绳系卫星编队动力学及控制研究进展*
2015-03-01余本嵩文浩金栋平
余本嵩 文浩 金栋平
(南京航空航天大学机械结构力学及控制国家重点实验室,南京 210016)
引言
绳系系统作为空间探索的一种新型飞行器,在深空探测、样本采集、软攻防等领域具有广阔的应用前景[1-4].多体绳系卫星编队是绳系系统技术的重要扩展,由于具有可靠性强、稳定性高、成本低、易于重构等特征[5-7],使其在空间运输、极光观测、三维探察及干涉测量等方面被广泛重视[8-11].
多体绳系卫星编队是由两体绳系卫星系统演化而来,通常由多个卫星或航天器在空间范围内相对静止地组成某种特定的构形,同时星体间通过特制系绳连接,如图1所示.一般地,多体绳系卫星是进入预定空间轨道后再按照一定的任务要求展开成相应的编队构形,此外,还可以根据任务需求及变化进行编队重构.
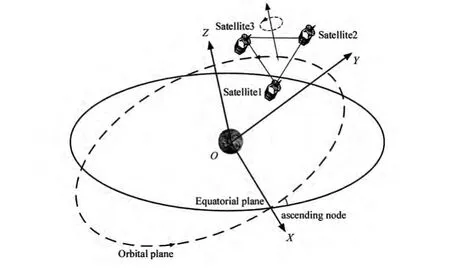
图1 多体绳系卫星编队系统Fig.1 The multi-tethered satellite formation system
绳系卫星编队所处空间环境特殊、自身构形种类繁多、柔性系绳动力学特性复杂,需要对编队构形及稳定性、周期运动、展开/回收动力学及控制、卫星刚体姿态的影响等开展研究.
1 编队构形及稳定性
空间多体绳系卫星系统以一定的编队构形在轨飞行,按照编队所占据的空间维度,系统构形可分为一维、二维及三维构形.一维构形,即编队系统中所有卫星都分布在一条直线上[12],如图2所示;二维构形,是指系统中全部卫星皆处于同一平面内,研究较多的构形有环形[13]、开轴-辐形[14]、闭轴-辐形[15]及TetraStar构形[16]等,如图3所示;三维构形,指的是系统中所有卫星不在同一平面内,此类构形较为复杂,典型的有四面体形[17]、双四面体形[18]、双金字塔形[19]等,如图4所示.此外,还有一些其它构形也同样受到关注[20-24].
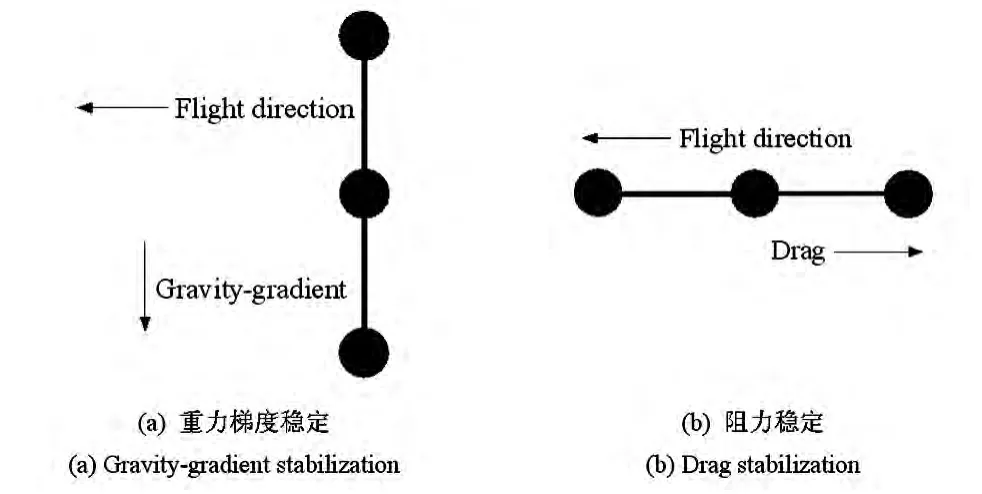
