高压断路器永磁电机机构及控制系统设计
2015-02-23刘爱民毕玉洁吴志恒杨艳辉
刘爱民,毕玉洁,吴志恒,杨艳辉
(1.沈阳工业大学电气工程学院,辽宁沈阳 110870;2.沈阳工业大学辽宁省电网安全运行与监测重点实验室,辽宁沈阳 110870)
高压断路器永磁电机机构及控制系统设计
刘爱民1,2,毕玉洁1,2,吴志恒1,2,杨艳辉1,2
(1.沈阳工业大学电气工程学院,辽宁沈阳 110870;2.沈阳工业大学辽宁省电网安全运行与监测重点实验室,辽宁沈阳 110870)
为实现126 kV高压真空断路器的智能化操作,满足断路器分合闸速度要求,提出一种新型的断路器分合闸电机操动机构及控制系统。结合126 kV高压真空断路器的负载特性,在分析表贴式、燕尾槽表贴埋入型、直线内嵌型和外V内嵌型4种电机转子后,提出了一种多槽双层表贴埋入式定子及转子永磁电机设计方案,并设计了以数字信号处理器为核心的硬件控制装置。开展126 kV高压真空断路器的联机实验,结果表明,采用上述操动机构及控制系统能够满足126 kV高压真空断路器分合闸速度指标的要求,且分合闸时间具有良好的稳定性。
真空断路器;电机操动机构;数字信号处理器;分合闸速度;稳定性
0 引言
高压断路器在电网系统中起到切断故障线路保护电网稳定运行的作用,有效的实现断路器的分合闸以及自动重合闸操作对电网的安全以及排除故障线路都具有十分重大的意义[1-2]。
断路器能否按照预设的要求完成分合闸操作且具有稳定性,其操动机构性能起决定性作用。传统的真空断路器操动机构主要有电磁操动机构、弹簧操动机构和永磁操动机构等,这些传动机构均存在机械零部件多,机构复杂,难以实现对断路器分合闸的过程控制等缺点,难以满足国家电网对电网电器智能化操作的要求[2-6]。
近年来,随着新型操动机构的相继问世,尤其是电机操动机构,采用电子操动系统控制功率器件实现断路器的分、合操作,运动部件少,动作分散性小,这为高压断路器触头运动控制提供了可能[7-11]。本文针对126 kV真空断路器的负载特性,在分析了表贴式、燕尾槽表贴埋入型、直线内嵌型和外V内嵌型4种电机转子输出性能后,提出了一种多槽双层表贴埋入式定子及转子永磁电机设计方案。并结合所提出的电机操动机构搭建了以数字信号处理器为核心的控制系统平台。开展126 kV真空断路器分合闸联机实验,通过实验数据分析,验证所提出的新型电机机构能够有效满足高压真空断路器对分合闸速度的要求指标及分合闸时间稳定性。
1.1 26kV真空断路器电机机构运动特性分析
电机机构在运动过程中的各部件质量全部归算到f处的等效质量为Mf,通过能量守恒原理,可求得机构操作力与触头速度特性的动态关系为

式中:Fi为结构操作力;Fj为真空断路器反力;Ml为各轴销处的摩擦力矩。
由于轴销处的摩擦力矩相对操作力与断路器反力较小,且为动触杆行程的函数复杂,因此,工程上通常不计算各轴销处的摩擦损耗,而是用连杆机构的效率来表示该损耗对整个运动系统的影响,所以式(4)可改写为

