高空救援工况下高空作业车运动学研究
2015-03-03吕志刘黎明
吕志,刘黎明
( 商丘师范学院 物理与电气信息学院,河南 商丘,476000)
高空救援工况下高空作业车运动学研究
吕志,刘黎明
( 商丘师范学院 物理与电气信息学院,河南 商丘,476000)
通过机器人机构学理论,采用D-H法则,参照既有高空作业车的现有参数,对其进行运动学分析.得到了各参数间的关系,为高空作业车的设计提供理论依据,同时为在不同情况下的实际操作提供理论依据, 并为高空作业车的轨迹跟踪与控制等打下基础.
高空作业车;救援; 机器人
0 引 言
高空作业车是一种特殊用途的工程车辆,也是一种用于高层建筑救援、消防的起重举升专用设备[1-3].当高空作业车用于高层建筑救援时,往往需要救援人员要在某一竖直平面进行高空作业[2].而由于目前高空作业车智能化水平的限制,通常需要设备操作人员同时操纵多个控制手柄来复合控制,才可以满足现场紧急救援情况下的需求,不过这样极大的降低了作业效率,也降低了目标控制精度,甚至在某些情况下很有可能发生灾难性后果,同时也增加了设备操作人员劳动强度.
综上所述,本文从机器人机构学理论角度,根据高层建筑救援工况下高空作业车的工况特点,参照既有高空作业车的现有参数,对其进行运动学分析,建立系统数学模型.为高空作业车在不同情况下的实际操作提供理论依据, 并为高空作业车的轨迹跟踪与控制等打下基础.
1 高空作业车系统的数学建模
1.1 简单概述