图2 一维构形Fig.2 One-dimensional configuration
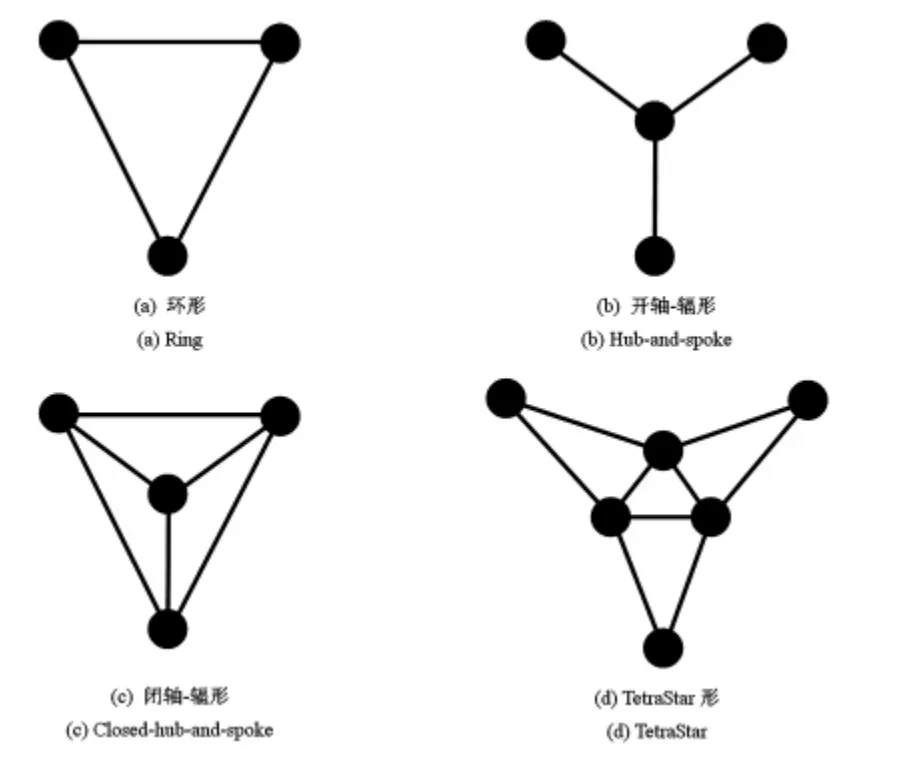
图3 二维构形Fig.3 Two-dimensional configuration
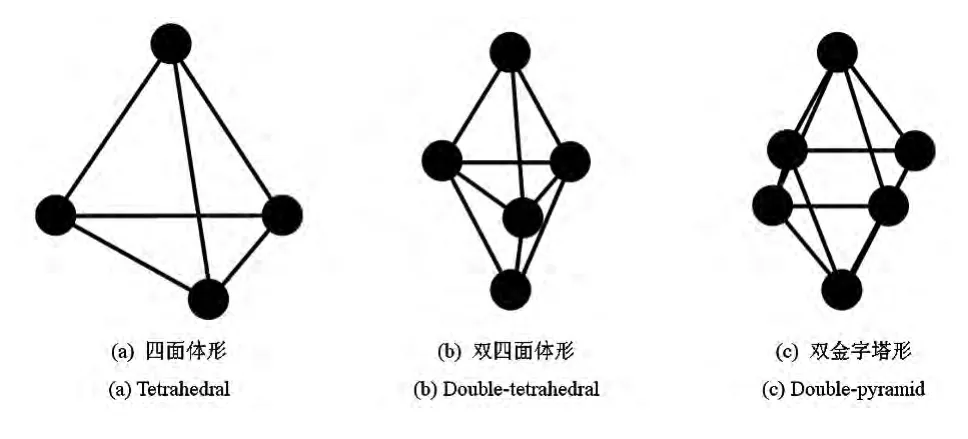
图4 三维构形Fig.4 Three-dimensional configuration
若按照绳系卫星编队的稳定飞行形式,系统还可分为静态构形和动态构形[25].对于静态构形,系统编队与轨道坐标系保持相对静止.静态构形主要包括一维重力梯度稳定构形,如图2(a)所示;一维阻力稳定构形,如图2(b)所示;二维重力梯度-阻力稳定构形,如图5(a)所示;二维重力梯度-电磁力稳定构形,如图5(b)所示.而对于动态构形,系统编队相对于轨道坐标系旋转,即飞行编队是通过系统自旋从而使系绳拉紧以达到稳定的目的.动态构形主要包括二维离心力稳定构形,如图6(a)所示;三维离心力-重力稳定构形,如图6(b)所示.需指出的是,以上提及的动态平衡构形其旋转轴通常都是指向地球表面或垂直于轨道平面.
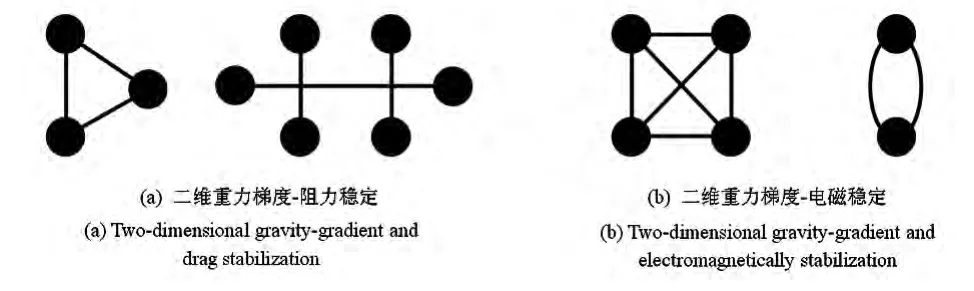
图5 静态构形Fig.5 Static configuration

图6 动态构形Fig.6 Dynamic configuration
除此以外,还存在一类较为特殊的相对平衡构形,即以Likins-Pringle相对平衡为基线的编队构形[26,27].Likins-Pringle平衡又可分为三种相对平衡状态,即编队构形分别呈圆柱形、双曲线形及圆锥形.这三种构形的旋转轴相对于轨道坐标系保持固定,且角速率与轨道平均角速率相同,其中,圆柱形的旋转轴垂直于轨道平面,如图7(a)所示;双曲线形的旋转轴垂直于当地垂线,如图7(b)所示;圆锥形的旋转轴垂直于轨道切线,如图7(c)所示.