式中:η为运动系统的机械效率。
依据上述合闸不同阶段等效力的计算方法,得到驱动电机主轴的负载力矩曲线如图1所示。在0°~36.52°范围内为断路器的开距阶段,电机负载转矩比较小;当电机转角达到36.52°时,由于触头弹簧初始压力的存在,电机负载转矩突增至最大值930 N·m,之后随着转角的增加,负载转矩逐渐减小。同理分闸过程计算反力矩如图1(b)所示。在高压断路器电机操动机构的控制系统中,需控制驱动电机按图1的规律出力,实现真空断路器负载反力特性与机构出力特性的合理配合。
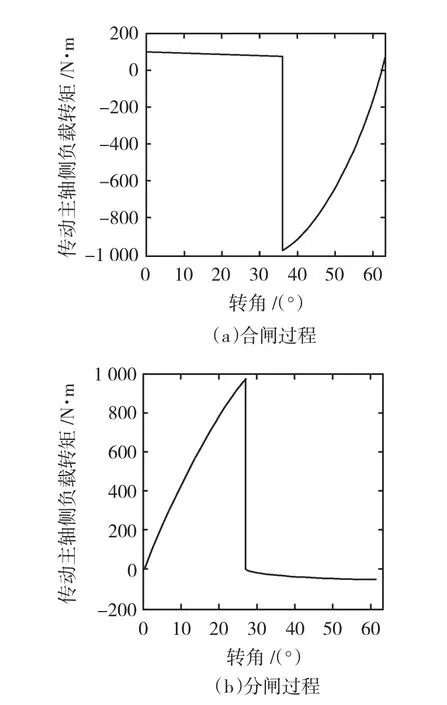
图1 电机机构侧力矩与触头行程关系Fig.1Relationship of motor mechanism side torque and contact trip
2 驱动电机的设计
2.1 转子励磁结构的选择
为了满足电机机构与真空断路器运动特性的合理配合,分别对表贴埋入型转子结构、燕尾槽表贴埋入型转子结构、直线内嵌型转子结构和外V内嵌型转子结构4种转子励磁结构进行仿真分析。4种驱动电机的转子结构如图2所示。

图2 改进型驱动电机转子结构Fig.2Structure of modified drive motor rotor

图3 断路器分合闸操作时驱动电机的动态特性Fig.3Drive motor dynamic characteristic of circuit breaker opening and closing operation
图3显示的是在合闸、分闸过程中4种转子的启动电流、电磁转矩、电机角位移曲线图。其中1是普通表贴埋入型,2是燕尾槽表贴埋入型,3是直线内嵌型,4是外V内嵌型。
2.2 定子结构的设计
为减小电机体积,增大输出转矩,选择定子的绕线方式是多槽双层绕组电机定子结构。多槽双层绕组电机定子结构图如图4所示。针对电机定子的绕组的多槽单层结构与多槽双层结构的性能进行了仿真计算。

图4 定子结构及仿真曲线Fig.4Stator structures and the simulation curve
仿真条件:初始电压为150 V,驱动电流100 A,旋转角度64°~80°。其合闸过程中角位移特性曲线如图4(b)所示。分析可知:多槽双层的定子绕组在分合闸时间、电机的响应时间均呈现明显的优势。通过上述对电机定转子分析,本设计电机的定子绕组选择的是多槽双层绕组,转子选择的是普通表贴埋入型转子结构。
3 基于DSP28335硬件控制平台的搭建及联机实验
电机操动机构系统及控制系统如图5所示。DSP和IGBT驱动模块开断相应的通路,释放存储在电容器组内的电量驱动电机的旋转,实现断路器的分合闸操作;通过改变控制器发出的PWM波信号参数控制驱动电机的电流和速度,实现对操动机构动触头控制,进而实现断路器分合闸运动过程的全程控制的要求。
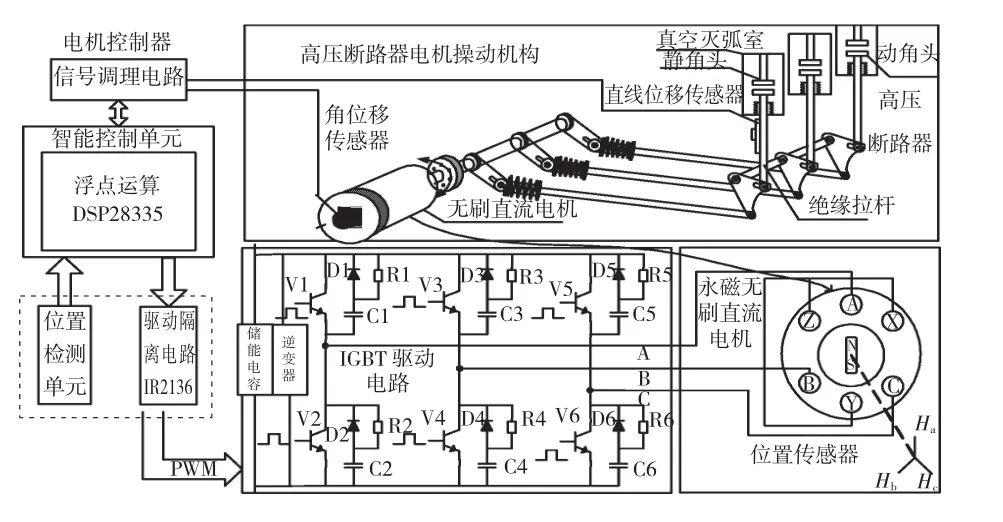
图5 电机操动机构及控制系统Fig.5Motor operating mechanism and control system
根据126 kV真空断路器主要机械特性参数如表1所示,为了验证本电机及其控制系统的有效性,开展126 kV高压真空断路器与电机操动机构及其控制装置联机实验。图6为126 kV高压真空断路器及电机机构操作平台。