图1a所示为用于高层建筑救援高空作业车实物图,其工作平台的动作最终是由转台回转内的驱动马达、二级变幅油缸与飞臂变幅油缸的伸缩来综合实现的[4-5].该高空作业车系统可分为7个实体:车架支腿、车架底盘、回转转台、一级变幅油缸臂、二级变幅油缸臂、飞臂与作业平台.车架底盘由4个液压支腿固定,与水平地面保持平行;工作平台看成一个质量点,且该质量点通过无质量的飞臂与二级变幅油缸臂连接.为了得到高空作业车工作平台与各级油缸变量间的运动学关系,通过忽略转动摩擦力,本文将高空作业车的臂架系统简化为简单的运动链构成的,如图1b所示,也就是将每个杆件简化为最多只和另外两个杆件连接.
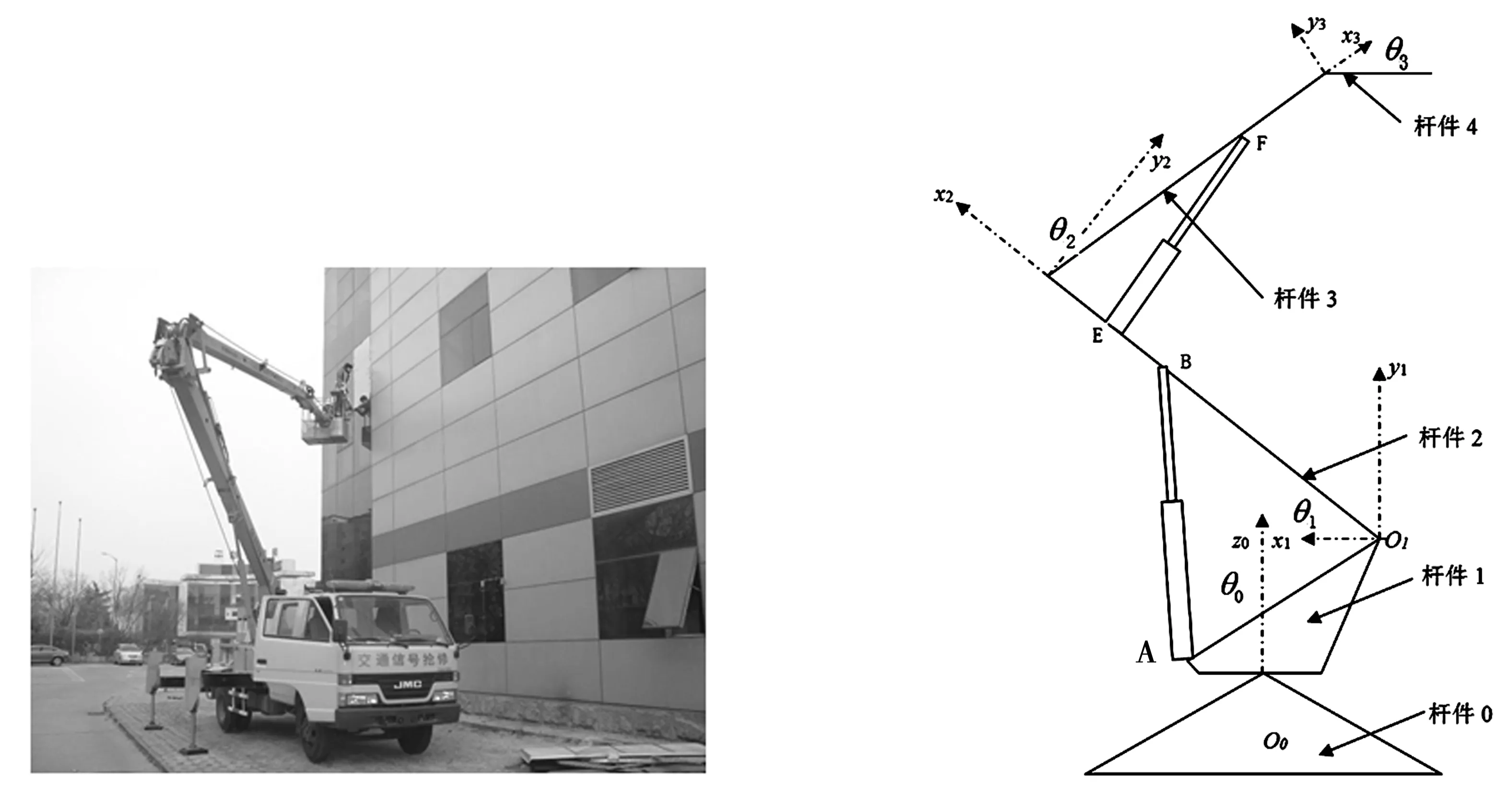
图1a 高空作业车实物图 图1b 杆件链系统
为了便于系统分析,如图1b所示,对各个杆件进行编号,基座为0号杆件,转台为1号杆件,一级变幅油缸臂、二级变幅油缸臂、飞臂依次为2、3、4号杆件,杆件的长度分别记为l0、l1、l2、l3、l4.运用D-H(Denavit-Hartenberg)坐标系建立方法,对其进行分析,得到各连杆局部坐标系.其中,各杆件与其局部坐标系x轴之间的夹角为关节转角θ,即可得到杆件0与其局部坐标系x0轴之间的关节转角为θ0,依次可得到杆件1、2、3、4杆件与其局部坐标系xi轴之间的夹角为关节转角θi;车架支腿高度为h.
由于高空作业车在高层建筑紧急救援时,工作平台一般沿着墙壁进行竖直面操作,为达到这一运动轨迹,通常操纵人员通过调节关节转角与杆件臂长来达到这一目的.而关节转角是由变幅油缸调节,变幅油缸臂是由其内部伸缩油缸调节.本位选取高空作业车系统的几何参数如表1所示.