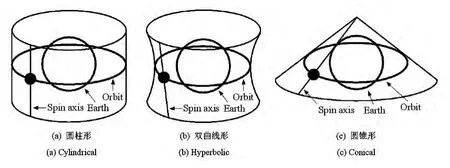
图7 相对平衡Fig.7 Relative equilibrium
对于以上三种相对平衡构形,若采用三维环形绳系卫星编队,圆柱形和双曲线形的自旋轴将垂直于天底方向,故编队在地球上的投影是一条线,这不适合编队系统进行地球观测;而圆锥形绳系卫星编队的自旋轴则是垂直于轨道切线的,在地球表面的投影是一个椭圆形,这可以增大对地观测范围,所以此圆锥形相对平衡构形被较多采用[28].
由于绳系卫星编队构形较为复杂,人们对系统稳定性的研究虽然取得了一些进展,但仍存在不小的局限性.如学者们仅从数值角度论证了,除直线形构形外绝大多数空间编队是自旋稳定的;当自旋平面与轨道平面重合或垂直时,不同卫星数目的开(闭)轴-辐形编队在一定自旋角速率下都可以实现自旋稳定,但此自旋角速率阀值与卫星数目、自旋倾角等重要的系统参数关系尚不明确;Likins-Pringle相对平衡构形并非是Lyapunov意义下的稳定等.常见绳系卫星编队构形及稳定性如表1所示.
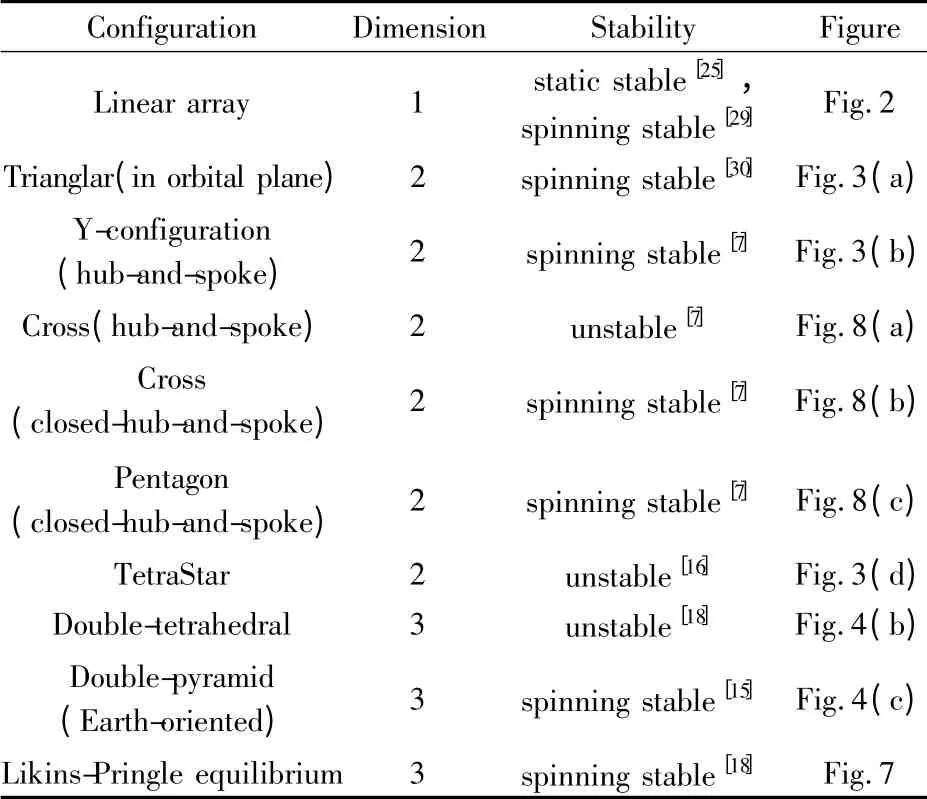
表1 常见绳系卫星编队构形及稳定性Table 1 Formation configuration and stability of tethered satellite
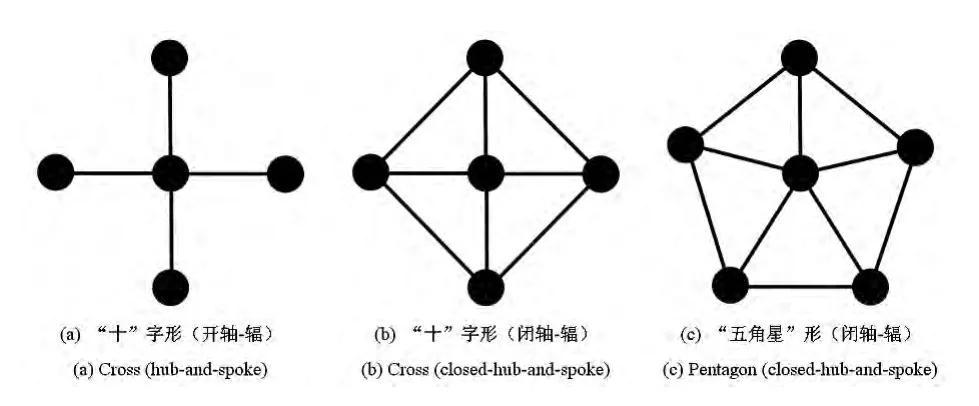
图8 轴-辐形构形Fig.8 Hub-and-spoke configuration
2 动力学与控制
绳系卫星编队系统的动力学与控制研究成果丰富,不过在系统基础方程的建立上还是相对统一的.譬如,系统模型构建及动力学响应研究通常使用第二类Lagrange方程或Newton第二定律[31-32];讨论卫星刚体姿态问题时经常涉及动量矩定理[33]等.最近,有学者提出利用图论方法研究系统编队的复杂构形[34].