图6 126kV断路器及电机机构Fig.6126 kV circuit breaker and its motor mechanism

表1 126kV真空断路器主要机械特性参数Table 1Parameters of mechanical characteristics of 126 kV vacuum circuit breaker
4 实验数据分析
在实验过程中,通过示波器分别采集了电机的三相电流、角位移信号以及刚分跳变信号,其中刚合跳变信号是为计算刚合时间。实测波形如图7所示。
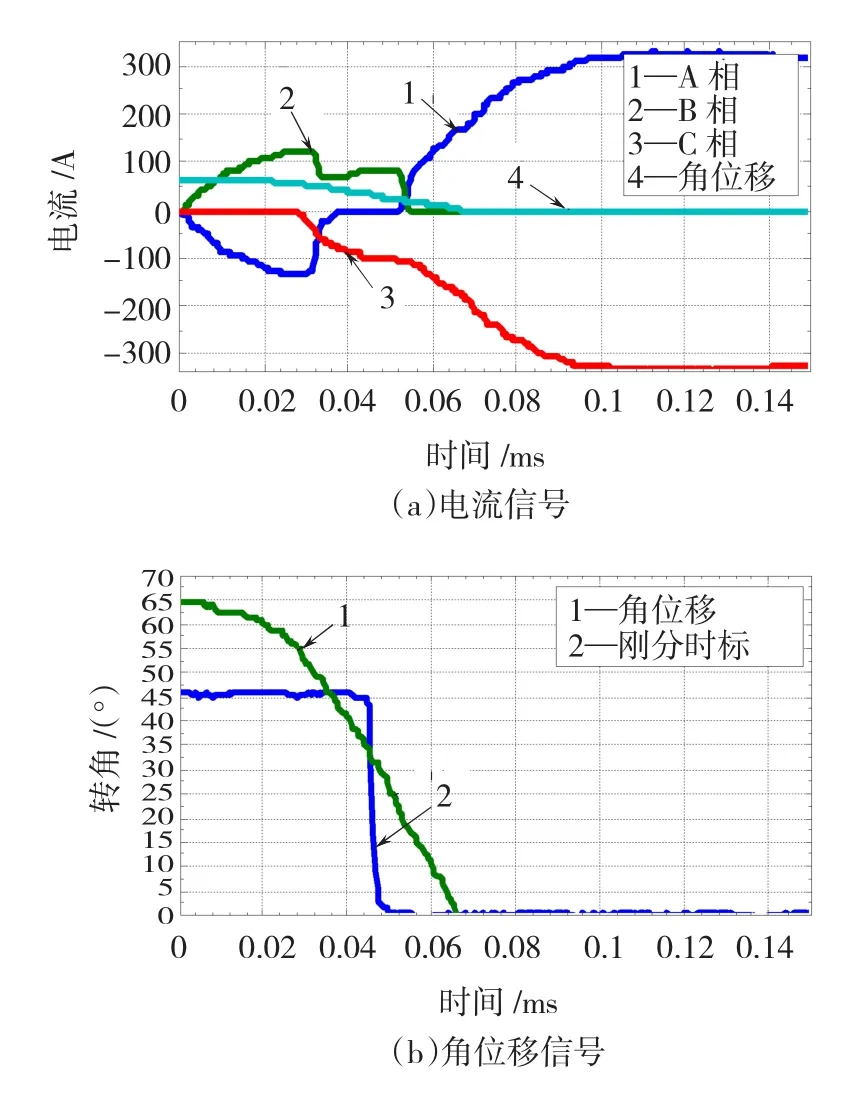
图7 分闸实验数据曲线Fig.7Experiment data curve of opening
根据图7的分析可知,在外加电压为350 V时,断路器在30 ms左右时间内完成了分闸动作。经过计算,平均分闸速度达到3.45 m/s,满足126 kV高压真空断路器分闸速度2.2±0.2 m/s的要求。

