基于矢量控制的永磁同步电机控制系统的仿真
2015-03-04刘慧敏葛永强常亚辉张晓磊庞继文
刘慧敏 ,葛永强 ,常亚辉 ,张晓磊 ,庞继文
(1.北京航天控制仪器研究所,北京 100854;2.北京机械设备研究所,北京 100039;3.北方自动控制技术研究所,太原 030006)
基于矢量控制的永磁同步电机控制系统的仿真
刘慧敏1,葛永强2,常亚辉1,张晓磊3,庞继文3
(1.北京航天控制仪器研究所,北京 100854;2.北京机械设备研究所,北京 100039;3.北方自动控制技术研究所,太原 030006)
介绍了三相永磁同步电机常用的坐标系以及不同坐标系下的数学模型,并通过采用矢量控制方法实现电机的转速控制。在MATLAB6.5中的Simulink环境下,通过建立PMSM本体、坐标变换、电源逆变器、PI调节器等模块,搭建了永磁同步电机控制系统的速度和电流双闭环仿真模型。仿真结果验证了永磁同步电机矢量控制的正确性与可行性,为永磁同步电机控制系统设计提供了理论基础。
永磁同步电机,矢量控制,MATLAB仿真,PI控制
0 引言
三相永磁同步电机(Permanent Magnet SynchronousMotor,简称PMSM)是从绕线式转子同步伺服电机发展而来的。它用强抗退磁的永磁转子代替了绕线式转子,因而淘汰了容易出故障的绕线转子同步伺服电机的电刷。克服了交流同步伺服电机的致命弱点,同时它兼有体积小、重量轻、惯性低、效率高、转子无发热问题的特点。因此,它一经出现,便在高性能的伺服系统中得到了广泛地应用。
永磁同步电机矢量控制是一种先进的控制思想,是德国学者Blaschke于1971年提出,相对于转速开环的控制,矢量控制法可以提高电机的动静态性能。它的出现对电机控制基础的研究具有划时代的意义,使电机控制技术的发展步入了一个全新的阶段。在此后的20多年里,矢量控制技术获得了广泛应用,交流伺服驱动系统逐步替代了直流系统,国内外许多学者在此基础上进行了许多实际的控制,提出通过利用解耦的思想,模仿直流电机的工作控制方法,通过坐标变换将交流电机的电流解耦为可直接控制的直流信号。也就是说使定子电流的直轴分量,通过控制来达到控制电机的目标。
本文应用MATLAB6.5中的Simulink建立基于矢量控制的永磁同步电机的仿真模型,通过仿真验证了矢量控制方法的可行性,为进一步研究电机控制提供了参考依据。
1 永磁同步电机矢量控制
1.1 三相永磁同步电机的数学模型
分析永磁同步电机常用的坐标系有:ABC坐标系、αβ坐标系、dq坐标系。ABC坐标系即电机三相定子静止坐标系,是以同步电机三相定子电枢绕组为坐标的自然坐标系;αβ坐标系即电机两相定子静止坐标系,轴系放在电机定子上,α轴与A相轴线重合,采用两相正交等效绕组来代替三相绕组,实现了三相定子绕组之间互感的解耦;dq坐标系即电机磁场坐标系,是放在电机转子上的旋转坐标系,d轴为横轴与磁场轴线重合,q轴为转子纵轴与d轴垂直,坐标轴同转子一起旋转,d轴与α轴之夹角为θr。图1为永磁同步电机常用的各坐标系关系。