2.1 周期运动
空间多体绳系卫星编队系统存在着丰富的动力学行为,主要有两类运动颇受学者们关注,即围绕系统质心的自旋运动和类似单摆的系绳振荡.关于系统自旋运动稳定性的主要研究成果已列于表1,其中Pizarro-Chong等在数值研究中发现,对运行于圆周轨道的开(闭)轴-辐形绳系卫星编队,若卫星体数目不小于4,自旋编队构形通常是稳定的[7].Kumar等在对三角形绳系卫星编队进行数值仿真时发现,此类编队的自旋速率必须大于轨道速率的0.58倍才能保持系统在轨道平面内自旋稳定[30].此外,Williams分别对三维三体和双金字塔形两类绳系卫星编队进行了讨论,通过利用系绳拉伸进行最优控制实现了系统转轴朝地的周期自旋运动[35-36].
同时,系绳振荡也受到人们的持续关注.比如,Modi等分别将系绳考虑为刚性杆和柔性体模型,深入研究了多体绳系卫星编队中系绳的横向与纵向、面内与面外振荡[37-39].Arrell等论述了对深空旋转绳系干涉仪研究的初步结果,采用偏移控制和yo-yo控制抑制系绳的面内和面外振荡,同时提出利用系绳动力学实现绳系干涉仪的重新定位[40].Nakanishi等运用Lyapunov指数、Poincaré映射、van del Pol平面等多种非线性方法,分析了椭圆轨道下多体绳系卫星编队中系绳周期运动的稳定性[41].Kojima等提出了一种“群电动绳系卫星”系统,这种新型编队可在所谓的“磁盘”轨道上实现轨道面外飞行,也可利用电动绳实现面内运动,而且通过同步控制能够使系绳做4p-周期的运动[42].Fedi等考虑重力梯度及系绳拉力的影响,数值分析了轨道面内(外)开(闭)轴-辐形及双金字塔形五种绳系卫星编队,讨论了系绳的横向周期振荡[43-45].
另外,基于限制性三体问题,在日-地系统中存在五个引力平衡点,即日-地平动点L1、L2、L3、L4和L5,如图9所示.这些平动点附近没有重力梯度、残余大气、地磁场等外部摄动,为各类空间科学研究的展开提供了良好条件.其中L1与L2两点距地球最近,且位于L2平动点附近的航天器能够始终背向太阳和地球,易于保护和校准,故更适合于放置空间天文设备.因此,绳系卫星编队在L2平动点附近的力学问题也吸引了不少学者的目光,如Wong等重点研究了开轴-辐形绳系卫星编队在L2平动点附近的动力学行为,利用线性二次型控制器对系绳的面内、面外天平摆动进行了有效抑制,还设计了一套线性反馈控制器通过调节系绳长度及角位移实现系统的螺旋展开[46-48].蔡志勤团队建立了三维绳系卫星编队在L2平动点附近halo轨道的非线性多体耦合动力学方程,对系统的周期轨道运动、自旋及非自旋稳定性、面内(外)系绳振动、最优轨迹控制等诸多力学问题进行了深入探究[49-54].最近,他们考虑轨-姿耦合,研究了L2平动点附近旋转三角形绳系卫星编队的运动稳定性,数值结果表明自旋速率及运行轨道对系统的稳定性影响很大[55-57].