图8 合闸实验数据曲线Fig.8Experiment data curve of closing
图8为断路器合闸过程中电机的三相电流、角位移信号以及刚合跳变信号图。根据图分析可知,在外加电压是350 V,断路器合闸时间是40 ms,平均合闸速度为2.42 m/s,满足了126 kV高压真空断路器合闸速度1.3±0.2 m/s速度要求。
为验证该电机机构配合设计的控制装置工作的稳定性,在实现断路器分合闸的基础上,验证该机构在较大机械碰撞下能完成保持分合闸时间浮动在允许范围内(小于2 ms)。该组实验选择的条件是:外加电压是260 V,PWM占空比恒为95%。其中实验数据如图9所示。

图9 多组分合闸实验数据Fig.9Multidrug experimental data of closing and opening
通过图9分析可知,3次分闸时间分别为24.08 ms、24.16 ms、25.25 ms,分闸时间浮动最大为1.17 ms,3次合闸时间分别为39.96 ms、40.09 ms、40.25 ms,合闸时间浮动最大是0.29 ms,均远小于2 ms。证实了该机构配合控制装置工作时,分合闸时间呈现出良好的稳定性。
5 结论
本文研究了126 kV高压真空断路器电机操动机构,根据操动机构运动特性分析,设计了操动电机及控制装置,并通过仿真与大量实验分析得出以下结论:
1)所设计定子绕组选择多槽双层绕组,转子选择普通表贴埋入型转子结构的操动电机具有良好的输出特性。
2)联机实验表明,在外加电压350 V时,分闸速度达到3.45 m/s,合闸速度达到2.42 m/s,满足126 kV真空断路器速度要求指标。
3)分合闸时间稳定性实验证实,合闸时间浮动最大值是0.29 ms,分闸时间浮动的最大值是1.17 ms,均小于2 ms。具有良好的分合闸时间稳定性。
[1]林莘.现代高压电器技术[M].北京:机械工业出版社,2011: 283-299.
[2]林莘,徐建源,高会军.永磁操动机构动态特性计算与分析[J].中国电机工程学报,2002,22(6):85-88.
LIN Xin,XU Jianyuan,GAO Huijun.Calculation and analyses of permanent magnetic actuator dynamic behavior[J].Proceedings of the CSEE,2002,22(6):85-88.
[3]游一民,陈德桂,张银昌,等.真空断路器关合速度与预击穿对同步关合的影响研究[J].电工技术学报,2004,19(7):85-89.
YOU Yimin,CHEN Degui,Zhang Yinchang,et al.Study of the influence of the closing velocity and the pre-strike on synchronous closing in a vacuum circuit breaker[J].Transactions of China E-lectro technical Society,2004,19(7):85-89.
[4]黄瑜珑,王静君,徐国政,等.配永磁机构真空断路器运动特性控制技术的研究[J].高压电器,2005,41(5):321-323.
HUANG Yulong,WANG Jingjun,XU Guozheng et al.Investigation on the controlling techniques of moving contact behaviors for vacuum circuit breaker with permanent magnetic actuator[J].High Voltage Apparatus,2005,41(5):321-323.
[5]魏本纪.双稳态永磁操动机构与真空断路器的特性配合问题探讨[J].高压电器,2002,38(1):27-30.
WEI Benji.Discussion on characteristic matching of bi-stable permanent magnetic actuator and vacuum circuit breaker[J].High Voltage Apparatus,2002,38(1):27-30.
[6]林莘,王德顺,徐建源.高压断路器直线伺服电机操动机构及其控制技术[J].中国电机工程学报,2008,28(27):137-142.
LIN Xin,WANG Deshun,XU Jianyuan.Linear servo motor operating mechanism and control technique for high-voltage circuit breaker[J].Proceedings of the CSEE,2008,28(27):137-142.
[7]林莘.永磁机构与真空断路器[M].北京:机械工业出版社,2002:5.
[8]BOSMA A,THURESON P D.A new reliable operating mechanism for HVAC circuit-breakers[C]//IEEE/PES Transmission and Distribution Conference and Exposition,Atlanta,USA.2001:17-23.
[9]李永祥,林莘,徐建源.高压断路器永磁无刷直流电机操动机构的设计及动态仿真[J].电网技术,2010,34(1):185-189.