图1 同步电机常用的各坐标系关系
分析永磁同步电机最常用的方法就是dq坐标系数学模型,它不仅可用于分析永磁同步电机的稳态运行性能,也可用于分析电机的瞬态性能。建立永磁同步电机的数学模型之前,作如下假设:
①忽略铁心饱和,不计涡流和磁滞损耗;
②永磁材料的电导率为零;
③转子上没有阻尼绕组;
④相绕组中感应电动势波形为正弦。
这样,在dq轴坐标系中PMSM数学模型的分量形式为:
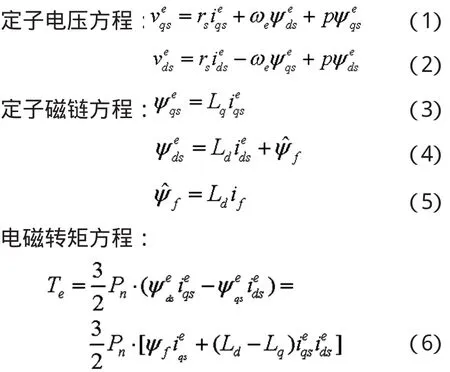
式中v为电压;
i为电流;
Ψ为磁链;
ds,qs为下标,分别表示定子直轴、交轴坐标分量;
e为上标,表示转子dq坐标系中变量;
ωe为转子旋转角速度(电角度表示),在PMSM稳态运行时等于电源同步角频率ωf;
rs为定子绕组的相电阻;
Ld,Lq为定子绕组的直轴、交轴电感,其中;
Lq=Lsσ+Lmq,Lsσ是 dq 线圈的 漏感,Lsd、Lsq是 dq轴定子线圈的励磁电感;
Ψ为转子永磁体磁链;
Te为电磁转矩;
Tl为负载转矩;
Pn为电动机极对数;
ωr为转子机械角速度;
J为转动惯量;
B为阻力系数;
P为微分算子;
PMSM数学模型在dq轴坐标系下的等效电路如图2所示。

图2 PMSM以dq轴系表示的电压等效电路
另一种常用的坐标系是αβ坐标系,其中dq轴坐标系与坐标系之间的关系如图1所示。在此坐标系下,PMSM数学模型为:

式中 vα、vβ为 αβ坐标系下电压;
iα、iβ为 αβ坐标系下电流;
rs为定子绕组的相电阻;
P为微分算子;
Lα、Lβ为定子绕组的、轴电感;
ωr为转子机械角速度;
Ψm为定子磁链;
θr为转角;
为了分析和运算,经常要对电机各坐标系之间进行互相转换。根据功率不变约束原则进行坐标变换,ABC坐标系、αβ坐标系、dq坐标系之间的换算关系如下:

以上变换适用于电压、电流、磁链的变换。
1.2 矢量控制
三相永磁同步伺服电机的模型是一个多变量、非线性、强耦合系统。为了实现转矩线性控制,就必须要对转矩的控制参数实现解耦。转子磁场定向控制是一种常用的解耦控制方法。转子磁场定向控制实际上是将dq同步旋转坐标系放在转子上,随转子同步旋转。其d轴(直轴)与转子的磁场方向重合(定向),q轴(交轴)逆时针超前90°电角度。
三相永磁同步伺服电机磁场定向矢量控制系统原理图如图3所示。系统采用id=0转子磁链定向控制方式,是一个速度环和电流环的双闭环系统。给定转速ωref,将测量的实时转速与给定转速ωref比较后进行速度PI调节,得到旋转坐标系的交轴参考电流iref。旋转坐标系中的交直轴电流分别进行电流环PI调节,得到电机所加电压,然后经过dq/αβ坐标轴变化得到电压空间矢量法SVPWM的输入,最后通过逆变器加到永磁同步电机上驱动电机旋转。图 3中,dq/αβ、αβ/dq 分别表示 dq 轴坐标系到 αβ轴坐标系的变换和逆变换。ABC/αβ表示ABC轴坐标系到αβ轴坐标系的变换。

图3 永磁同步电机矢量控制原理框图
2 基于MATLAB的PMSM伺服系统仿真模型
MATLAB是一种面向科学与工程计算的高级语言,它集科学计算、自动控制、信号处理、神经系统网络和图像处理于一体,采用M文件编程,语句简单,内涵丰富;界面友好,把编辑、编译、连接、执行、调试等多个步骤融为一体。同时MATLAB是一个高度集成的系统,MATLAB提供的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包,它支持线形和非线性系统,能够在连续时间域、离散时间域或者两者混合的时间域内进行建模,它同样支持具有多种采样速率的系统。另外,Simulink提供了一种图形化的交互环境,只需用鼠标拖动的方法就能迅速地建立起系统框图模型,其在系统仿真领域中已经得到广泛的承认和应用,许多专用的仿真系统都支持Simulink模型,这非常有利于代码的移植和使用。使用Simulink可以方便地对控制系统、DSP系统、通信系统以及其他系统进行仿真分析。
本文采用MATLAB/Simulink,以永磁同步电机为研究对象,对基于矢量控制的永磁同步电机控制系统进行了仿真,根据图3所示的原理图在MATLAB6.5环境下,利用simulink软件包,建立直观完整的模型,并依据所描述的系统模型的数学关系对整个系统进行仿真。
仿真框图如图4所示。