图9 日-地平动点Fig.9 Sun-Earth libration points
2.2 展开与回收
对于空间多体绳系卫星系统,其稳定展开直接关系到系统后期能否正常工作,另一方面,稳定回收与系统安全也是息息相关的,目前此方面也已产生较多的研究成果.譬如,Nakaya等基于虚拟结构法,分别利用角动量和系绳拉力生成系绳释放控制命令实现了三体环形绳系卫星编队展开,最后通过数值和地面仿真实验验证了此编队展开控制策略[58].Kumar等在研究轨道面内三角形及直线形绳系卫星编队的平衡条件时,也提出了一套系统展开控制策略,通过不断变化自旋速率,系统能够以一个较小的系绳释放速率稳定展开[29-30].此外,Kumar等还设计了一套绳长控制律,使三体串形绳系卫星编队可以沿水平方向稳定展开/回收[59].Williams等基于系绳拉力控制,研究了三体环形绳系卫星编队的自旋展开问题,通过构造最优展开/回收轨迹函数以在最优机动时间下完成构形变化[60-61].Kim等设计了一套自适应输出反馈控制器,实现了TetraStar形绳系卫星编队的渐近稳定展开[62].刘丽丽等讨论了一类面内三体绳系卫星编队系统的最优回收控制问题,针对不同回收初值及回收初值受扰情况,数值研究了此类绳系编队的最优控制张力及飞行轨迹[63].基于时变的离散系绳单元,可以通过仅改变离系绳收放点最近单元的属性来仿真系绳的收放过程,并于适当时刻在离散单元链的最前端加入/移除一个单元,从而实现多体柔性绳系卫星编队展开/回收过程的数值模拟[64].McKenzie分析了在动量交换绳作用下空间多体绳系系统展开过程的动力学特性,讨论了轨道偏心率、系绳制动、绳长控制律等对释放过程的影响[65].蔡志勤等在讨论L2平动点附近非自旋绳系卫星编队时发现,系绳在释放阶段的天平振动比回收时稳定得多[52].同时,他们采用线性系绳收放控制律,数值分析了L2平动点附近三角形绳系卫星编队展开/回收过程的稳定性,同时讨论了初始旋转速率及耦合的轨道振幅对收放过程的影响[66].
2.3 刚体姿态控制
对于空间飞行的绳系卫星编队,由于内部安装有大量精密仪器或在观测时的精度要求,卫星本体的刚体姿态往往不能忽略.如Modi等讨论了一类空间绳系卫星编队-平台系统的刚体动力学问题,通过Lyapunov方法将刚体平台控制到平衡位置[67].同时,他们还研究了运行于三维空间的多体绳系卫星编队,考虑柔性系绳横向及纵向振动对卫星刚体的影响,提出利用线性反馈技术和线性二次高斯/回路转换复原法对卫星刚体天平动及系绳振荡进行抑制[68].Takeichi等数值分析了椭圆轨道下多体绳系卫星编队的子星姿态动力学,通过Poincaré映射发现大气阻尼及重力梯度变化会导致处于周期运动的子星失稳[69].Nakaya等计入卫星姿态,使用虚拟结构法实现了自旋绳系卫星编队的构形机动[70].Vogel以空间遥感任务为背景,在其博士学位论文中详细描述了各类构形的多体绳系卫星编队,通过推进力、预调卷轴及拉力卷轴等完成对卫星刚体的姿态控制[71].Chung等先后采用线性控制、非线性控制、分散控制、同步控制,讨论了多体绳系卫星的卫星刚体姿态控制问题;此外,还介绍了已开展的空间绳系卫星编队实验器件及实施方法,展示了测试平台及初步的实验结果[11,72-76].文浩等通过气浮实验装置对空间绳系卫星的编队构形、收放控制、位移测量及刚体姿态进行了二维物理仿真[77],如图10所示.Chang等采用状态相关Riccati法控制器对卫星刚体姿态进行误差调节,实现了三维三体绳系卫星编队的全局渐近稳定控制[78].黄静等考虑一类直线形三体旋转绳系卫星的参数不确定性及未知有界干扰,设计了一套分布式鲁棒最优控制器,对卫星刚体进行姿态跟踪控制[79];同时,又针对此类系统的外部有界干扰和控制饱和问题,提出一套分布式欠驱动非线性控制器,仅通过力矩作用便能使该欠驱动系统的卫星刚体姿态能够以较高的精度跟踪并达到期望状态[80].

图10 绳系卫星编队仿真器Fig.10 Simulators for tethered satellite formation
3 展望
不难看出,绳系卫星编队构形及稳定性、自旋运动、系绳振动、L2平动点附近周期运动、系统展开/回收、卫星刚体姿态的动力学及控制研究已取得不少进展,而且空间多体绳系卫星编队因其潜在的应用前景也必将会受到更多学者的密切关注.但是,在取得丰硕成果的同时仍有许多不足,基于以上论述,我们可将今后的研究放眼于以下几方面:
(1)高维多自由度绳系卫星编队飞行的理论分析.目前绳系卫星编队构形的稳定性、动力学行为、控制方法等大多使用数值方法.
(2)多物理场耦合因素对系统的影响研究.诸如J2摄动、空间碎片冲击、热交变、太阳光压等空间环境对系统扰动的影响研究尚不充分.
(3)编队构形地面实验研究.目前地面实验研究仅局限于简单绳系卫星编队,复杂编队尤其是三维空间编队构形实验无人尝试.