LI Yongxiang,LIN Xin,XU Jianyuan.Design of a novel permanent magnet brushless DC motor-driven operating mechanism for high-voltage circuit breaker and its dynamic simulation[J].Pow-er System Technology,2010,34(1):185-189.
[10]林莘,马跃乾,徐建源.高压断路器新型操动机构电机设计分析[J].沈阳工业大学学报,2008,30(2):129-133.
LIN Xin,MA Yueqian,XU Jianyuan.Design and analysis of novel operating mechanism drive motor for high voltage circuit breaker[J].Journal of Shenyang University of Technology,2008,30(2):129-133.
[11]林莘,李永祥,马跃乾,等.高压断路器新型电机操动机构的动态特性分析[J].电机与控制学报,2009,13(2):216-221.
LIN Xin,LI Yongxiang,MA Yueqian,et al.Dynamic characteristics analysis on novelmotor actuator of high voltage circuit breaker[J].Electric Machines and Control,2009,13(2):216-221.
(编辑:刘琳琳)
Design on high voltage vacuum circuit breaker motor operating mechanism and control system
LIU Ai-min1,2,BI Yu-jie1,2,WU Zhi-heng1,2,YANG Yan-hui1,2
(1.School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China; 2.Liaoning Province Key Laboratory of Power Grid Safe Operation and Monitoring,Shenyang University of Technology,Shenyang 110870,China)
In order to achieve the intelligent operation of 126 kV high voltage vacuum circuit breaker,and meet the requirement of circuit breaker opening and closing speed,a new kind of circuit breaker opening and closing motor operating mechanism and control system was proposed.Combined with the load characteristic of 126 kV high voltage vacuum circuit breaker,and based on the analysis of surface-mount,dovetail groove table type,linear embedded type and type V inline four kinds of motor rotor,the design project of multi double table stick embedded type stator and the rotor permanent magnet motor were proposed,and then the control device with digital signal processor as the core was designed.Online experiment of 126 kV high voltage vacuum circuit breaker was conducted.Results show that adopting the above operation mechanism and control system satisfies the opening and closing speed demands indicator of 126 kV high voltage vacuum circuit breaker and the closing time has a good stability.
vacuum circuit breaker;the motor operating mechanism;digital signal processor;opening and closing speed;stability
10.15938/j.emc.2015.01.007
TM 346
A
1007-449X(2015)01-0045-06
2014-06-04
国家自然科学基金资助(51377107)
刘爱民(1961—),女,博士,副教授,研究方向为直线电机、智能化电器;
毕玉洁(1983—),女,硕士研究生,研究方向为电力系统及其自动化;
吴志恒(1987—),男,硕士研究生,研究方向为高压电器操动机构;
杨艳辉(1987—),男,硕士研究生,研究方向为电力电子及其传动技术。
吴志恒
