-89.
[5]DUAN Guang-ren, SUN Yong, ZHANG Mao-rui, et al. Aerodynamic Coefficients Models of Hypersonic Vehicle Based on Aero Database [C]∥Pervasive Computing Signal Processing and Applications (PCSPA), 2010 First International Conference, IEEE. 2010: 1001-1004.
[6]MIRMIRANI M, KUIPERS M, LEVIN J, et al. Flight Dynamic Characteristics of a Scramjet-Powered Generic Hypersonic Vehicle [C]∥American Control Conference, IEEE. 2009: 2525-2532.
[7]LI Shu-hong, ZHOU Yue-qing. Sliding Mode Controller for Air-Breathing Hypersonic Vehicle with Flexible Body Dynamics [C]∥Consumer Electronics, Communications and Networks (CECNet), 2nd International Conference, IEEE. 2012: 575-578.
[8]李海林, 吴德伟. 临近空间乘波体飞行器弹跳瞬间特性研究 [J]. 导弹与航天运载技术,2012, 319(2): 6-10.
LI Hai-lin, WU De-wei. Study on Bouncing-Moment Characteristics of Near Space Waverider Vehicles [J]. Missiles and Space Vehicles, 2012, 319(2): 6-10.
[9]魏毅寅. 世界导弹大全[M].3版. 北京: 军事科学出版社,2011.
WEI Yi-yin. World Missiles[M]. 3th ed. Beijing: Military Science Press,2011.
[10]徐勇勤, 唐硕. 高超声速武器攻防对抗分析 [J]. 弹箭与制导学报, 2005, 25(2): 91-93.
XU Yong-qin, TANG Shuo. Attack-Defense Countermine of Analysis on Hypersonic Weapon [J]. Journal of Projectiles,Rockets, Missiles and Guidance, 2005, 25(2): 91-93.
[11]王幸运, 王颖龙, 王还乡. 高超声速巡航导弹目标特性分析 [J]. 飞航导弹,2012(5):21-23.
WANG Xing-yun, WANG Ying-long, WANG Huan-xiang. Target Characteristics Analysis of Hypersonic Cruise Missile [J]. Winged Missiles Journal, 2012(5): 21-23.
[12]王还乡, 李为民, 上官强, 等. 高超声速飞行器巡航段拦截作战需求分析 [J]. 战术导弹技术,2012(2):36-40.
WANG Huan-xiang, LI Wei-min, SHANGGUAN Qiang, et al. Analysis of the Battle Demand to Interception on the Cruise Phase of Hypersonic Vehicle [J]. Tactical Missile Technology,2012(2):36-40.
[13]张晓岚, 王海涛, 俞海, 等, 反临近空间高超声速目标策略分析 [J]. 上海航天. 2013, 30(1): 48-52.
ZHANG Xiao-lan, WANG Hai-tao, YU Hai, et al. Strategic Analysis of Intercepting Hypersonic Vehicle in Near Space [J]. Aerospace Shanghai,2013, 30(1): 48-52.
[14]LI Yu, CUI Nai-gang. Optimal Attack Trajectory for Hypersonic Boost-Glide Missile in Maximum Reachable Domain [C]∥International Conference on Mechatronics and Automation, IEEE,2009: 4012-4017.
[15]HU Jun-hua, LIANG Xiao-long. An Approach of Intercepting in the Near Space Based on AKF [C]∥Proceedings of the 30th Chinese Control Conference, IEEE,2011: 3489-3493.
[16]MENG Zhong-jie, HUANG Pan-feng, YAN Jie. Trajectory Planning for Hypersonic Vehicle Using Improved Sparse A*Algorithm [C]∥ International Conference on Advanced Intelligent Mechatronics, IEEE,2008:1152-1157.
Technical Requirements Analysis of Air Defense System Intercepting Fast Attack Weapons in Near Space
LIU Chao-feng, WANG Gu, ZHANG Zhen-ming, CHEN Feng, LIU Yang, MEI Xiao-ning
(Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109, China)
Abstract:In order to figure out the new problems and technical requirements of near space defense, the target characteristics of the hypersonic vehicles and the attack-defense characteristics in near space are investigated, and the difficulties of building the air defense system intercepting those fast attack weapons are analyzed. Specifically, the technical requirements of detection, guidance, control and missile design are analyzed. The analysis of the technical requirements can provide a reference for the building of near space defense systems and the development of relative professional disciplines.
Key words:near space; defense system; technical requirement analysis; hypersonic vehicle; fast attack weapon; missile design
中图分类号:E844;TJ76
文献标志码:A
文章编号:1009-086X(2015)-05-0018-08
doi:10.3969/j.issn.1009-086x.2015.05.004
通信地址:201109上海市闵行区元江路3888号航天八部十室E-mail:liucf@fudan.edu.cn
作者简介:刘超峰(1978-),男,海南儋州人。高工,博士,研究方向为飞行器总体设计。
基金项目:上海市科学技术委员会资助课题(13QB1401500)
*收稿日期:2014-10-14;修回日期:2015-02-06