1 Sanmartín JR,Lorenzini E C,Martinez-Sanchez M.Electrodynamic tether applications and constraints.Journal of Spacecraft and Rockets,2010,47(3):442~456
2 Peláez J,Bombardelli C,Scheeres D J.Dynamics of a tethered observatory at Jupiter.Journal of Guidance,Control,and Dynamics,2012,35(1):195~207
3 Woo P,Misra A K.Mechanics of very long tethered systems.Acta Astronautica,2013,87(1):153~162
4 Zhang F,Sharf I,Misra A K,et al.On-line estimation of inertia parameters of space debris for its tether-assisted removal.Acta Astronautica,2015,107(1):150~162
5 Williams P.Dynamics of tethered satellite formations.In:Proceedings of AAS/AIAA Space Flight Mechanics Meeting,San Antonio,USA,2002
6 朱振才,杨根庆,余金培等.微小卫星组网与编队技术的发展.上海航天,2004,6(1):46~49(Zhu Z C,Yang G Q,Yu JP,et al.The development of micro-satellite network and formation technologies.Aerospace Shanghai,2004,6(1):46~49(in Chinese))
7 Pizarro-Chong A,Misra A K.Dynamics of a multi-tethered satellite formation.In:Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Providence,USA,2004
8 Misra A K,Amier Z,Modi V J.Attitude dynamics of three-body tethered systems.Acta Astronautica,1988,17(10):1059~1068
9 Tan Z,Bainum P M.Tethered satellite constellations in auroral observation mission.In:Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Monterey,USA,2002
10 Topal E,Daybege U.Dynamics of a trianglar tethered satellite system on a low earth orbit.In:Proceedings of 2nd International Conference on Recent Advances in Space Technologies,Istanbul,Turkey,2005
11 Chung SJ.Nonlinear control and synchronization of multiple lagrangian systems with application to tethered formation flight spacecraft[PhD Thesis].Cambridge:Massachusetts Institute of Technology,2007
12 Corrêa A A,Gómez G.Equilibrium configurations of a four-body tethered system.Journal of Guidance,Control,and Dynamics,2006,29(6):1430~1435
13 Kim M,Hall C D.Control of a rotating variable-length tethered system.Journal of Guidance,Control,and Dynamics,2004,27(5):849~858
14 Misra A K,Pizzaro-Chong A.Dynamics of tethered satellites in a hub-spoke formation.In:Proceedings of AAS/AIAA Astrodynamics Specialists Conference,Big Sky,USA,2003
15 Pizarro-Chong A D.Dynamics of multi-tethered satellite formations[Master Thesis].Montreal:McGill University,2005
16 Kim M,Hall CD.Dynamics and control of tethered satellite systems for NASA's SPECSmission.In:Proceedings of AAS/AIAA Astrodynamics Specialists Conference,Big Sky,USA,2003
17 谢永亮.辐射开环绳系卫星编队飞行的稳定性分析[硕士学位论文].南京:南京航空航天大学,2007(Xie Y L.The stability analysis of a hub-and-spoke tethered satellite formation flying[Master Thesis].Nanjing:Nanjing University of Aeronautics and Astronautics,2007(in Chinese))
18 Tragesser SG,Tuncay A.Orbital design of earth-oriented tethered satellite formations.In:Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Monterey,USA,2002
19 Sabatini M,Palmerini G B.Dynamics of a 3D rotating tethered formation flying.In:Proceedings of Aerospace Conference,Big Sky,USA,2007
20 Beletsky V V,Levin E M.Stability of a ring of connected satellites.Acta Astronautica,1985,12(10):765~769
21 Quadrelli M.Modeling and dynamics of tethered formations for space interferometry.In:Proceedings of AAS/AIAA Spaceflight Mechanics Meeting,Santa Barbara,USA,2001
22 Cassanova R A.A contamination-free ultrahigh precision formation flight method based on intracavity photon thrusters and tethers:Photon tether formation flight(PTFF),Phase 1 Final Report.Washington:NASA,2006
23 Guerman A,Smirnov G,Paglione P,et al.Dynamics of tetrahedron tethered satellite formation.In:Proceedings of 2nd International Workshop“Spaceflight Dynamics and Control”,Covilhã,Portugal,2006
24 Guerman A D,Smirnov G,Paglione P,et al.Stationary configurations of a tetrahedral tethered satellite formation.Journal of Guidance,Control,and Dynamics,2008,31(2):424~428
25 Cosmo M L,Lorenzini E C.Tethers in space handbook,3rd Edition.Washington:NASA,1997
26 Tragesser SG.Formation flying with tethered spacecraft.Proceedings of AIAA/AASAstrodynamics Specialist Conference,Denver,USA,2000
27 Tuncay A.Stability of a tethered satellite formation about the Likins-Pringle equilibria[Master Thesis].Dayton:Air University,2002
28 Tragesser SG,Tuncay A.Orbital design of earth-oriented tethered satellite formations.Journal of the Astronautical Sciences,2005,53(1):1~14
29 Kumar K D,Yasaka T.Dynamics of rotating linear array tethered satellite system.Journal of Spacecraft and Rockets,2005,42(2):373~378
30 Kumar K D,Yasaka T.Rotating formation flying of three satellites using tethers.Journal of Spacecraft and Rockets,2004,41(6):973~985