表1 高空作业车的几何参数Fig.1 Geometric parameters of cherry picker
1.2 系统的运动学分析
由高空作业车的臂架系统简化图,如图1b所示,可以看出各局部坐标系之间的方位关系:
z0轴方向为竖直向上;x0轴方向为指向车身正前方,z1、z2、z3与z4轴向的方向分别垂直于转台、一级变幅油缸臂、二级变幅油缸臂、飞臂.x1轴方向与x0轴方向一致,x2、x3与x4轴向的方向分别平行于一级变幅油缸臂、二级变幅油缸臂、飞臂,且分别与o1o2、o2o3、o3o4方向一致.r为x0到x1公垂线的偏距.
根据机器人机构学理论,为确定第i个局部坐标系相对基坐标系的位置0Ti,可以通过齐次变换矩阵的连乘积0Ti=0A1·1A2…i-1Ai求得.该高空作业车操作平台处飞臂末端处为杆件4的坐标系,其与系统基坐标系的转换矩阵为0T4=0A1·1A2·2A3·3A4.
根据图1b所示各坐标系之间的位姿关系,可得到如下所示的变换矩阵关系:
0T1=cos(θ0) 0 sin(θ0)l0cos(θ0)sin(θ0) 0 cos(θ0)l0sin(θ0)0 1r0 0 0 1
(1)
1T2=cos(θ1) -sin(θ1) 0l1cos(θ1)sin(θ1) cos(θ1) 0l1sin(θ1)0 0 1 00 0 0 1
(2)
2T3=cos(θ2) -sin(θ2) 0l1cos(θ2)sin(θ2) cos(θ2) 0l1sin(θ2)0 0 1 00 0 0 1
(3)
3T4=cos(θ3) -sin(θ3) 0l1cos(θ3)sin(θ3) cos(θ3) 0l1sin(θ3)0 0 1 00 0 0 1
(4)
为了计算方便,记:s0=sin(θ0),c0=cos(θ0),c12=cos(θ1+θ2),s12 3=sin(θ1+θ2+θ3),c12 3=cos(θ1+θ2+θ3);
则由0T4=0A1·1A2·2A3·3A4与(1)(2)(3)(4)得(5)式
0T4=c0c123-c0s123s0c0(l3c123+l2c12+l1c1+l0)s0c123-s0s123-c0s0(l3c123+l2c12+l1c1+l0)s123c1230l3c123+l2c12+l1c1+r0 0 0 1
(5)
令作操作台的目标位置在其基坐标系中的位置为(x,y,z),由(5)可得到,高空作业车工作平台与一级变幅油缸臂、二级变幅油缸臂、飞臂和其关节转角在基坐标系下的几何参数关系(6)为:
x=c0(l3c123+l2c12+l1c1+l0)y=s0(l3c123+l2c12+l1c1+l0)z=l3c123+l2c12+l1c1+r
(6)
由该高空作业车在实际的救援过程中,首先将回转转台固定,将飞臂变幅油缸置于最大值,工作平台一般沿着墙壁进行竖直面操作,就此可以得出:
θ3=0
(7)
由(6)(7)可以推导出:
x=c0(l3c12+l2c12+l1c1+l0)y=s0(l3c12+l2c12+l1c1+l0)z=l3c12+l2c12+l1c1+r
(8)

(9)
同时,操作平台运动轨迹点和二级变幅油缸铰接点F处的角速度相等.