图4 永磁同步电机仿真模型框图
MATLAB6.5软件中包含的PMSM模块有误,本文依据永磁同步电机数学模型新建PMSM模块。该仿真主要分成3个部分:PI调节器模块、坐标变换模块、PMSM模块。
3 仿真结果
电机参数为 Ld=8.5mH,Lq=8.5mH,R=2.87Ω,Pn=4,U=200 V,J=0.002 1 kg/cm2,Te=1Nm。根据图 4建立仿真模型,得到两组仿真实验图形。图5~图7为当给定转速ωref=10 rpm时电机的一组波形,图8~图10为当给定转速ωref=400 rpm时电机的一组波形。分别为速度波形、电机电流id的波形、电机电流iq波形。

图5 ωref=10 rpm,电机速度波形

图 6 ωref=10 rpm,电机id波形

图 7 ωref=10 rpm,电机iq波形

图8 ωref=400 rpm,电机速度波形

图 9 ωref=400 rpm,电机id波形

图10 ωref=400 rpm,电机iq波形
从上面图形可以看出,当给定相同PI调节参数,当转速越小,速度超调量越大,过渡过程时间越长,而id,iq正好相反,超调量越小,过渡过程时间越短。
4 结论
本文对永磁同步电机建立数学模型,然后依据其数学模型在MATLAB/SIMULINK环境下对其进行仿真建模,进行矢量控制仿真实验。仿真结果表明,矢量控制方法可以对永磁同步电机达到有效控制,对电机进行实时速度跟踪,为后面的系统具体实现提供了有效的依据和参考。
[1]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.
[2]王成元,夏加宽,杨俊友.电机现代控制技术[M].北京:机械工业出版社,2006.
[3]王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004.
[4]黄忠霖.控制系统MATLAB计算及仿真[M].第2版,北京:国防工业出版社,2006.
[5]夏德钤.自动控制理论[M].北京:机械工业出版社,1999.
[6]Takeshita T,MatsuiN.SensorlessControland Initial Position Estimation of Salient-Pole Brushless DC Motor[J].Proceedingsof IEEE IECON.1996:18-23.
[7]Henneberger G,Brunsbach B J,Klepsch T.Field-Oriented Control of Synchronous and Asynchronous Drives Without Mechanical Sensors Using a Kalman Filter[J].1991,91(3)664-671.
[8]Tzou Y Y.High Performance Programmable ACPower Source with Low Harmonic Distortion Using DSP-based Repetitive Control Technique [J].IEEE Transaction on Power Electronics,1997,12(4):715-725.
[9]Chihchiang H.Two Level Switching Pattern Deadbeat DSP Controlled PWM Inverter[J].IEEE Transaction on Power Electronics,1995,10(3):310-317.
[10]王京锋,孙纯祥,马隽,等.无位置传感器无刷直流陀螺电机的控制与测速研究 [J].导航与控制,2006,5(2):54-63.
Simulation and Study of PMSM Control System Based on Vector Control
LIUHui-min1,GEYong-qiang2,CHANGYa-hui1,ZHANGXiao-lei3,PANG Ji-wen3
(1.Beijing Institute of Aerospace Control Device,Beijing 100039,China;2.Beijing Institute ofMachinery Device,Beijing 100039,China;3.North Automatic Control Technology Institute,Taiyuan 030006,China)
On the basis of the mathematical model of Permanent Magnet Synchronous Motor(PMSM),speed control system using the vector control theory is introduced in this paper.In Matlab6.5/Simulink,the isolated blocks,such as PMSM block,coordinate transformation block,three phase current source inverter controller block,PImodulation block etc are modeled.Then a double closed loop control system which consists of the inner current-loop and the outer speed-loop is constructed.The result of simulation testified the Vector Control theory is correct and realizable.
PMSM,vector control,MATLAB simulation,PIcontrol
TP31
A
1002-0640(2015)11-0135-04
2014-09-09
2014-10-07
刘慧敏(1979- ),女,山西忻州人,工程师。研究方向:电机控制。