31 刘丽丽.绳系卫星动力学分析与控制的若干研究[博士学位论文].南京:南京航空航天大学,2008(Liu L L.Studies on dynamic analysis and control of tethered satellite system[PhD Thesis].Nanjing:Nanjing University of Aeronautics and Astronautics,2008(in Chinese))
32 刘壮壮,宝音贺西.基于非线性单元模型的绳系卫星系统动力学.动力学与控制学报,2012,10(1):21~26(Liu Z Z,Baoyin Hexi.Dynamics of tethered satellite system based on nonlinear unit model.Journal of Dynamics and Control,2012,10(1):21~26(in Chinses))
33 Gates S S.Dynamics model for a multi-tethered spacebased interferometer.Washington:Naval Research Laboratory,2000
34 Larsen M B,Smith R S,Blanke M.Modeling of tethered satellite formations using graph theory.Acta Astronautica,2011,69(7-8):470~479
35 Williams P.Periodic optimal control of a spinning earthpointing tethered satellite formation.In:Proceedings of AIAA/AASAstrodynamics Specialist Conference and Exhibit,Keystone,USA,2006
36 Williams P.Optimal control of a spinning double-pyramid earth-pointing tether formation.Acta Astronautica,2009,64(11-12):1191~1223
37 Misra A K,Modi V J.Three-dimensional dynamics and control of tether-connected n-body systems.In:Proceedings of 28th Aerospace Sciences Meeting,Reno,USA,1990
38 Keshmiri M,Misra A K,Modi V J.General formulation for n-body tethered satellite system dynamics.Journal of Guidance,Control,and Dynamics,1996,19(1):75~83
39 Kalantzis S,Modi V J,Pradhan S,et al.Order-n formulation and dynamics of multibody tethered systems.Journal of Guidance,Control,and Dynamics,1998,21(2):277~285
40 Arrell R,Kasdin N J.Reorientation of rotating deep space tethered constellations.In:Proceedings of AIAA Guidance,Navigation and Control Conference and Exhibit,Austin,USA,2003
41 Nakanishi K,Fujii H A.Periodic motion of multi-compound-tether satellite system.In:Proceedings of 56th International Astronautical Congress of the International Astronautical Federation,the International Academy of Astronautics,and the International Institute of Space Law,Fukuoka,Japan,2005
42 Kojima H,Iwashima H,Trivailo PM.Libration synchronization control of clustered electrodynamic tether system using kuramoto model.Journal of Guidance,Control,and Dynamics,2011,34(3):706~718
43 Avanzini G,Fedi M.Refined dynamical analysis of multitethered satellite formations.Acta Astronautica,2013,84(1):36~48
44 Avanzini G,Fedi M.Effects of eccentricity of the reference orbit on multi-tethered satellite formations.Acta Astronautica,2014,94(1):338~350
45 Fedi M.Dynamics and control of tethered satellite formations in low-earth orbits[PhD Thesis].Castelldefels:Polytechnic University of Catalonia,2015
46 Wong B.Dynamics of a multi-tethered satellite system near the Sun-Earth Lagrangian point[Master Thesis].Montreal:McGill University,2003
47 Wong B,Misra A.Dynamics of a libration point multitethered system.In:Proceedings of 55th International Astronautical Congress,Vancouver,Canada,2004
48 Wong B,Misra A.Planar dynamics of variable length multi-tethered spacecraft near collinear Lagrangian points.Acta Astronautica,2008,63(11-12):1178~1187
49 Zhao J,Cai Z Q.Nonlinear dynamics and simulation of multi-tethered satellite formations in halo orbits.Acta Astronautica,2008,63(5-6):673~681
50 赵军,蔡志勤,齐朝晖等.日地系统L2点halo轨道绳系卫星编队动力学.应用力学学报,2010,27(1):1~7(Zhao J,Cai Z J,Qi Z H,et al.Dynamics of tethered satellite formation on halo orbits near L2point of Sun-Earth system.Chinese Journal of Applied Mechanics,2010,27(1):1~7(in Chinese))
51 赵军.平动点附近多体绳系卫星编队动力学与控制[博士学位论文].大连:大连理工大学,2010(Zhao J.Dynamic and control of multi-tethered satellite formations near libration point[PhD Thesis].Dalian:Dalian University of Technology,2010(in Chinese))
52 Zhao J,Cai Z Q,Qi Z H.Dynamics of variable-length tethered formations near libration points.Journal of Guidance,Control,and Dynamics,2010,33(4):1172~1183
53 赵军,蔡志勤,齐朝晖.基于平动点轨道的绳系卫星编队重构仿真.系统仿真学报,2011,23(12):2805~2811(Zhao J,Cai Z J,Qi Z H.Simulation of reconfiguration of tethered satellite formations in libration point orbits.Journal of System Simulation,2011,23(12):2805~2811(in Chinese))
54 Cai Z Q,Li X F,Peng H J,et al.Optimal tracking control of rotating multi-tethered formations in halo orbits.In:Proceedings of 11th World Congress on Computational Mechanics,5th European Conference on Computational Mechanics,and 6th European Conference on Computational Fluid Dynamics,Barcelona,Spain,2014
55 周红.平动点附近旋转三角形绳系卫星编队动力学[硕士学位论文].大连:大连理工大学,2012(Zhou H.Dynamic of Rotating triangle-like tethered satellite formation near the libration point[Master Thesis].Dalian:Dalian University of Technology,2012(in Chinese))