(10)
在△EO2F中存在如下三角关系:
(11)
(12)
根据高空作业车杆件的伸缩结构,工作平台的运动速度由臂伸缩油缸速度vl3与变幅油缸vθ 3速度制,在不影响整体效果情况下,为了便于分析研究取伸缩油缸的运动速度vl3为操作平台末端伸缩速度之半,由此可根据(9)(10)(11)(12)可得到(13)式:
(13)
2 参数间关系分析
为了设备操作人员能通过够复合控制来实现最优路径规划,先对上述各式中各参数间的关系进行分析是十分必要的,为了便于分析,参考现有高空作业车的型号,对部分参数进行对比分析,结果如下:
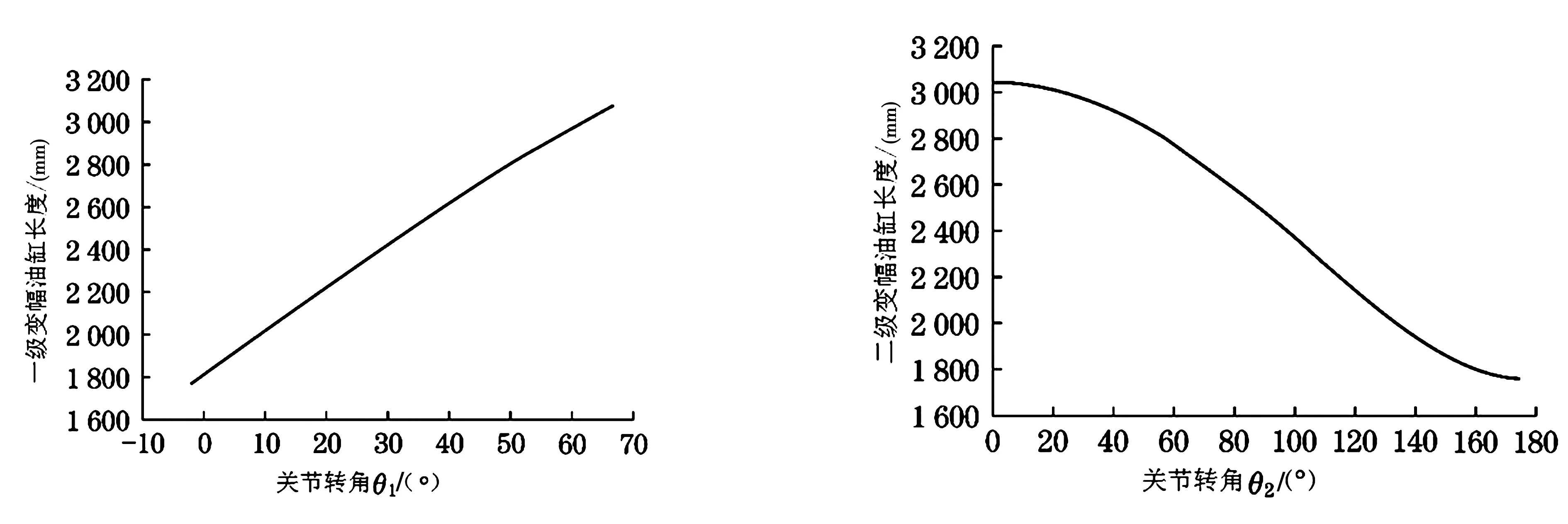
图2 一级变幅油缸与关节转角θ1关系 图3 二级变幅油缸与关节转角θ2关系
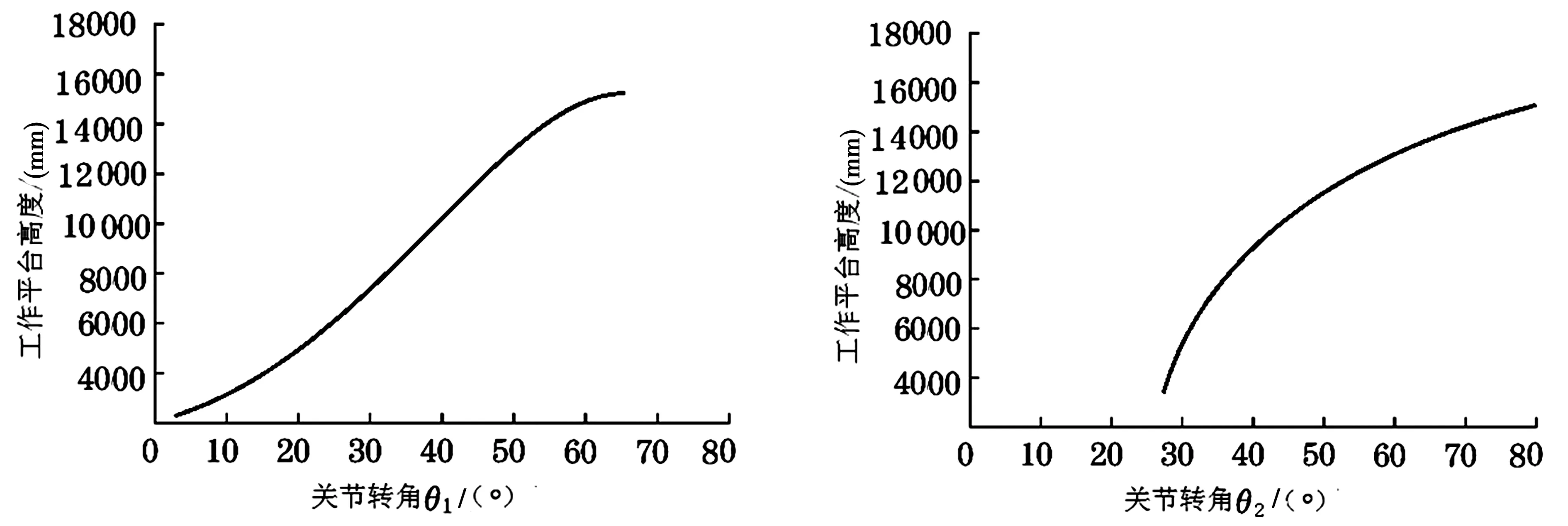
图4 工作平台高度与关节转角θ1关系 图5 工作平台高度与关节转角θ2关系
由对上述部分参数分析可知,关节转角θ1的变化与一级变幅油缸长度长度的变化有正相关性,关节转角θ2的变化与二级变幅油缸长度长度的变化有类似负相关性,符合高空作业车的实际操作经验.
在转角运动范围内,关节转角θ1的开始变化对工作平台高度的灵敏度不如关节转角θ2的开始变化对工作平台高度的灵敏度,同样也符合高空作业车的实际操作经验.
3 结 论
本文根据高层建筑救援工况下高空作业车的工况特点,参照既有高空作业车的现有参数,对其进行运动学分析,建立系统数学模型.为高空作业车在不同情况下的实际操作提供理论依据, 并为高空作业车的轨迹跟踪与控制等打下基础.
[1] 王硕.伸缩臂高空作业车轨迹跟踪控制方法研究[J].华中科技大学学报(自然科学版),2011(11):216-219.
[2] 张晨光.高空作业车竖直爬升工况的自动 控制系统研究[J]. 建筑机械,2012(4):72-81.
[3] 袁合.折臂式高空作业车轨迹规划与控制研究[D]. 大连理工大学,2013.
[4] 经迎龙.输入整形器在折叠式高空作业车防摆控制上的应用[J].噪声与振动控制, 2011(4):38-42.
[5] Johannes Karl Eberharter, Klaus Schneider. Control for Synchronizing Multi-Crane Lifts[C]. 2010 IEEE International Conference on Control Applications, Yokohama,2010:1302-1306.
【责任编辑:王军】
Research of the kinematics of aerial work platform trucks in the high altitude rescue conditions
LÜ Zhi,LIU Liming
(School of Physics and Electrical information Engineering, Shangqiu Normal University, Shangqiu 476000, China)
Through a series of theories of the robot & D-H, this paper carries on the kinematics analysis and establish the system mathematical model. The relationship of parameters obtained provide theoretical basis for the design and Operation of the aerial work platform trucks. It lays foundation for trajectory tracking and control of aerial work platform trucks.
aerial work platform trucks;rescue;robot
2014-06-11;
2014-09-02
吕志(1984-),男,河南商丘市人,商丘师范学院助教,主要从事智能机器人技术及其工程应用的研究.
TH21
A
1672-3600(2015)03-0043-04