56 蔡志勤,周红,李学府.旋转三角形绳系卫星编队系统动态稳定性分析.计算力学学报,2013,30(z):62~67(Cai ZJ,Zhou H,Li X F.Dynamic stability analysis of the rotating triangle tethered satellite formation.Chinese Journal of Computational Mechanics,2013,30(z):62~67(in Chinese))
57 Cai Z Q,Li X F,Zhou H.Nonlinear dynamics of a rotating triangular tethered satellite formation near libration points.Aerospace Science and Technology,2015,42(1):384~391
58 Nakaya K,Iai M,Omagari K,et al.Formation deployment control for spinning tethered formation flying-simulations and ground experiments.In:Proceedings of AIAA Guidance,Navigation and Control Conference and Exhibit,Providence,USA,2004
59 Kumar K D,Patel T R.Dynamics and control of multiconnected satellites aligned along local horizontal.Acta Mechanica,2009,204(3-4):175~191
60 Williams P.Optimal deployment/retrieval of a tethered formation spinning in the orbital plane.Journal of Spacecraft and Rockets,2006,43(3):638~650
61 Williams P.Optimal deployment and offset control for a spinning flexible tethered formation.In:Proceedings of AIAA Guidance,Navigation and Control Conference and Exhibit,Keystone,USA,2006
62 Kim M,Hall CD.Dynamics and control of rotating tethered satellite systems.Journal of Spacecraft and Rockets,2007,44(3):649~659
63 刘丽丽,文浩,金栋平等.三体绳系卫星面内编队飞行的回收控制.振动工程学报,2008,21(3):223~227(Liu L L,Wen H,Jin DP,et al.Retrieval control of a three-body tethered formation in orbital plane.Journal of Vibration Engineering,2008,21(3):223~227(in Chinese))
64 文浩.绳系卫星释放和回收的动力学控制[博士学位论文].南京:南京航空航天大学,2009(Wen H.Dynamic control for deployment and retrieval tethered satellite systems[PhD Thesis].Nanjing:Nanjing University of Aeronautics and Astronautics,2009(in Chinese))
65 McKenzie D J.The dynamics of tethers and space-webs[PhD Thesis].Glasgow:University of Glasgow,2010
66 Cai Z Q,Li X F,Wu Z G.Deployment and retrieval of a rotating triangular tethered satellite formation near libration points.Acta Astronautica,2014,98(1):37~49
67 Modi V J,Gilardi G,Misra A K,et al.Attitude control of space platform based tethered satellite system.Journal of Aerospace Engineering,1998,11(2):24~31
68 Kalantzis S,Modi V J,Pradhan S,et al.Dynamics and control of multibody tethered systems.Acta Astronautica,1998,42(9):503~517
69 Takeichi N,Natori M C,Okuizumi N.Dynamic behavior of a tethered system with multiple subsatellites in elliptic orbits.Journal of Spacecraft and Rockets,2001,38(6):914~921
70 Nakaya K,Matunaga S.On attitude maneuver of spinning tethered formation flying based on virtual structure method.In:Proceedings of AIAA Guidance,Navigation and Control Conference and Exhibit,San Francisco,USA,2005
71 Vogel K A.Dynamics and control of tethered satellite formations for the purpose of space-based remote sensing[PhD Thesis].Dayton:Air University,2006
72 Chung SJ,Kong E M,Miller D W.SPHEREStethered formation flight testbed:application to NASA's SPECS mission.In:Proceedings of SPIE 5899,UV/Optical/IR Space Telescopes:Innovative Technologies and Concepts II,San Diego,USA,2005
73 Chung SJ,Kong E M,Miller D W.Dynamics and control of tethered formation flight spacecraft using the SPHERES testbed.In:Proceedings of AIAA Guidance,Navigation and Control Conference,San Francisco,USA,2005
74 Chung SJ,Slotine J J E,Miller D W.Nonlinear model reduction and decentralized control of tethered formation flight.Journal of Guidance,Control,and Dynamics,2007,30(2):390~400
75 Chung SJ,Slotine JJE,Miller DW.New control strategies for underactuated tethered formation flight spacecraft.In:Proceedings of AIAA Guidance,Navigation and Control Conference and Exhibit,Hilton Head,USA,2007
76 Chung SJ,Miller D W.Propellant-free control of tethered formation flight,part 1:linear control and experimentation.Journal of Guidance,Control,and Dynamics,2008,31(3):571~584
77 Wen H,Jin D P,Hu H Y.Advances in dynamics and control of tethered satellite systems.Acta Mechanica Sinica,2008,24(3):229~241
78 Chang I,Park SY,Choi K H.Nonlinear attitude control of a tether-connected multi-satellite in three-dimensional space.IEEE Transactions on Aerospaceand Electronic Systems,2010,46(4):1950~1968
79 黄静,刘刚,马广富.直连式三体绳系卫星姿态鲁棒最优跟踪控制.航空学报,2012,33(4):679~687(Huang J,Liu G,Ma G F.Nonlinear optimal attitude tracking control of uncertain three-inline tethered satellite systems.Acta Aeronautica et Astronautica Sinica,2012,33(4):679~687(in Chinese))
80 黄静,李传江,马广富.欠驱动直连式三体绳系卫星非线性姿态跟踪控制.航空学报,2015,36(6):1995~2004(Huang J,Li C J,Ma G F.Nonlinear attitude tracking control of underactuated three-inline tethered satellite.Acta Aeronautica et Astronautica Sinica,2015,36(6):1995~2004(in Chinese))
